
Датчики перемещений
Белорусский государственный университет информатики и радиоэлектроники
Кафедра электронной техники и технологии
РЕФЕРАТ
На тему:
«Датчики перемещений»
МИНСК, 2008
Одним из узлов, определяющих точность работы любой системы позиционирования, являются датчики перемещения. Датчики перемещений предназначены для преобразования величины линейного перемещения или угла оборота ходового винта в унитарный код: простую последовательность одинаковых по длительности и амплитуде электрических импульсов, число которых прямо пропорционально величине углового или линейного перемещения.
Индуктивные датчики
Для преобразования непрерывно изменяющейся величины в дискретные электрические импульсы широко применяются индуктивные и оптические датчики.
Схема индуктивного датчика показана на рисунке 1.
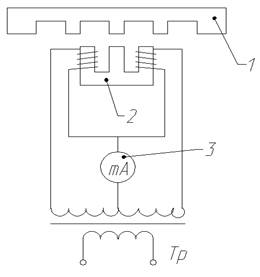
Рисунок 1 - Схема индуктивного датчика.
На подвижной части станка устанавливается тонкая рейка из магнитомягкого материала. Выступы рейки 1 модулируют магнитное сопротивление рабочего зазора при движении. Магнитопровод Ш-образного сердечника 2 имеет две обмотки, включенные навстречу друг другу и питаемые от трансформатора Тр. В диагональ индуктивного моста включен измерительный прибор. В среднем положении измерительный мост сбалансирован и стрелка прибора 3 будет стоят на нуле. Незначительный разбаланс приводит к отклонению стрелки прибора. Хорошо выполненный датчик улавливает перемещения ~2 мкм. Для дискретных схем необходим цифроаналоговый преобразователь (ЦАП).
Фотооптические датчики перемещений.На ходовом винте располагается диск с большим числом щелей (от 100 до 800). Свет от лампы через цилиндрическую линзу в виде узкого пучка направляется на диск и фотоприемник (фотодиод). При шаге ходового винта 2 мм и количестве щелей на диске 400 каждому электрическому импульсу будет 5. иметь дискретность ~0,001 мм число щелей возрастает до 2000 и диаметр диска возрастает до 600 мм, что неприемлемо.
Можно устанавливать счетный диск не на ходовом винте, а на связанный с ним быстроходный вал. Но при этом уменьшится точность отсчета из-за погрешности передачи.
Прецизионные датчики линейных перемещенийПрецизионные датчики линейных перемещений строятся на основе растровых шкал, метрологических дифракционных решеток и лазерных интерферометров. Первые два вида ДЛП строятся на одинаковом принципе контроля перемещений. Они имеют длинную шкалу в виде периодически нанесенных штрихов и визирную короткую шкалу с таким же или кратным периодом штрихов и отверстий. Если пространственная частота расположения штрихов на шкалах не превышает 50-100 мм-1, они называются растровыми шкалами, а если выше 100 мм-1 – метрологическими дифракционными решетками (или дифракционными решетками). Так как дискретность перемещений часто бывает менее 1 мкм, то казалось бы, чем выше частота штрихов, тем легче конструировать схемы формирования электрических импульсов. Однако простая замена растровых шкал дифракционными решетками затрудняется рядом возникающих при этом эффектов, делающих ДЛП чувствительными к изменению расстояния между мерой и визирной шкалой, длиной волны и пр. Системы на основе растровых шкал дифракционных решеток имеют две разновидности – накапливающие системы и системы, использующие эффект муаровых картин.
Накапливающие системыНакапливающие системы используют систему отражающих или пропускающих оптических решеток. Конструкция оптических ДЛП с отражающей решеткой показана на рис.2. Диафрагма сканирующей головки содержит 4 щели. Щели размещены так, что выходные сигналы фотоприемников сдвинуты на четверть периода измерительной решетки. Так сигналы, из-за смещения щелей сдвинуты по фазе и квазисинусоидальные сигналы фотоприемников. Разрешающая способность таких систем 0.5 мкм, что при общей погрешности не более 1 мкм для измерения перемещений в диапазоне 1-2 см.
Недостаток метода: требуется строгая параллельность линий рисок и линейки двигателя. Вторая система решеток использует метод муаровых полос.
Метод муаровых полос.
Муаровые полосы – система темных зон, образуемых при наложении и подсвечивании двух идентичных слегка смещенных под углом друг относительно друга решеток.
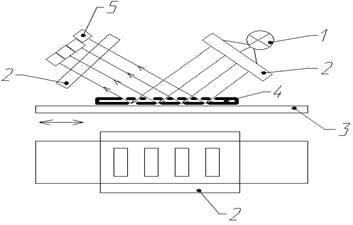
Рисунок 2 - ДЛП перемещений с отражающей решеткой.
1 – источник света, 2 – конденсорные линзы, 3 – стальная шкала с решеткой, 4 - диафрагма, 5 – фотоприемник.
При смещении решеток друг относительно друга зоны (темные и светлые) смещаются друг относительно друга вверх-вниз на расстояние l. Р – шаг решетки, θ – угол наклона.
Основные преимущества способа: (отражательной оптики)
1. муаровая картина не зависит от длины волны света в сравнительно широком диапазоне длин волн. Это позволяет применять в качестве источника света обычные миниатюрные лампы накаливания.
2. сохраняется высокий контраст муаровой картины при относительно больших (до десяти мм) зазорах между решетками.
3. шаг муаровой картины может соответствовать величине перемещений в несколько раз меньше, чем расстояние между штрихами решеток.
Муаровая картина формируется на выходе прозрачной решетки. Линейная ширина периода муаровой картины равна:
 , (1)
, (1)
где, d1 – постоянная прозрачной решетки, θ – угол разворота штрихов.

Рисунок 3 - Схема образования муаровых полос.
В ДЛП этот угол равен примерно 10-4, так, что перемещению решетки на 1 мкм соответствует сдвиг муаровой картины на 10 мм, что легко фиксируется фотоприемником.
Обычно достаточно двух фотоприемников. При перемещении в них формируются сигналы:
I1 = k1(E0 + Ecos2πX/ε) (2)
I2 = k2(E0 ± Esin2πX/ε), (3)
где k1, k2 – чувствительность фотоприемника, Е0 – уровень постоянной составляющей и амплитуды переменной составляющей освещенности муаровой картины, Х – величина перемещения, ![]() - цена периода муаровой картины.
- цена периода муаровой картины.
d2 – постоянная отражающей решетки, qi – порядок дифракционного максимума.
Поскольку на 2 максимуме отражения при равнобедренных рисках приходится 80% отражающей энергии, то q = 2, ε = d2/4.
При определении положения с точностью ±ε возникают трудности интерполяции из-за колебаний постоянной освещенности Е0, которая зависит от многих факторов, в том числе и от колебаний яркости источника света, от изменяющееся отражательной способности решеток и т.д.
Поэтому иногда в ДЛП применяются фотоприемники, расположенные вдоль муаровой картины, со сдвигом на четверть периода и формируются два сигнала, каждый из которых представляет собой разность сигналов двух фотоприемников, расположенных на расстоянии половины периода муаровой картины.
Системы позиционирования с лазерными интерферометрамиСтремление повысить точность систем позиционирования, исключить зависимость их параметров от точности изготовления направляющих и их износа в процессе эксплуатации привело к созданию нового типа систем позиционирования с лазерными интерферометрами.
Поясним качественно не прибегая к формулам, как действует лазерный интерферометр.
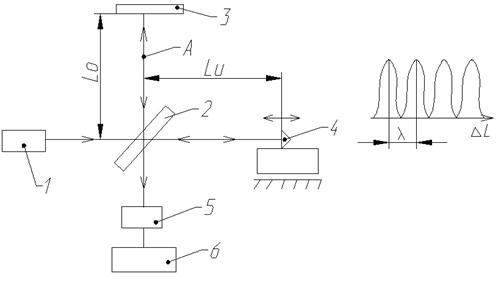
Рисунок 4 - Оптическая схема лазерного интерферометра.
1 – лазер, 2 – полупрозрачное зеркало, 3 – неподвижное отражающее зеркало, 4 - отражатель, установленный на перемещающейся детали, 5 – фотоприемник, 6 – электронное устройство обработки данных.
Луч, выходящий из маломощного гелий-неонового лазера расщепляют полупрозрачным зеркалом на два луча – опорный и измерительный. Опорный луч А проходит оптический путь от зеркала 2 до зеркала 3 и далее к фотоприемнику 5. Измерительный луч В идет к отражателю, установленному на перемещаемой детали, а затем возвращается и попадает в фотоприемник. В итоге оба луча встречаются и интерферируют в фотоприемнике. Регистрируемая фотоприемником интенсивность света зависит от разности длин оптических путей обоих лучей.
Δl = Lи – Lo. (4)
Предположим, что в какой-то момент времени оба луча, опорный и измерительный, встретились в одинаковой фазе. Значит, в этот момент времени фотоприемник зарегистрирует максимум интенсивности света. Но если деталь вместе с отражателем 4 начинает двигаться, длина измерительного пути Lи тоже начинает меняться. Как только Δl изменится на половину длины волны света, генерируемого лазером, сложение лучей в фотоприемнике будет происходить в противофазе и фотоприемник зарегистрирует минимальное излучение – «темноту». Еще на воловину длины волны изменяется путь измерительного луча и в фотоприемнике опять светло, очередная половина длины волны – опять темно. И т.д. – светло-темно, светло-темно.
Таким образом, при изменении Δl на λ/2 интенсивность света в фотоприемнике изменяется от максимума до минимума или наоборот. Если при перемещении отражателя сменились N раз, это означает, что деталь (суппорт) переместилась на расстояние λN/2. Число N подсчитывает электронное устройство 6. Таким образом, перемещение детали измеряется в длинах волн.
С помощью лазерных интерферометров измеряют перемещения от сотых долей мкмк до нескольких десятков метров.
На практике лазерный интерферометр обычно работает в комплекте с устройством программного управления станком. Поэтому одновременно с контролем перемещения осуществляется их автоматическая коррекция.
1 – рабочая головка (тубус); 2, 3 – каретки; 4 – зеркала; 6 – измерительные головки; 7 – разделитель; 8 - лазер; 9 – призма.

Рисунок 5 - Схема координатного стола с лазерным интерферометром.
На рисунке 5 изображена схема координатного стола с лазерным интерферометром. У такого стола на верхней каретке установлены два взаимоперпендикулярных зеркала, представляющие собой подвижные плечи интерферометров. На тубусе рабочей головки установлены два зеркала неподвижных или интерферометров.
Таким образом, интерферометры отсчитывают взаимные перемещения по двум осям верхней каретки относительно неподвижной системы координат. Зеркала могут быть изготовлены с достаточно высокой плоскостностью, укладывающейся в десятые доли мкм. В процессе эксплуатации они не изнашиваются, так что заложенные в них точности сохраняются длительное время. Для обеспечения взаимной перпендикулярности зеркал с точность до долей угловых секунд используются специальные оптические приемы. Точность работы координатного стола в значительной степени зависит от точности работы интерферометров. На точность отсчета перемещений влияют два фактора - нестабильность частоты излучения лазера и изменение длины волны излучения от колебаний окружающей температуры, давления, влажности. Проблема стабилизации частоты лазерного излучения в настоящее время почти решена, кроме того возможна коррекция погрешности за счет информации от датчиков температуры, давления, влажности с помощью ЭВМ.
ЛИТЕРАТУРА
1. Проектирования радиоэлектронных средств: Учеб. пособие для вузов /О.В.Алексеев, А.А.Головков, И.Ю.Пивоваров и др.; Под ред. О.В.Алексеева. – М.: Высш. шк., 2000. – 479 с.
2. Технология радиоэлектронных устройств и автоматизация производства: Учебник/ А.П. Достанко, В.Л.Ланин, А.А. Хмыль, Л.П. Ануфриев; Под общ. ред. А.П. Достанко. – Мн.: Выш. шк., 2002
3. Справочник конструктора РЭА: Общие принципы конструирования/ Под ред. Р.Г. Варламова. - М.: Радио, 2000.