Кинематика зубчатых механизмов с неподвижными осями вращения
Для получения больших передаточных отношений применяются многоступенчатые передачи, составленные из нескольких простых зубчатых передач. Рассмотрим трехступенчатую передачу.
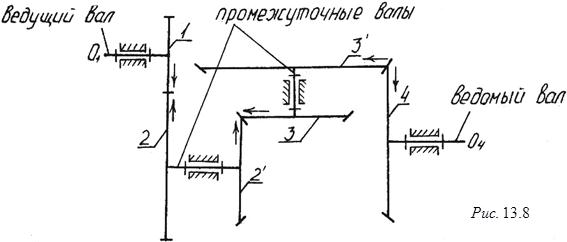
Передаточное отношение всего механизма равно
 (13.2)
(13.2)
апередаточное отношение отдельных ступеней –

Перемножим эти отношения:
 (13.3)
(13.3)
Сравнивая выражения (13.2) и (13.З), получим

т.е. передаточное отношение многоступенчатой передачи равно произведению передаточных отношений отдельных ступеней.
Колеса 1 и 4 вращаются в одну сторону. Таким образом,

Если все ступени являются цилиндрическими передачами, то в общем случае
 (13.4)
(13.4)
где n – число внешних зацеплений.
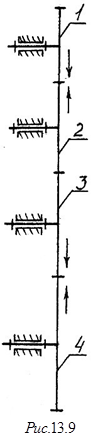
Частным случаем многоступенчатой передачи является ступенчатый ряд с промежуточными (паразитными) колесами (рис.13.9).
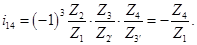
Промежуточные колеса не влияют на величину общего передаточного отношения, но могут изменять его знак. Такие передачи применяются для изменения направления вращения ведомого звена, а также в случае передачи вращения между удаленными валами. В общем случае
 (13.5)
(13.5)
13.4. Кинематика зубчатых механизмов с подвижными осями вращения
К механизмам с подвижными осями относятся механизмы, в составе которых имеется хотя бы одно колесо с перемещающейся в пространстве осью вращения (сателлит). Различают три вида таких механизмов:
1) дифференциальные
2) планетарные
3) замкнутые дифференциальные
Рассмотрим один из простейших дифференциальных механизмов (рис.13.10).Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н – водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
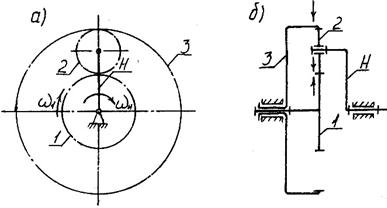

Получим формулу, связывающую угловые скорости звеньев в дифференциальном механизме. Используем метод обращения движения. Сообщаем всем звеньям механизма дополнительную угловую скорость, равную угловой скорости водила Н, но противоположно направленную, т.е. (  ). При этом относительное движение звеньев не изменится, а угловые скорости в обращенном движении будут следующими:
). При этом относительное движение звеньев не изменится, а угловые скорости в обращенном движении будут следующими:

Таким образом, так как  то дифференциальный механизм превратился в зубчатый механизм с неподвижными осями. Для такого обращенного механизма
то дифференциальный механизм превратился в зубчатый механизм с неподвижными осями. Для такого обращенного механизма
 (13.6)
(13.6)
где  – передаточное отношение обращенного механизма, определяемое через число зубьев колес:
– передаточное отношение обращенного механизма, определяемое через число зубьев колес:

Полученное выражение(13.6) называется формулой Виллиса. В общем случае формула Виллиса имеет вид

Если в дифференциальном механизме одно из центральных колес сделать неподвижным, то получится планетарный механизм (рис. 13.11).
 Так как
Так как  то из формулы
то из формулы
 получим:
получим:


 (13.7)
(13.7)
Выражение(13.7) называется формулой Виллиса для планетарных механизмов. В общем случае она имеет вид
 (13.8)
(13.8)
где индекс в соответствует неподвижному центральному колесу.
Планетарные механизмы часто называются планетарными передачами. Они позволяют получать большие передаточные отношения при малых габаритах.
Пример. Определить  если
если 

 (рис.13.12).
(рис.13.12).

На основании формулы (13.7) находим
