Краткие теоретические сведения.
ЛАБОРАТОРНАЯ РАБОТА № 2
Исследование работы элементов системы автоматического управления электровоза ВЛ 85.
1. Цель работы.
1) Изучение принципов построения систем автоматического управления электровоза ВЛ 85 в режиме тяги и электрического торможения;
2) Изучение конструкции и определение характеристик отдельных элементов САР электровоза.
Краткие теоретические сведения.
Система автоматического управления электровоза ВЛ 85 реализована в виде блока автоматического управления типа БАУ-250, представляет собой систему автоматического регулирования САР режимов тяги и рекуперативного торможения и позволяет выполнять управление электровозами по системе многих единиц. Она выполнена как многоконтурная система подчиненного регулирования, причем в режиме тяги она работает, как двухконтурная с контурами регулирования скорости и тока, а в режиме рекуперации - как трехконтурная с контурами регулирования скорости, силы торможения и тока возбуждения тяговых двигателей.
В режиме тяги САР обеспечивает:
• разгон электровоза до заданной скорости с заданным и автоматически поддерживаемым током якоря тяговых двигателей и последующим автоматическим поддержанием заданной скорости (при отсутствии уклона);
• плавное нарастание тока тяговых двигателей до заданного значения и ограничение по максимальному току якоря 1Ямах;
 • защита от боксования и короткого замыкания.
• защита от боксования и короткого замыкания.
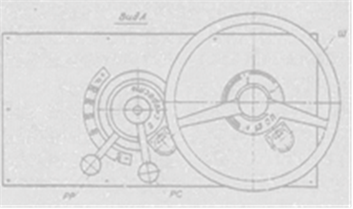
| Рис. 1. Контроллер машиниста электровоза BJI85 |
Схема собирается после установки штурвала Ш контроллера машиниста рис.1 в положение П. Скорость электровоза задают путем поворота рукоятки скорости PC контроллера. При этом в БАУ поступает сигнал, пропорциональный заданной скорости, а в кабину машиниста - на скоростемер. Ток якоря тяговых двигателей задают путем поворота штурвала контроллера машиниста в диапазоне НР-4 (начало регулирования - 4 зона регулирования ВИЛ)
Функциональная схема САР в режиме тяги представлена на рис.2 и имеет внутренний контур - тока якоря и внешний - скорости движения.
 Рис. 2. Функциональная схема САР
Рис. 2. Функциональная схема САР
Оба контура регулирования состоят из задающего элемента (задатчик тока якоря ЗТ и задатчик скорости ЗС), контроллера машиниста КМ, блока автоматического управления БАУ(элемент ИЛИ-min, регулятор скорости PC, блок выделения минимальной скорости БДС, задатчик интенсивности ЗИ, ограничитель максимального тока якоря Огр.1я, регулятор тока якоря РТЯ, согласующий элемент СЭ, блок выделения избыточного скольжения БВС и защиты от боксования БЗ), блока управления БУВИП; выпрямительно - инверторного преобразователя ВИД тягового трансформатора Т; тягового двигателя ТД; звеньев обратной связи - датчика тока ДТЯ и датчика скорости ТГС совместно с блоками измерений БИ-026 и БИ-027. Токовая защита включает в себя блоки токовой защиты и промежуточных реле БПР. Контур регулирования тока якоря тяговых двигателей работает по принципу стабилизации тока. При пуске постоянное напряжение от 0 до 50 В с контроллера машиниста КМ поступает в качестве заданных значений тока якоря (0-1450А) и скорости движения (0-110 км/час ) в блок БАУ Задание тока якоря в БАУ поступает на один из входов элементов ИЛИ - min, а на другой - сигнал с выхода регулятора скорости PC, который выполняет функции автоматического задатчика тока якоря для контура тока. Наименьшее значение из этих двух сигналов с выхода элемента ИЛИ -min поступает на вход задатчика интенсивности ЗИ, обеспечивающий плавное нарастание (с заданной интенсивностью) тока якорей тяговых двигателей до заданного значения.
Сигнал с выхода элемента ЗИ подается на вход ограничителя тока якоря Огр.1я (1450А), а затем на элемент сравнения ЭС2, где сравнивается с сигналом, пропорциональным фактическому значению максимального тока якоря, поступающего с блока измерений БИ-027
Блок измерений БИ-027 совместно с датчиками тока ДТЯ формируют напряжения, пропорциональные токам якорей тяговых двигателей, и выделяют напряжение, пропорциональное току наиболее загруженного тягового двигателя.
Сигнал рассогласования с выхода элемента ЭС2 поступает на регулятор тока якоря РТЯ и затем через согласующий элемент СЭ - в БУВИП.СЭ производит согласование уровней выходного сигнала БАУ и уровней входного сигнала БУВИП по каналу управления ВИП Блок БУВИП обеспечивает плавное четырехзонное регулирование выпрямленного напряжения на зажимах тяговых двигателей в режиме тяги и плавное изменение противо-ЭДС инвертора в режиме рекуперативного торможения и управление выпрямительной установкой возбуждения в режиме рекуперации.
При пуске, когда заданное значение скорости выше фактического, на выходе элемента ИЛИ -min будет проходить сигнал заданного значения тока якоря. При этом регулятор РТЯ будет поддерживать ток якорей тяговых двигателей на заданном уровне, т.е. обеспечивать движение электровоза с постоянной силой тяги.
В контуре регулирования скорости на регулятор PC подается сигнал с элемента сравнения ЭС1, на котором сравнивается заданное значение скорости от ЗС и фактическое значение скорости, поступающее с датчиков скорости ТГС через блоки измерений БИ-026 к блоку дифференциации скорости БДС. Блок БИ-026 предназначен для выпрямления напряжения с ТГС, пропорционального фактической скорости. Блок БДС служит для выделения сигнала, соответствующего минимальной в режиме тяги и максимальной в режиме рекуперативного торможения частоте вращения колесных пар.
Регулятор PC по рассогласованию заданного и фактического значений скорости вырабатывает сигнал, пропорциональный заданному значению тока якоря, для поддержания скорости движения состава в соответствии с заданным значением.
При разгоне, когда фактическое значение скорости будет приближаться к заданному, сигнал с выхода PC будет уменьшаться и при скорости электровоза, равной заданному будет равен нулю. Это приведет к тому, что на выходе элемента ИЛИ - min будет отсутствовать задание тока якоря и САР уменьшит ток до нуля.
Для защиты от боксования колесных пар в САР предусмотрен блок выделения избыточного скольжения БВС. Работа этого блока основана на сравнении интенсивностей приращения активной мощности, подведенной к тяговым двигателям (определяется сигналами от элементов СЭ и ДТЯ), и частоты вращения колесных пар (определяется сигналом ТГС). Сигнал с блока БВС поступает непосредственно на исполнительный элемент - блок защит БЗ, который воздействует по двум каналам : 1 - включение клапанов песочниц; 2 - уменьшение заданного тока якорей тяговых двигателей. Уменьшение заданного значения тока якорей происходит пропорционально скорости избыточного скольжения колесных пар до восстановления сцепления. После этого САР плавно увеличивает ток якорей тяговых двигателей до заданного значения, которое предшествовало боксованию.
Блок токовых защит БТЗ предназначен для защиты тяговых двигателей от аварийных токов в режиме тяги путем запрета (с помощью контактора К) на прохождение импульсов управления с БУВИП на все ВИП электровоза и управления промежуточным реле в блоке БПР, включающим сигнальную лампу СИ на пульте машиниста.
Для возврата БТЗ в исходное состояние необходимо штурвал контроллера машиниста КМ перевести в нулевое положение, при этом снимается запрет на прохождение импульсов управления с выхода БУВИП на тиристоры ВИП.
САР электровоза в режиме рекуперативного торможения схема обеспечивает:
• предварительное торможение;
• торможение до заданной скорости с заданной и автоматически поддерживаемой силой торможения с учетом ограничений тормозных характеристик (по мощности, по сцеплению, по условиям коммутации, по максимальной скорости) и последующим поддержанием заданной скорости (на спусках);
• остановочное торможение с заданной и автоматически поддерживаемой силой торможения. (При низких скоростях торможение осуществляется противовключением тяговых двигателей);
• плавное нарастание силы торможения до заданного значения;
• ограничение тока якорей тяговых двигателей (1000 А);
• ограничение тока возбуждения тяговых двигателей ( 880 А);
• защита от юза.
Подготовка к работе в режиме рекуперации начинают с установки реверсивно-режимной рукоятки РР контроллера машиниста в положении Р при нулевом положении штурвала. Схему собирают путем установки штурвала в положение П При этом замыкается цепь питания выпрямительной установки возбуждения (ВУВ) от сети постоянного тока напряжением 50 В.
Тормозное усилие задают с помощью сельсина В1путем поворота штурвала в диапазоне HP - 4 ( увеличение тормозного усилия ), скорость - с помощью сельсина В2путем поворота рукоятки скорости (рис.4).
Функциональная схема САР в режиме рекуперативного торможения (рис.З) представляет собой три замкнутых контура регулирования: контур
| Рис. 3. Функциональная схема САР в режиме рекуперации |

регулирования тока возбуждения, контур регулирования силы торможения и контур регулирования скорости движения. Контуры регулирования тока возбуждения и силы торможения - внутренние, контур скорости - внешний.
САР электровоза в режиме рекуперации в отличие от режима тяги дополнительно имеют блоки: ограничитель токов возбуждения ОгрЛви силы торможения Огр.СТпо условиям коммутации тяговых двигателей, регулятор силы торможения РСТ’, нелинейный преобразователь Ш7, регулятор тока возбуждения РТВ, защиты от юза БЗи датчик токов возбуждения Д ТВ.
Регулирование в режиме рекуперативного торможения осуществляют по двум каналам: регулирование противо - ЭДС инвертора по каналу ВИП и ЭДС тяговых двигателей по каналу ВУВ.В обоих случаях блок РСТ поддерживает заданное значение тока якоря тяговых двигателей с учетом ограничений. Разделение каналов регулирования обеспечивают соответст вующей настройкой НП При регулировании тока возбуждения от 0 до 825А НП работает в зоне нечувствительности и противо-ЭДС инвертора постоянна. Регулирование тока якоря в этом случае равносильно регулированию тормозной силы тяговых двигателей.
При токе возбуждения, равном 825А, нелинейный преобразователь выходит из зоны нечувствительности и в дальнейшем силу торможения регулируют изменением противо-ЭДС инвертора при постоянном токе возбуждения.
Контур регулирования скорости движения вступает в работу тогда, когда фактическая скорость электровоза станет равной или меньше заданного значения. При торможении регулируемое напряжение от 0 до 50В с КМ поступает в качестве заданных значений тока якоря (0 - 1000 А) и скорости ( 0 - 110 км/час) движения в блок БАУ.
Заданное значение тока якоря в блоке БАУ поступает на один из входов элемента ИЛИ- пип, на другой - сигнал с PC, который выполняет функции автоматического задатчика тока якоря для контуров регулирования токов возбуждения и силы торможения. Наименьший из этих двух сигналов поступает на элемент ЗИ, обеспечивающий плавное нарастание силы торможения (с заданной интенсивностью до заданного значения тока якорей тяговых двигателей) во всех режимах рекуперативного торможения: предварительного, остановочного и работы регулятора скорости.
Напряжение, пропорциональное заданному значению тока якорей тяговых двигателей, с выхода ЗИпоступает на вход Огр.1я (1000 А), затем на элемент сравнения ЭС2,где сравнивается сфактическим значением максимального тока якоря, который поступает с блока БИ - 027. Назначение последнего совместно с ДТЯописано выше.
Сигнал рассогласования тока якоря подается на вход РСТ, с выхода которого сигнал в качестве заданного значения тока возбуждения поступает на вход ограничителя Огр.1в (825 А), а затем на вход элемента сравнения ЭСЗ.В последнем он сравнивается с сигналом, соответствующем фактическому значению тока возбуждения, который поступает с БИ - 027.
Сигнал рассогласования тока возбуждения поступает на вход РТВ,выходной сигнал которого через СЭи блок БУВИП (канал ВУВ) управляет ВУВ
При торможении, когда ток возбуждения тяговых двигателей достигнет максимального значения, вступает в работу контур регулирования силы торможения, т.е. сигнал с регулятора РСТчерез НП, СЭи блок БУВИП начнет управлять фазой открытия тиристоров ВИП, уменьшая противо- ЭДС ВИП.
Когда фактическая скорость движения на спуске станет равной или меньше заданного значения в контуре регулирования скорости на PCпоступает сигнал с ЭС/, в котором сравниваются скорости заданная, поступающая с ЗС, и фактическая, поступающая с датчиков скорости ТГС через блоки измерений БИ - 026 и БДС. Назначение этих блоков описано выше.
Поддержание заданного значения скорости движения на спуске ведут по максимальному фактическому значению частоты вращения колесных пар. По рассогласованию заданного и фактического значений скорости движения на спуске регулятор PCвырабатывает сигнал, пропорциональный заданному значению тока якоря, для поддержания этой скорости. Канал ограничения максимальной силы торможения Огр.СТпо условиям коммутации тяговых двигателей работает при высоких скоростях движения от 110 до 80 км/час, если нарушается соотношение 1в >0,48 1я
Режим рекуперативного торможения всегда начинается с предварительного торможения, а САР в зависимости от скорости движения на спуске стремится поддержать заданную силу торможения на уровне 80 - 120 кН.
Для защиты от юза колесных пар предусмотрено устройство защит БЗи Б В С,принцип работы которых аналогичен работе САР электровоза в режиме тяги.
Схема электровоза также предусматривает ручное управление в пределах четырех зон регулирования.
В режиме тяги схему собирают также, как и при автоматическом регулировании. Ток тяговых двигателей регулируют путем поворота штурвала контроллера машиниста в диапазоне HP - 4. При этом задается зона регулирования и угол регулирования тиристоров ВИП. Рукоятка скорости не используется и может находиться в любом положении.
В режиме рекуперативного торможения схему собирают так же, как и при автоматическом регулировании. Тормозное усилие регулируют с помощью штурвала и рукоятки скорости контроллера машиниста. Рукоятку скорости непосредственно используют для регулирования тока возбуждения. Регулирование начинается поворотом рукоятки скорости из нулевого положения после перевода штурвала в положение HP. При достижении тока возбуждения максимального значения тормозное усилие увеличивают путем поворота штурвала из HP в. сторону положения 4.
Задающие элементы (ЗТи 30)в САР электровоза BJ185 - контроллер машиниста - должны иметь линейную выходную характеристику, зависимость выходного напряжения КМот угла поворота штурвала или руко ятки скорости Ueblxi((p), UeblX2((p). Для обеспечения этого при вращении рукоятки и повороте сельсинов В1 и В2 на валах скорости и штурвала имеются профильные шайбы специальной конфигурации. Расположение сельсинов В1 и В2 приведены на рис.4, кинематическая схема контроллера машиниста - на рис.5.
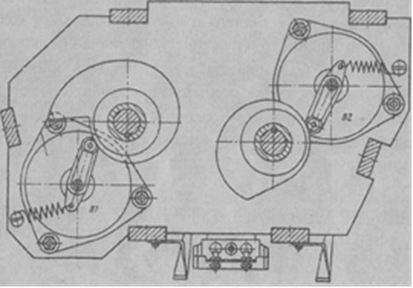
Рис. 4. Расположение сельсинов контроллера машиниста электровоза
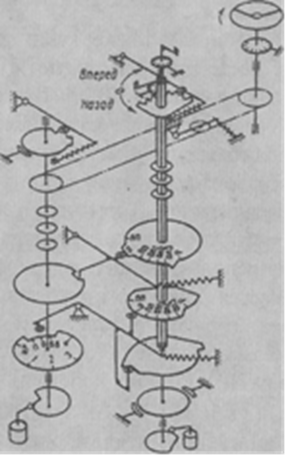
Рис. 5. Кинематическая схема контроллера машиниста