Статика. Метод виртуальных перемещений. Простые механизмы
Однако, поскольку энергия – это физическая величина, то процесс ее вычисления или измерения должен быть строго описан.Вот здесь и понадобится работа, поскольку начнем мы с механической энергии. По определению, механической энергией называется величина, изменение которой равно совершенной над системой механической работе.
Определение замкнутой системы: это система, в которую не проникает ничего извне. Если она удалена на очень большое расстояние от остального мира, то так и будет. Логическая хитрость этого определения в том, что все, что может проникнуть в систему извне, это тот или иной вид энергии. То есть, о замкнутости системы мы судим по тому, меняется ли ее энергия. Кажущийся логический круг в этом определении разрешается тем, что энергию нельзя определить через более общие понятия. Это самое общее физическое понятие.

А как вычислять работу, нам известно. Кстати, из этой формулы видно, что если работа над системой не совершается, то правая часть равенства обратится в ноль, и энергия E2 будет равна E1, то есть останется неизменной во времени. Правда есть маленькая хитрость. Даже если над замкнутой системой тел не совершается внешняя работа, ее механическая работа может уменьшаться за счет отрицательной работы внутренних сил. Например, сил трения. Механическая энергия системы уменьшается. Из принципа сохранения энергии следует, что должна возрастать энергия другого вида. Внутренняя. Так и происходит. Об увеличении внутренней энергии мы судит по нагреванию тел системы.
О наличии у тела механической энергии мы судим по способности тела совершить работу. Работу способно совершить движущееся тело (имеет кинетическую энергию), либо тело, находящееся в некотором силовом поле (потенциальная энергия поля, например, поля силы тяжести). Под действием сил поля тело может прийти в движение (приобрести кинетическую энергию), перейдя в другую точку пространства. Как пишет Фейнман, нельзя представлять энергию «в виде маленьких пилюль», запасенных в движущемся или поднятом на горку теле. Главное, что сумма этих энергий подчиняется закону сохранения (или изменения) энергии. То есть, энергия - это абстрактное понятие.
На примере поля силы тяжести, получим выражения для кинетической и потенциальной энергии. Пусть тело массы m лежит на поверхности земли. Медленно поднимем его по вертикали на высоту h. Мы совершили работу против силы тяжести. Наша сила была направлена вверх и равнялась mg, ну может самую малость побольше. Перемещение h тоже вверх, то есть наша работа положительна и по формуле равна mgh. Мы сделали систему «тело+земля» незамкнутой и добавили в нее энергию. Это и есть потенциальная энергия.После того, как мы удалились, она осталась у тела, поскольку оно оказалось в новом положении. Возвращаясь в исходное положение, оно «отдаст» эту энергию, поскольку сила тяжести совершит работу при падении тела, и эта работа силы тяжести пойдет на разгон тела, увеличение его кинетической энергии. Пусть тело затратит на падение время t. Поскольку мы знаем, что за каждую секунду скорость тела нарастает на одну и ту же величину, то есть изменяется равномерно со временем, можно считать, что средняя скорость на всем участке  Начальная скорость V1=0. Вспоминая, что V2=gt (за t секунд скорость возросла на gt), получим
Начальная скорость V1=0. Вспоминая, что V2=gt (за t секунд скорость возросла на gt), получим

Работа силы тяжести при падении тела (и уменьшение его потенциальной энергии) оказалось равным некоей физической величине, зависящей от массы тела и его скорости. Это и есть кинетическая энергия. Причем, это выражение справедливо для любого движения тела. Если придать соотношению следующий вид
мы получим закон сохранения энергии в виде
E1= E2
Здесь Е – механическая энергия системы «земля+тело». Она остается неизменной, если конечно, не учитывать трения о воздух. Связывать механическую энергию только с телом нельзя, поскольку непонятно, как в нем «запасается» потенциальная энергия. Потенциальная энергия всегда относится к паре взаимодействующих тел.
В реальности механическая энергия не будет сохраняться, часть ее перейдет в немеханические формы, поэтому E1> E2 и DE<0.
Принцип сохранения энергии дает важную информацию. В замкнутой системе невозможно возникновение дополнительной механической энергии из ниоткуда. Конечно, вы можете возразить, что она могла бы возникнуть из немеханических форм. Но просто так, «само собой», это не происходит. Вся теория двигателей – это многовековые исследования таких процессов. Если же ограничиться только механической энергией, то из «принципа невозможности получить энергию ниоткуда» (невозможность «вечного двигателя») можно ответить на вопрос: Сможет ли брошенный без начальной скорости шарик подпрыгнуть на высоту выше точки бросания?
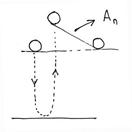
Простые рассуждения показывают, что если бы это было возможно, мы получили бы вечный двигатель. Шарик можно было бы вернуть в исходное положение, при этом совершить полезную работу, а затем повторить процесс заново.
Потенциальная энергия растянутой (или сжатой) пружины.
Попробуем вычислить потенциальную энергию растянутой пружины. Удлинение пружины (а не саму ее длину!) вдоль оси Х обозначим просто х.

А его небольшое изменение Dx=x2 –x1
Поскольку при удлинении пружины сила, с которой мы ее растягиваем, будет возрастать (она в каждый момент равна силе упругости F=kx, ну чуть побольше), то работу нельзя вычислить как A=Fx. Рассмотрим небольшое изменение удлинения пружины Dx. На протяжении Dx сила меняется незначительно, поэтому малая работа DA=FDx=kxDx.


Видно, что она почти равна площади заштрихованного прямоугольника, тем точнее, чем меньше Dx. Теперь становится ясно, чему равна полная работа по растяжению пружины от x=0 до x=x0. Это площадь всего треугольника. Она равна половине произведения катетов, то есть  . Если привязать к концу растянутой пружины грузик и отпустить, то силы упругости, против которых мы совершали работу при растяжении пружины, начнут совершать положительную работу над грузиком, и он начнет разгоняться. Его кинетическая энергия начнет возрастать, причем ее приращение будет в точности равно убыли потенциальной энергии пружины.
. Если привязать к концу растянутой пружины грузик и отпустить, то силы упругости, против которых мы совершали работу при растяжении пружины, начнут совершать положительную работу над грузиком, и он начнет разгоняться. Его кинетическая энергия начнет возрастать, причем ее приращение будет в точности равно убыли потенциальной энергии пружины.
Мы не знаем, что такое энергия.Но мы знаем точно (то есть пока не найдено опровержения этого факта), что полная энергия замкнутой системы сохраняется. Если в системе нет механизмов перевода механической энергии в другие ее виды (сил трения, пластических деформаций, ускоренных заряженных частиц и др.) то полная механическая энергия замкнутой системы сохраняется.Сразу нужно заметить, что в физике можно было бы обойтись без понятия энергии, это величина не наблюдаемая, ее нельзя измерить с помощью прямых измерений. Это математическая абстракция. Но мир устроен так, что именно такая комбинация измеряемых величин точно сохраняется. Поэтому в современной физике энергия является одной из универсальных величин. Энергией обладает любой рассматриваемый физикой объект (вещество, поле).
Одним из главных физических выводов, основанных на наблюдениях природы, явился вывод о невозможности получения механической энергии ниоткуда. Конечно, сейчас известны способы превращения иных форм энергии в механическую. Но эти формы энергии мы рассмотрим позднее. А пока обратимся, следуя Фейнману, к некоей механической машине, целью которой будет, например, поднятие более тяжелого груза за счет опускания более легкого. (Сам Фейнман придумал это рассуждение по аналогии с трудами Карно об обратимых тепловых машинах). Пусть наша машина поднимает три шарика на некоторую высоту х за счет опускания одного шарика на L.

Первоначально один шарик находился на высоте L, а три других – на высотах 0,х,2х. После опускания левого шарика, правые оказались на высотах х,2х,3х. Пусть наша машина работает без потерь энергии, сам рычаг тоже ничего не весит – то есть, наша машина идеальна. Чтобы она оказалась подготовлена к следующему циклу работы левый шарик нужно перекатить в положение правого нижнего (это можно сделать без затрат энергии – он не изменяет высоту), а правый верхний – в положение левого. Ну и опустить пустой рычаг, на что работы не требуется. Если 3x>L, мы выигрываем работу mg(3x-L) (правый шарик опускается), после чего система будет готова к следующему циклу. Вот и вечный двигатель! Значит неравенство 3x>L неверно. Может быть, 3x<L? Раз наша машина идеальна, ее можно заставить совершить процесс в обратном направлении

Видно, что при выполнении этого неравенства, машина также представляет собой вечный двигатель. Поэтому для идеальной машины 3x=L. Затраченная работа в точности равна полученной.
На этом утверждении базируется вся статика – наука о равновесии тел, условиях того, что они покоятся. Например, рычаг. Он будет находиться в равновесии при определенном соотношении масс на концах и длин плеч. Найдем условие равновесия.

Слегка повернем рычаг вокруг горизонтальной оси. Груз m1 опустится, и его потенциальная энергия уменьшится на m1gs1 . Если потенциальная энергия второго груза увеличится ровно на эту же величину, то кинетическая энергия грузов при этом перемещении не изменится. То есть, они не будут приходить в движение – система останется в покое, а перемещение в реальности не произойдет, оно мысленное (виртуальное). Хотя если мы в реальности повернем рычаг, то он перейдет в новое положение равновесия. Условие равновесия, полученное из условия, что полная работа силы тяжести равна 0, имеет вид
 или
или 
Из подобия треугольников 
 поэтому
поэтому 
Вот и правило рычага. Очевидно, две силы, приложенные перпендикулярно к концам рычага, будут уравновешивать друг друга, если между ним выполняется соотношение

причем они должны закручивать рычаг в противоположных направлениях. Произведение силы на плечо L называется моментом силы. Для равновесия тела необходимо, чтобы не только сумма всех сил, приложенных к нему, была равна 0, но и сумма моментов этих сил.Момент силы берется со знаком +, если сила закручивает тело против часовой стрелки, и со знаком - , если по часовой стрелке. В общем случае, плечом силы называется длина перпендикуляра, опущенного из точки закрепления рычага на прямую, вдоль которой действует сила.
 Рычаги первого и второго рода
Рычаги первого и второго рода

Разновидностью рычага является ворот.
Если систему тел удерживают в равновесии внешние силы, то вычислить их удобно следующим образом. Нужно придать системе малое перемещение, рассчитать работу внешних сил и приравнять ее к изменению потенциальной энергии системы. Таким же образом можно рассчитывать силы реакции, возникающие внутри системы, даже если реальные перемещения в системе невозможны (система жесткая). Вот почему этот принцип называется принципом виртуальных перемещений. Если работа внешней силы Fe на малом перемещении Dx равна изменению потенциальной энергии DWp, то

Поскольку изменение потенциальной энергии не что иное, как работа внутренних сил системы, а они противоположны по знаку внешним силам, для внутренних сил в системе

Применим ПВП к неподвижному и подвижному блокам.


В первом случае работа внешней силы FDx=mgDx. Поэтому F=mg для удержания или равномерного подъема груза на идеальном неподвижном блоке необходимо прикладывать силу, равную силе тяжести. Выигрыша в силе нет. Во втором случае подъем груза на Dx приводит к укорачиванию двух нитей, на которых висит подвижный блок каждой на Dx, поэтому правая нить удлиняется на 2Dx, что приводит к работе 2FDx= mgDx. Отсюда F= mg/2. Подвижный блок дает выигрыш в силе в два раза. Система подвижных и неподвижных блоков, называемая полиспастом, придуманная греками, может давать выигрыш в силе в десятки раз (Громов, Родина -7, стр 56, рис. 59)
 Наклонная плоскость позволяет поднимать тела силой, меньшей, чем при вертикальном подъеме. Рассмотрим наклонную плоскость вдоль гипотенузы прямоугольного треугольника со сторонами 3L, 4L, 5L.
Наклонная плоскость позволяет поднимать тела силой, меньшей, чем при вертикальном подъеме. Рассмотрим наклонную плоскость вдоль гипотенузы прямоугольного треугольника со сторонами 3L, 4L, 5L.

Какой груз необходимо использовать, чтобы уравновесить лежащий на плоскости груз 5m при отсутствии трения? Применим ПВП. Пусть груз 5m поднялся по плоскости, и его перемещение равно 5L. Неизвестный груз, висящий на нити, опустился на такую же высоту, совершив работу 5xgL. Но увеличение потенциальной энергии груза 5m составило 15mgL, поскольку он увеличил свою высоту на 3L. Приравнивая работы (что возможно лишь при отсутствии потерь на трение), получим 5xgL=15mgL, то есть x=3m. Стевин получил тот же вывод, рассматривая изящную систему, находящуюся в равновесии. Разновидностью наклонной плоскости является винт – можно сообразить, что это наклонная плоскость, навитая на цилиндр. Домкратпредставляет совокупность рычага и винта.
В жизни идеальных машин не бывает – это математические абстракции. Поэтому работа «на входе» машины (затрачиваемая) всегда больше работы «на выходе» (полезной). Часть затрачиваемой работы идет на преодоление сил трения  (последнее слагаемое всегда отрицательно). Поэтому отношение
(последнее слагаемое всегда отрицательно). Поэтому отношение  всегда меньше единицы. Эту положительную безразмерную величину называют коэффициентом полезного действия механизма (КПД). КПД идеальных машин равно 1. Именно идеальные машины обладают свойством обратимости. Если подать на выход такой машины силы, снимаемые с нее при прямом цикле (совершить обратный ход), то со входа мы будем снимать силы, в точности равные силам, подаваемым на вход на прямом цикле.
всегда меньше единицы. Эту положительную безразмерную величину называют коэффициентом полезного действия механизма (КПД). КПД идеальных машин равно 1. Именно идеальные машины обладают свойством обратимости. Если подать на выход такой машины силы, снимаемые с нее при прямом цикле (совершить обратный ход), то со входа мы будем снимать силы, в точности равные силам, подаваемым на вход на прямом цикле.
Пример. Сложный блок представляет собой два блока радиусов r и R, насаженные на общую ось. Они не могут вращаться друг относительно друга. На них закреплена веревка, на которой висит подвижный блок с грузом m. Какую силу F нужно приложить к рычагу длиной L, связанному с осью, чтобы система не двигалась?
 Решим задачу методом ВП. Вначале нужно сообразить, в каком направлении должна действовать сила. Если верхний блок вращается по часовой стрелке, то наматываться будет больше нити, чем сматываться. Груз будет подниматься. Для этого нужно прикладывать силу по часовой стрелке, для удержания в равновесии – в том же направлении. Пусть конец рычага при небольшом повороте сместился на Dx, тогда с правой части блока смотается длина нити, равная
Решим задачу методом ВП. Вначале нужно сообразить, в каком направлении должна действовать сила. Если верхний блок вращается по часовой стрелке, то наматываться будет больше нити, чем сматываться. Груз будет подниматься. Для этого нужно прикладывать силу по часовой стрелке, для удержания в равновесии – в том же направлении. Пусть конец рычага при небольшом повороте сместился на Dx, тогда с правой части блока смотается длина нити, равная  , на левую часть намотается
, на левую часть намотается  , таким образом, длина провисающей нити уменьшится на
, таким образом, длина провисающей нити уменьшится на  и груз поднимется на
и груз поднимется на  . Приравнивая увеличение потенциальной энергии работе внешней силы
. Приравнивая увеличение потенциальной энергии работе внешней силы  , получим величину
, получим величину 