Общая характеристика Измерительных Преобразователей.
Схема измерения, стабилизации параметров в зоне А
Физико-технические свойства пространства.
Тема 1. Назначение, место и роль Измерительных преобразователей (ИП) и датчиков (Д) в структуре производственно-технологических отношений.
Задачи курса
VIII. Вступление
VII. Тема 7. Демпфирующие устройства.
VI. Тема 6. Опоры и подвесы ЧЭ ИП и Д.
V. Тема 5. Интегрированные узлы и элементы ИП и Д на основе кварцевых и кремниевых структур.
IV. Тема 4. Датчики сил и моментов сил. Механические и электромеханические преобразователи. Преобразователи вида энергии в составе ИП. Обратные преобразователи.
Получение студентами базовых знаний о назначении Мосте и роли измерительных преобразователей (ИП) неэлектрических величин, приборов и датчиков в инфраструктуре , в составе технических систем различного назначения.
Ознакомление с физическими основами, особенностями конструкторских решений и с ролью элементов ИП и Д в формировании информации заинтересованным потребителям, в первую очередь, применительно к задачам управления движением подвижных объектов и навигации.
Обретение практических навыков исследования, расчета и проектирования элементов ИП и Д с учетом конкретики их применения в задачах объектов различного класса.
(вернуться к оглавлению)
Навигация – это наука о законах движения центра масс объекта, перемещающихся из одной точки пространства в другую точку по желаемой траектории в заданное время при минимальных энергозатратах.
Для того, что бы решить физико-техническую задачу нужно знать потребность, которую необходимо обеспечить в результате решения сформулированной задачи.
Для этого требуется знание ограничения, в рамках, в границах которых будет решаться задача. В частности, необходимо знать, по возможности, объективные свойства окружающего пространства и характерные ориентиры, отражающие эти свойства, которые могут быть смоделированы на борту и служить базой отсчета. Какие конкретные параметры, доступные для наблюдения, измерения, моделирования, характеризуют интересующие нас свойства окружающего пространства и какие из них мы можем и должны обеспечить в замкнутом пространстве А подвижного объекта.
Рис. К вопросу моделирования базовых ориентиров.
Надо найти способ моделирования объективных параметров пространства в области А, на борту подвижного объекта. Важно обеспечить максимально близкое соответствие модели базового ориентира самому объективному ориентиру пространства. От этого зависит качество решаемой задачи (точность, безопасность, экономичность, временные факторы и др.).
1. Для этого надо обладать знанием законов пространства.
2. Возможностью измерения и моделирования этих параметров. Сравнивать текущие параметры пространства с параметрами моделей в искусственно созданной области пространства и устранять возникающие рассогласования.
3. Измерять пространственную ориентацию осей ЛА относительно приборных моделей базовых ориентиров и управлять их положением в соответствии с решаемыми задачами.
Рис. Схема формирования команды управления
Рис. Система стабилизации параметра в области – А
Для решения этой общей задачи мы должны располагать измерительными преобразователями. Основным узлом любого преобразователя является чувствительный элемент, который непосредственно воспринимает контролируемую величину.
(вернуться к оглавлению)
Акселерометр(измеряет кажущееся ускорение)
На рис. Представлена обобщенная структура электромеханическтого измерительного преобразователя (ИП)
|

Рис. Обобщенная структура ИП
Позициями на Рис. обозначены:
ЧЭ - чувствительный элемент. Узел ИП, непосредственно воспринимающий измеряемый, контролируемый параметр физический среды и преобразующий его в промежуточный параметр в ИП в форму удобную для последующего анализа. В акселерометре это масса m, в гироскопических устройствах – кинетический момент  .
.
Чаще всего входное воздействие на ЧЭ преобразуется в перемещение ЧЭ или деформацию элементов конструкции.
ПММ - передаточно-множительный механизм. Преобразует механическое смещение в механическое смещение иного диапазона, масштаба. Например, с использованием редуктора (в прецизионных ИП практически не применяется). В интегральных ИП это может быть упругий элемент в виде консольной балки, в которой точки приложения инерционной силы и «наблюдаемая» с помощью ДП точка упругой балки не совпадают. Здесь скрытно представлена передаточная функция ПММ.
КЗ –колебательное звено. Включает динамические звенья (инерционное, демпфирующее, позиционное), смещение которого - X2преобразуется в электрический сигнал в ДП.
ДП или ДУпреобразователь механического смещения ЧЭ (линейного или углового) в электрический сигнал - U1. Это прямой преобразователь вида энергии (механической, запасаемой в ЧЭ, в электрическую).
УС - усилитель - преобразователь, усиливает сигнал U1 по напряжению – U2 и по мощности, обеспечивая его сопряжение с потребителями информации и с системой отображения (СО). В его состав может включаться преобразователь аналогового сигнала в цифровой эквивалент с помощью аналого-цифрового преобразователя (АЦП).
СО - система отображения информации.
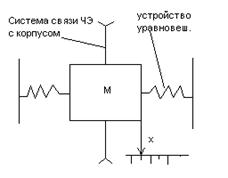
Кинематическая схема акселерометра
 |
|

| |||||
| |||||
| |||||
(доработать рисунок или взять со стр. 17)
Рис. Кинематическая схема
На рис. обозначены основные конструктивные элементы и их взаимная кинематическая связь.
Условие динамического равновесия ЧЭ может быть записано в виде:
 .
.
В установившемся режиме имеем:
- 
- 
Т.е, смещение x ЧЭ относительно корпуса пропорционально измеряемой компоненте ускорения ax.
Здесь: - kд – коэффициент демпфирования (демпфер не показан);
- с – жесткость упругих связей ЧЭ с корпусом.
2. Параметры ориентации и навигации.
Координаты центра тяжести ЛА относительно земли.