Виды управления рулевыми электроприводами
Структурная схема следящего управления рулевым электроприводом
Структурная схема простого управления рулевым электроприводом
Основные сведения
Нического и электрогидравлического рулевых приводов
Структурные схемы управления судов с использованием электромеха
Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством – сервомеханизмом.
В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель.
В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель - серводвигатель, связанный через кинематическую передачу с манипулятором насоса.
Весьма часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя.
Напомним, что при простом управления в качестве органов управления используют кнопки «Лево руля», «право руля» или рычаг управления ( «джостик» ).
Руль перекладывается все то время, пока нажата одна из кнопок или рычаг вы
веден из нейтрального положения. Перекладка прекращается, если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение.
Об угловом состоянии руля в каждый момент времени судят по рулевому указателю - аксиометру.
Обобщенная разомкнутая схема ручного управления рулем по времени показана на рис. 10.17.
Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили
тель; СР - серводвигатель; У - электрический усилитель.

Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
При простом управлении рулем контур регулирования разомкнут. При подаче управляющего напряжения U последовательно отрабатывают все звенья и начинается перекладка руля.
последовательно отрабатывают все звенья и начинается перекладка руля.
Шток поршня гидроусилителя ГУ жестко связан с манипулятором насоса Н. Перемещение манипулятора ограничено. Поэтому пропорциональность между движением золотника гидроусилителя и ходом его поршня характерна только при сравнительно малых перемещениях.
При снятии управляющего напряжения Uсерводвигатель СР останавливается, но подача насоса Н не прекращается.
Для остановки руля необходимо, чтобы серводвигатель включением в обратную сторону сместил манипулятор насоса в исходное положение. Таким образом, разовая перекладка руля содержит четыре операции:
1. включение серводвигателя;
2. его остановку;
3. включение серводвигателя в обратном направлении;
4. его остановку.
Поворот руля на заданный угол описанным способом даже опытному оператору ( например, рулевому матросу ) выполнить практически невозможно.
Для нормальной работы требуется, чтобы при снятии входного управляющего сигнала U= 0 серводвигатель занимал исходное положение, что соответствует прекращению подачи масла на рулевую машину.
В некоторых современных отечественных схемах управления (АТР, АИСТ) это делается специальным пружинным нуль-установителем, задача которого вернуть серводвигатель или, точнее, золотник гидроусилителя ГУ в нулевое положение ( е = 0) после отключения.
= 0) после отключения.
Иностранные фирмы часто используют сервопривод с электромагнитным управлением. Золотник такого привода всегда имеет пружинный самовозврат.
Таким образом, простое управление рулем по структурной схеме рис.10.17 принципиально возможно.
Для этого требуется только, чтобы элементы сервопривода автоматически возвращались в исходное положение после отключения серводвигателя.
Напомним, что при следящем управления в качестве органа управления используют штурвал поста управления в рулевой рубке.
При повороте штурвала на определенный угол в необходимую сторону ( влево или вправо относительно нулевого положения ) перо руля повернется на такой же ( или пропорциональный ) угол и автоматически остановится.
Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением штурвала, отсюда название – следящее управление.
При этом угол поворота пера руля тем больше, чем больше угловое расстояние ( угловой путь ) , описанное штурвалом, отсюда второе название – управление по пути.
Из сказанного следует, что у каждому положению штурвала после отработки соответствует определенное положение руля.
Таким образом, следящее управление является полуавтоматическим – на первом этапе управления участвует человек ( поворачивает вручную штурвал ), на втором этапе используются элементы автоматики ( сельсин-датчик руля в румпельном отделении ), обеспечивающие автоматическую ( без участия человека ) остановку руля.
Аксиометр является средством дополнительного контроля положения руля.
Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.16 ) через соответствующие преобразующие устройства.
Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью.
Широко распространены схемы (рис. 10.18 ), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.

Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
Образование внутреннего следящего контура превращает интегрирующее и апериодическое звенья, характерные для гидравлического привода, в обобщенное колебательное звено, передаточная функция которого имеет следующий вид:

где К — коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
— коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
Решение характеристического уравнения, соответствующего данной передаточной функции , показывает, что при соблюдении условия 4T KK
KK K< 1 оба корня уравнения будут отрицательными и вещественными, поэтому движение руля при управления со стороны сервопривода будет носить апериодический характер.
K< 1 оба корня уравнения будут отрицательными и вещественными, поэтому движение руля при управления со стороны сервопривода будет носить апериодический характер.
При обратном соотношении в рулевом электроприводе возникают автоколебания, т.е. перо руля даже в отсутствие управляющего сигнала совершает самопроизвольные колебания влево-вправо по отношению к диаметральной плоскости судна.
Для подавления автоколебаний в схему управления рулевым электроприводом вводят отрицательную обратную связь по выходному напряжениию, при помощи которой часть сигнала ( напряжения ) с выхода оконечного каскада усилителя подают в противофазе на вход усилителя.
В результате коэффициент усиления усилителя по напряжению ( а значит, и по мощности ) уменьшается, но достигается главное – исчезают автоколебания пера руля.
При подаче сигнала αна вход суммирующего устройства А баллер руля повернется на соответствующий угол α.
Таким образом, задача следящего управления рулем превращается в задачу синфазного поворота поста управления ПУ и выходного органа сервомеханизма (СР, ГУ) α.
Общая схема следящего управления рулем распадается на два независимых замкнутых контура I и II.
Поворот поста управления ПУ на некоторый угол вызывает перемещение выхода сервомеханизма на тот же угол, что в свою очередь определит угол перекладки руля. Элементы К и К
и К являются преобразователями углового поворота в эквивалентные электрические сигналы.
являются преобразователями углового поворота в эквивалентные электрические сигналы.
При углах перекладки α = α-а > 5°, поворот манипулятора насоса ограничивает-
> 5°, поворот манипулятора насоса ограничивает-
ся (ε  ).
).
Движение же задающего органа αможет продолжаться из-за наличия специаль-
ной аккумулирующей пружины. Следовательно, при больших углах перекладки насос работает с максимальной подачей и начинает снижать ее за 5° до подхода к заданному положению.
При разомкнутом контуре II возможно простое управление рулем.
Постом управления непосредственно на вход усилителя подается управляющий сигнал. Серводвигатель СР через ГУ или, в случае его отсутствия, через кинематический механизм перемещает на некоторый угол αзадающий элемент, угол поворота которого после отработки определит положение руля.
Контроль перекладки производится по двухстрелочному аксиометру заданного и действительного положения руля. Датчики аксиометра связаны соответственно с заданным αи фактическим α углами поворота пера руля. Отключение серводвигателя производится по достижении αтребуемого значения.
Рассмотренные решения по обеспечению устойчивости работы системы управления рулевого электропривода (см. рис. 10.18) не являются единственно возможными. За последнее время появились новые структурные схемы управления рулем (АТР, АИСТ), где для обеспечения структурной устойчивости в следящем и автоматическом режимах обратной связью охватывается не рулевая машина, а серводвигатель (рис. 10.19 ).
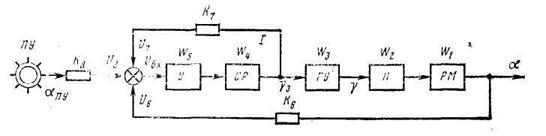
Рис. 10.19. Структурная схема управления РЭГ-приводом с электрической обратной связью
Эти схемы комплектуются аксиально-поршневыми насосами типа IIД. Поворот люльки насоса осуществляется встроенным гидроусилителем, управление которым производится поворотным золотником. Поэтому выход от серводвигателя СР имеет не линейное, а угловое перемещение γ.
Передаточная функция эквивалентного звена внутреннего контура найдется так:

Этой передаточной функции соответствует характеристическое уравнение второго порядка. Вещественные и отрицательные корни этого уравнения определяют условия устойчивости контура и отсутствие колебательных процессов в динамическом режиме.
Численно эти условия выразятся неравенством 4T KK
KK K<1.
K<1.
Повышению устойчивости способствует снижение постоянной времени сервопривода. Поэтому в схемах такого рода наиболее широко применяются двухфазные асинхронные электродвигатели с полым ротором, имеющие малый маховой момент.
Увеличение коэффициента усиления усилителя повышает точность обработки, но отрицательно сказывается на устойчивости.
При работе в следящем режиме общий сигнал, подаваемый на вход усилителя, состоит из трех составляющих:
U= U- U- U,
где U- напряжение, пропорциональное повороту α поста управления;
поста управления;
U- напряжение, пропорциональное перемещению γзолотника гидроусилителя;
U- напряжение, пропорциональное углу α поворота пера руля.
В согласованном положении, когда α = 0, U= 0 (γ= 0, насос не имеет подачи) U= U. При задании перекладки перемещением поста управления равновесие U= Uнарушается (например, U> U).
Люлька насоса поворачивается, появляется напряжение U, которое стремится компенсировать утраченное равновесное состояние.
При малых углах перекладки ( до 5° ) Uуравновешивает U, и серводвигатель в этом случае останавливается.
По мере поворота руля происходит увеличение U, так что сумма (U+ U) становится больше U. Серводвигатель изменяет направление вращения. Насос уменьша-
ет подачу. В новом согласованном положении U= 0, равновесие восстанавливается U= = U.
Поворот золотника гидроусилителя γне превышает 15 - 30°. При учете масштаб-
ных соотношений, принятых в схеме формирования управляющего сигнала U, это соответствует углу поворота руля 5 - 10°.
Поэтому при перекладке на большие углы после выхода насоса на максимальную подачу параметр Uсохраняет постоянное значение, соответствующее принятому пре-
дельному повороту золотника γ.
Суммарное напряжение U+ Uне уравновешивает задающее Uи на серводвига-
теле СР образуется положительный управляющий сигнал. Серводвигатель развивает вращающий момент.
В то же время золотник гидроусилителя достиг конечного положения и его дальней
ший поворот невозможен.
Для облегчения теплового режима работы серводвигателя в кинематической связи между ним и золотником предусматривается пружинная муфта проскальзывания .
При подходе к заданному положению ( α = 4 - 5°) серводвигатель останавливается, и в дальнейшем обратным вращением уменьшает подачу насоса от максимальной до нуля, так же как и при перекладке на малые углы.
По характеру формирования управляющего сигнала различают 4 вида управления рулевыми приводами:
1. простое;
2. следящее;
3. автоматическое;
4. аварийное.
При простом управлении используют кнопки «Лево руля», «Право руля» или вер-
тикально расположенный рычаг ( «джостик» ), который можно наклонять влево или впра-
во.
При нажатии какой-либо кнопки или наклоне рычага начинается перекладка руля. Для остановки руля надо отпустить нажатую кнопку или вернуть рычаг в вертикальное положение.
Таким образом, кладка пера руля продолжается все то время, пока нажата кнопка или наклонен рычаг. Поэтому этот вид управления называют управлением по времени.
Для возврата руля в прежнее положение ЭД реверсируют нажатием другой кнопки или наклоном рычага в противоположную сторону.
Положение руля определяется визуально по шкале рулевого указателя ( аксио-
метра ).
В этой системе при перекладке руля в сторону от диаметральной плоскости и об-
ратно следует осуществить 4 операции ( на примере рычага ): перекладку рычага в сторо-
ну ( например, вправо ), возврат его в среднее положение, перекладку в обратную сторону ( влево ) и возврат опять в среднее положение.
При следящем управлении используют штурвал. При повороте штурвала, напри-
мер, вправо на определенный угол, начинается перекладка пера руля. При повороте пера руля на угол, заданный штурвалом, перо руля остановится автоматически. Таким обра-
зом, перо руля как бы следит за поворотом штурвала, отсюда название – «следящее управ
ление».
Поскольку угол поворота пера руля равен ( или пропорционален ) углу поворота штурвала, этот вид управления называют управлением по пути ( пройденному штурвалом при его повороте ).
Штурвал механически связан со стрелкой, указывающей заданное положение руля. После отработки руль автоматически перекладывается на требуемый угол, что может быть проверено по аксиометру. В некоторых случаях указательные стрелки задан
ного и действительного положений руля работают на общую шкалу совмещенного ( сдвоенного ) аксиометра.
Для перекладки руля к борту и обратно рулевому нужно совершить только 2 опе
рации: переложить штурвал на нужный угол и вернуть его в нулевое положение. У Следящее управление значительно проще и удобнее, требует меньшей затраты физических сил и внимания.
При автоматическом управлении удержание судна на курсе осуществляется авто-
матически, без участия человека. Предварительно рулевой матрос, по команде вахтенного помощника ( старшего помощника, капитана ) выводит судно на необходимый курс, используя простое или следящее управление.
После этого, в момент, когда судно на заданном курсе, а перо руля - в диаметраль-
ной плоскости, переключатель видов управления на тумбе рулевого устройства переводят в положение «Автоматическое управление» ( «Автомат» ).
На судах с центральной ЭВМ автоматическое управление предполагает задание угла перекладки руля по определенной программе, разрабатываемой автоматически судовым счетно-вычислительным комплексом ( составной частью центральной ЭВМ ) в зависимости от решаемых навигационных или иных задач.
В настоящее время на транспортных судах применяют наиболее простые рулевые автоматы, обеспечивающие автоматическую стабилизацию судна на заданном кур-
се.
Применение авторулевых позволяет:
1. сократить численность экипажа;
2. за счет уменьшения углов кладки руля увеличить среднюю скорость судна и
уменьшить путь, проходимый судном ( в среднем на 2,5-3% по сравнению с ручным уп-
равлением ).
Внимание!
Современные авторулевые при работе на «Автомате» позволяют изменить курс судна в нужную сторону простым поворотом штурвала, без перехода на следя-