ОПРЕДЕЛЕНИЕ ЦЕНТРА ДАВЛЕНИЯ ГУСЕНИЧНЫХ МАШИН
Величина D зависит только от конструктивных параметров автомобиля. Отношение Pк/Ga называется динамическим фактором (Д.Ф.), который представляет собой отношение тяговой силы Pк на ведущих колесах к весу машины Ga (D – это удельная сила тяги, приходящаяся на единицу веса машины).
ДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА И ДИНАМИЧЕСКИЙ ПАСПОРТ
Графики Д.Х. очень удобны при сравнении динамических качеств нескольких типов машин. Пусть Pкр =0, тогда уравнение (54) можно записать в виде: Pк - Pw=Pψ ± δ∙j∙Ga / g или, разделив это равенство на величину Ga, получим:
[(Pк-Pw)/Ga]=[(Pψ±δ∙j∙Ga/g) / Ga]= ψ ± δ∙j/g=D (60)
Для лесовозных машин можно принять Pw =0, тогда: D=Pк/Ga= ψ± δ∙j/g (61)
 |
При равномерном движении машины: D=ψ . Зависимость динамического фактора от скорости движения на разных передачах называется динамической
б)
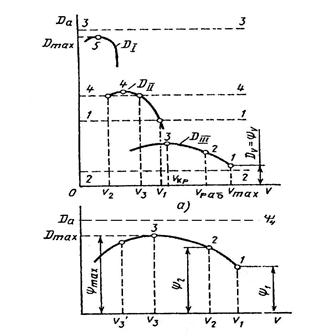
Рисунок 6 Динамическая характеристика автомобиля
характеристикой автомобиля – рисунок 6.
Рассмотрим характерные точки динамической характеристики, приводимые в технических характеристиках автомобиля - рисунок 6.
1.D1– Д.Ф. на высшей передаче, соответствующий максимальной скорость автомобиля на дороге с ψ = 0.015 - точка 1.
2.D2– динамический фактор на прямой передаче при скорости, которая наиболее характерна для данного типа авто vраб  (0.4..0.5) V
(0.4..0.5) V - точка 2.
- точка 2.
3.D΄max – максимальное значение динамического фактора на высшей передаче и соответствующее ему значение скорости υкр. Эту точку находят проведением касательной параллельно оси абсцисс к кривой Д на прямой передаче - точка 3.
4.D4– динамический фактор на промежуточных передачах, характеризующий способность автомобиля к преодолению длительных подъемов - точка 4.
5.Dmax – динамический фактор на низшей передаче, характеризующий максимально преодолеваемое дорожное сопротивление - точка 5.
Значение динамичекого фактора при максимальной скорости определяет величину дорожного сопротивления, которое может быть при этой скорости преодолено. Максимальный динамический фактор - Dmax характеризует величину наибольшего дорожного сопротивления ψmax, преодолеваемого машиной при равномерном движении на первой передаче. На графике динамической характеристики в масштабе динамического фактора – D – можно откладывать величину коэффициета суммарного сопротивления дороги ψ. Для определения максимальной скорости движения автомобиля по той или иной дороге на динамическую характеристику необходимо нанести линию, представляющую заданное сопротивление дороги ψ. При этом возможно несколько случаев:
1. Если линия ψ пересекается с кривой D (11-D11); то максимальная скорость равна υ1, т.к. при этой скорости соблюдается условие D=ψ - рисунок 6а.
2. Если кривая D проходит выше линии ψ (22-D111) -рисунок 6а, то равномерное движение при полной подаче топлива в цилиндры невозможно, т.к. D даже на высшей передаче во всем диапазоне скоростей больше ψ. Избыток D приводит к разгону автомобиля.
3. Если D < ψ (D -33), то движение с постоянной скоростью при таком значении ψ невозможно, и автомобиль может двигаться только замедленно.
-33), то движение с постоянной скоростью при таком значении ψ невозможно, и автомобиль может двигаться только замедленно.
4. Если линия ψ пересекает кривую D в двух точках (44-D11), то автомобиль при полном открытии дроссельной заслонки может двигаться равномерно как со скоростью υ , так и со скоростью υ
, так и со скоростью υ . Для равномерного движения со скоростью большей υи меньшей υ, необходимо уменьшить мощность двигателя, прикрыв дроссельную заслонку. У существующих грузовых автомобилей средней и большой грузоподъемности наибольшие значения D находятся в пределах: для первой передачи– 0.32 - 0.42; для прямой передачи– 0.05…0.06. Для автопоездов значение соответственно уменьшается: для первой передачи – 0.20…0.25; для прямой – 0.03…0.05.
. Для равномерного движения со скоростью большей υи меньшей υ, необходимо уменьшить мощность двигателя, прикрыв дроссельную заслонку. У существующих грузовых автомобилей средней и большой грузоподъемности наибольшие значения D находятся в пределах: для первой передачи– 0.32 - 0.42; для прямой передачи– 0.05…0.06. Для автопоездов значение соответственно уменьшается: для первой передачи – 0.20…0.25; для прямой – 0.03…0.05.
По динамической характеристике легко решается и обратная задача: определение суммарного сопротивления дороги, преодолеваемого автомобилем при движении с заданной скоростью. Для этого на динамической характеристике определяют величину D при указанной скорости и тем самым находят коэффициент ψ. Так, например, при скорости υ1, коэффициент суммарного сопротивления дороги ψ, а при υравен ψ2 - рисунок 6 б.
Точка 3 (D΄max) на высшей передаче соответствует скорости vкр,, которая делит весь диапазон изменения скорости на высшей передаче на две зоны - зону утойчивого движения и зону неустойчивого движения. Проверим это на примере рисунка 6 б.
Пусть автомобиль движется по бетонной дороге с ψ1. Автомобиль движется равномерно и развивает D1=ψ1, педаль акселератора выжата до упора. Бетонная дорога закончилась, начался асфальт с ψ2. D1 < ψ2. Автомобиль автоматически снижает скорость. Скорость будет снижаться до тех пор пока D не станет равным ψ - D2=ψ2. При этом подача топлива остается постоянной. И машина движется устойчиво и равномерно, но уже со скоростью υ . Закончился асфальт, началась грунтовая дорога с ψ3. D2 < ψ3. Автоматически скорость автомобиля уменьшается, а D возрастает и скорость будет уменьшаться до тех пор пока D не станет равным ψ3 - D3=ψ3= Dmax - рисунок 6 б.
. Закончился асфальт, началась грунтовая дорога с ψ3. D2 < ψ3. Автоматически скорость автомобиля уменьшается, а D возрастает и скорость будет уменьшаться до тех пор пока D не станет равным ψ3 - D3=ψ3= Dmax - рисунок 6 б.
Автомобиль начнет двигаться устойчиво и равномерно (подача топлива остается постоянной), но уже со скоростью υ3.
Закончилась грунтовая дорога, началась песчанная с ψ4. D3 < ψ4. Автомобиль снижает скорость и динамический фактор уменьшается, и чтобы избежать остановки, водитель должен искуственно увеличить динамический фактор - перейти на низшую передачу, увеличивая значение Д.Ф. и тем самым сохраняя устойчивое движение.
Т.О., при υ  υ3 движение машины устойчивое
υ3 движение машины устойчивое , а при υ
, а при υ  υ3 - неустойчивое. Поэтому скорость υ3 называется критической скоростью по условиям тяги.
υ3 - неустойчивое. Поэтому скорость υ3 называется критической скоростью по условиям тяги.
С помощью Д.Ф. можно определять углы подъема преодолеваемые автомобилем.
Угол подъема для каждой передачи может быть найден из соотношения:
ψ=ѓCosα±Sinα=D (62)
или D=ѓ(1-Sin2α) + Sinα
+ Sinα
Тогда Sinα=[D-ѓ(1-D2+ѓ2) ] / (1+ѓ2) (63)
] / (1+ѓ2) (63)
Динамические характеристики могут быть также использованы для определения времени и пути разгона машины. Способность машины к быстрому разгону называется приемистостью (машины). Из равенства (60) можно определить величину ускорения j=(D-ψ)∙g/δ, которое при ψ=const зависит только от D и δ.
Известно, что j=dυa/dt, тогда
dt=dυa/j (64)
откуда время разгона машины от скорости υ΄a до υa определится:
υa
T= ∫ (1/j)dυ΄a (65)
υ΄a
Рассмотренными тяговыми и динамическими характеристиками пользуются при исследовании динамических качеств автомобиля и автопоездов, колесных транспортно-трелевочных тягачей и других машин подобного типа. Для тихоходных тракторов тяговые характеристики строятся в зависимости от Pкр, т.к. основным параметром у них является сила тяги на крюке. Динамический паспорт представляет собой совокупность динамической характеристики, номограммы нагрузок и графика контроля буксования -рисунок 8. Динамический паспорт автомобиля позволяет решать уравнение движения с учетом большего числа факторов: конструктивных параметров автомобиля (Me, iтр и т.д.), основных характеристик дороги (ψ, φ) и нагрузки на автомобиль, что послужило причиной широкого использования динамического паспорта при расчетах движения автомобиля. Динамическую характеристику строят для автомобиля с полной нагрузкой, равной его грузоподъемности. С изменением веса от Ga до Go величина D изменяется и становится равной:
Dо = Da(Ga/Go) (66)
Чтобы не пересчитывать Д.Ф. при каждом изменении нагрузки, динамическую характеристику дополняют номограммой нагрузок - рисунок 7. Из равенства (66) нетрудно заметить, что во сколько раз увеличивается вес машины G во столько раз уменьшается D.
 |
Пусть Dх – при новом весе Gх автомобиля. Тогда Dх=D(G/Gх). Таким образом, зная вес и D нагруженного автомобиля и вес его в любом состоянии Gх определим и Dх для этого состояния. Итак, строим динамический паспорт. Продолжаем влево ось абцисс. На продолжении оси абсцисс откладываем отрезок произвольной длины и наносим шкалу нагрузки в % (для грузовых автомобилей) или по числу пассажиров (для легковых автомобилей и автобусов). Начало отрезка принимаем за 0 % нагрузки.
Рисунок 7 Динамическая характеристика с номограммой нагрузок
Через нулевую точку шкалы нагрузок проводим прямую параллельно оси Dа, и на ней наносим шкалу Do для автомобиля без нагрузки. Величину масштаба аo для шкалы Do определяем:
аo=аа(Go/Gа) , (67)
где аа – масштаб шкалы Д.Ф. для автомобиля с полной нагрузкой;
Go – собственный вес автомобиля в снаряженном состоянии, в который включают и вес водителя, Н.
Пусть аа = 100 мм, которым соответствует 0,1 или 0,05 Dа..
Тогда полученное значение аo будет соответствовать 0,1 (0,05) Do.
Равнозначные деления шкал Do и Dа (например, 0.05; 0.1; и т.д.) соединяют между собой прямыми линиями. Наклонные линии на номограмме нагрузок обычно проводят через “круглые” (кратные 5) значения D. Поэтому при расчетах промежуточные значения D определим интерполированием. Определим, например, какому значению D соответствует точка А при 90 % нагрузки - рисунок 7.
Наклонные линии на рисунке 7 проведены через каждые 0.05 динамического фактора. Точка А находится между линиями, которые соответствуют значениям D =0.20 и 0.25. Чтобы определить величину D при данной нагрузке с точностью около одной сотой, разделим отрезок АВ на 5 частей (по числу делений на шкалах Do и Dа). Точка А находится примерно на третьем делении выше линии 0.2, следовательно, в данном случае D = 0.23. Номограмма нагрузок позволяет решать все указанные выше задачи не только для случая полной нагрузки автомобиля, но и для любого промежуточного ее значения.
Определим, например, максимальное значение ψ при нагрузке автомобиля равной 40 % и движением его со скоростью 90 км/ч (25 м/с). Для этого через точку υа = 90 км/ч проведем вертикальную линию до ее пересечения с кривой D, а через точку пересечения горизонтальную линию влево. Через заданное значение нагрузки (40 %) проведем вертикальную линию до пересечения с полученной горизонтальной линией и по точке их пересечения определим искомое значение D, которое в данном случае равен 0.048.
Следовательно, и ψmax при указанных условиях также равно 0.048. При определении максимально возможной скорости автомобиля задачу решают в обратном порядке.
Пусть заданы нагрузка H = 80 % и ψ = 0.14. Проведя вертикальную линию через заданное значение H, отложим на ней величину ψ и проведем через полученную точку горизонтальную линию до пересечения с кривой D. Абсцисса точки их пересечения и будет представлять собой искомую скорость, равную 25 км/ч (7 м/с).
Для определения максимальной нагрузки H на определенной передаче при известных значениях ψ и υа проводят вертикальную линию через заданную скорость до пересечения с кривой D на данной передаче. Из полученной точки влево проводят горизонтальную линию до пересечения в точке В с наклонной прямой, соответствующей заданному значению ψ. Вертикальная линия, опущенная из точки В на шкалу нагрузки, укажет на ней значение H. Так, при υа около 47 км/ч (13 м/с) и ψ = 0.10 нагрузка будет равна 20 % - рисунок 7.
ГРАФИК КОНТРОЛЯ БУКСОВАНИЯ ПРЕДСТАВЛЯЕТ СОБОЙ ВЫРАЖЕН НУЮ ГРАФИЧЕСКИ ЗАВИСИМОСТЬ ДИНАМИЧЕСКОГО ФАКТОРА ПО СЦЕПЛЕНИЮ Dсц ОТ НАГРУЗКИ И ПОЗВОЛЯЕТ ОПРЕДЕЛИТЬ ВОЗМОЖ НОСТЬ БУКСОВАНИЯ ВЕДУЩИХ КОЛЕС.
Этот график строится в следующей последовательности.Вначале по формулам, приведенным ниже, определяют значение динамического фактора по сцеплению для автомобиля без нагрузки Doсц и с полной нагрузкой Dсц для различных значений j. Dсц=j∙Gсц / G а (68)
Doсц =j∙Gосц/Gо , (69)
где Gосц - вес, воспринимаемый ведущими колесами автомобиля без нагрузки. Первое построение производят для j = 0.1 (или 0,05). Затем значение Dсц откладывают на шкале Dа номограммы нагрузок в масштабе аа – рисунок 8. , а значение Doсц в масштабе аo - на шкале Dо, и полученные точки соединяют прямой штриховой линией над которой указывают величину коэффициента j (0.1 или 0,05). Так же определяют положение точек и наносят штриховые линии для других значений j (0.2; 0.3;…0.8 и т.д.).
 |
Пользуясь графиком контроля буксования, можно учесть также ограничения, накладываемые на движение автомобиля сцеплением ведущих колес с дорогой. Например, можно определить значение j, необходимое для движения с заданными значениями нагрузки и скорости или с заданными величинами нагрузки и коэффициента ψ. В первом случае поступают так же, как при определении величины D (по известным значениям нагрузки H и скорости υa), только вместо величины D по сплошным наклонным линиям, определяют значение Dсц по штриховым линиям.
Рисунок 8 Динамический паспорт автомобиля
Так при скорости υa = 90 км/ч и нагрузке H = 80% коэффициент j = 0.12 (точка А). Во втором случае проводят вертикальную линию через известное значение нагрузки H и откладывают на ней значение коэффициента ψ, после чего по наклонным штриховым линиям определяют значение j. Так, при нагрузке H = 40 % и коэффициенте ψ=0,2, коэффициент j = 0.325 (точка В). Также можно определить максимальное значение ψ и υa при известных величинах H и j или определить H и υa при известных значениях ψ и j. Так при нагрузке H = 70% и j = 040 (точка С) коэффициент ψ ≈ 0.27. При таком значении автомобиль может двигаться лишь на первой передаче, причем для равномерного движения дроссельная заслонка должна быть прикрыта. Если же сопротивление дороги не лимитирует движения автомобиля, то он может двигаться с любой скоростью, вплоть до максимальной (более 100 км/ч). При коэффициентах y = 0.3 и j = 0.5 (точка Е) автомобиль может двигаться только с загрузкой Н=30% со скоростью 42 км/ч (12 м/с).
МОЩНОСТНОЙ БАЛАНС
Для анализа динамических свойств автомобиля, можно вместо соотношения сил использовать сопоставление тяговой мощности Nк с мощностью, необходимой для преодоления сопротивления движению. Аналогично тяговому балансу можно записать и мощностной баланс автомобиля и трактора (для общего случая движения): Ne=Nтр+Nѓ+Ni+Nw+Nкр+Nj+Nδ+Nпр+N вом (70)
где Nтр - мощность, затрачиваемая на преодоление сопротивлений трения в трансмиссии;
Nѓ - мощность, затрачиваемая на преодоление сопротивлений качению
колес или гусениц машин;
Ni - мощность, затрачиваемая на преодоление сопротивлений подъему;
Nw - мощность, затрачиваемая на преодоление сопротивлений воздуха;
Nкр - мощность, расходуемая на тягу прицепов, волочение деревьев и др;
Nj - мощность, затрачиваемая на разгон поступательно-движущихся масс;
Nδ - мощность, теряемая в процессе буксования ведущих органов;
Nпр - мощность, затачиваемая на механические потери в приводе вала от
бора мощности (ВОМа);
Nвом - мощность, затрачиваемая на вращение механизмов, присоединен
ных к ВОМу.
Если буксование движителя незначительно и им можно пренебречь равенство (70) с учетом равенства (4) можно записать:
Nк=Ne∙hтр=Nf±Ni+Nw+Nkp±Nj+Nпр+Nвом, (71)
где Nк=Nе - Nтр - мощность, подводимая к ведущим органам.
Анализируя равенство (70) замечаем, что развиваемая двигателем мощность расходуется на полезную работу (Nкр и Nвом) и на неизбежные потери.

 |
а
Рисунок 9 График мощностного баланса автомобиля а и трактора б
Полезная мощность на крюке машины определяется:
Nкр=Pкр∙υ / 1000 (72)
где υ - действительная скорость движения машины.
Неизбежные потери мощности двигателя при работе машины определяются:
Nѓ= Pѓ∙ѓ/1000=ѓ∙G∙Cosa∙υ/1000 (73)
Ni=Pi∙υ/1000 (74)
Nw=Pw∙υ/1000 (75)
Nj=Pj∙υ/1000 (76)
Nd=d∙Nk (77)
Изобразим графически мощностной баланс для автомобиля с 4-х ступенчатой коробкой передач - рисунок 9 а.
Из графика, очевидно, что автомобиль может устойчиво двигаться со скоростью υ΄a только на IV передаче. Пересечение линий (Nк-Nw) и (Nѓ2-Ni2) в точке С означает, что мощность суммарного сопротивления дороги NY2 при указанных ѓ2, i2 и υ΄a соответствует развиваемой двигателем мощности Ne за вычетом мощности, затрачиваемой на трение в трансмиссии (отрезок АВ) и на преодоление сопротивления воздуха (отрезок ВС). Если ѓ=ѓ1 и i=i1 - кривая Nѓ проходит ниже и налицо запас мощности (отрезок СД), который может быть использован для разгона машины.
Для тракторов и тягачей, как отмечалось выше, основным параметром является Pкр - сила тяги на крюке, развиваемая ими. Поэтому для них чаще всего строят графики тяговых характеристик и мощностного баланса в функции Pkp. Графически мощностной баланс для трактора можно представить – рисунок 9б. Ординаты жирноочерченной кривой изображают мощности Nкр, остающиеся после вычета всех потерь для реализации на крюке. Они изображают тяговый КПД трактора, если отрезок Ne принять за hтяг= 100 %.
Полученная кривая Nкр=ѓ(Pкр) названа потенциальной тяговой характеристикой трактора, потому что может быть достигнута лишь при идеальных предпосылках – автоматическом бесступенчатом регулировании скорости движения трактора и постоянной загрузке ДВС на полную мощность Ne.Из графика очевидно, что с увеличением Pкр увеличивается и буксование δ, а соответственно увеличивается мощность Nδ, затрачиваемая на буксование.
Это сказывается на величине Nкр. В указанном случае мощностной баланс может быть записан в виде: Ne=Nтр+Nѓ+Nкр+Nδ (78)
Если принять, что КПД трансмиссии не зависит от ее передаточного числа, то очевидно,что наибольшее значение Nкр зависит от соотношения Nδ и Nѓ, зависящих в свою очередь от степени буксования δ, значения скорости трактора и коэффициента ѓ. Чем больше Nкр, тем меньше затраты мощности на трение в трансмиссии, на буксование и самопередвижение трактора.
Равенство hтяг=Nкр / Ne называется тяговым КПД трактора и является одним из главных параметров оценки качества машины.
ПРОХОДИМОСТЬ ЛЕСОТРАНСПОРТНЫХ МАШИН
1. Критерии проходимости
В силу специфики условий работы лесотранспортные машины часто перемещаются по неблагоустроенным дорогам, усам, волокам, а это предъявляет повышенные требования к проходимости этих машин.
Единого критерия, позволяющего достаточно полно оценивать проходимость, еще не существует. Установлено, что проходимость зависит от многих параметров машины, основными из которых являются опорно-тяговые качества и геометрические параметры, а также конструкции отдельных элементов трансмиссии: дифференциала, коробки передач и т.д. Кроме того, на проходимость влияют и такие свойства машины, как устойчивость и маневренность.
Под проходимостью машины понимают ее способность устойчиво двигаться по плохим дорогам или в условиях полного бездорожья, сохраняя при этом достаточную (по условиям работы) среднюю скорость без разрушения или допустимом разрушении структуры лесной почвы. По проходимости все автомобили делятся на три группы. В основу классификации принимается соотношение между общим числом колес автомобиля и числом его ведущих колес, которое принято выражать колесной формулой. Эта формула состоит из 2-х цифр: первая – общее число колес, вторая – число ведущих (ЗИЛ-130 – 4х2; ГАЗ 66 – 4х4; ЗИЛ 131 – 6х6) и т.д. К первой группе относятся автомобили ограниченной (нормальной) проходимости – типов 4х2 и 6х2. Ко второй – повышенной проходимости типов 4х4, 6х6, 6х4. К третьей – высокой проходимости, имеющие специальную компоновку или конструкцию типа 8х8, а также полугусеничные.
Существует несколько методов оценки проходимости, основными из которых являются: метод длительных сравнительных испытаний и метод эталонного маршрута.
На трелевке и вывозке леса широкое применение нашел первый метод: выбираются маршруты с различным типами дорог. В качестве оценок проходимости служат средняя скорость движения, расход топлива, частота и длительность буксования, число переключений передач и т.д.
Метод эталонного маршрута состоит в сравнительной оценке нагрузок, скоростей движения и расходов топлива у машины при работе на эталонном (труднопроходимом) участке и на хорошей дороге.
В качестве обобщающего показателя проходимости автомобиля, НАМИ предложил “фактор проходимости” для подсчета которого следует использовать равенство:
П=[Qм∙Sм/(tм∙gем)]:[Qш∙Sш/(tш∙gеш)] (79)
где Qм и Qш - полезные нагрузки при движении по труднопроходимому маршруту и шоссе;
Sм и Sш - длина испытательного участка по труднопроходимому маршруту и шоссе;
tм и tш - время движения по труднопроходимому маршруту и шоссе;
gем и gеш - расход топлива во время движения по труднопроходимому маршруту и шоссе.
Чем больше фактор проходимости, тем лучше проходимость.
Проходимость машин в первую очередь оценивается опорно-тяговыми показателями, к которым относят:
1. Удельное давление шин или гусениц на опорную поверхность.
2. Совпадение у колесных машин ширины колеи передних и задних колес.
3. Максимальная сила тяги на низшей передаче.
4. Распределение веса между передней и задней осями колесных машин и сцепление с почвой.
Увеличение удельного давления машины на грунт вызывает углубление прокладываемой колеи, рост сопротивления качению и может привести к застреванию машины. Поэтому на автомобилях II и III групп давление в шинах для повышения проходимости по слабым грунтам делается регулируемым. Величина удельного давления колес автомобиля на дорогу:
Pуд=Gк/F ,
где Gк - вес, приходящийся на колесо автомобиля, (Н);
F - площадь контакта колеса с дорогой, (м2).
Сопротивление движению машины существенно зависит от деформации грунта, т.е. от ширины и глубины оставляемой колеи, которая в свою очередь зависит от совпадения следов, оставляемых передними и задними колесами. Минимальные деформации грунта (сопротивление движению) будут при точном совпадении следов.
Для оценки совпадения следа передних и задних колес служит коэффициент совпадения следа ηс.
ηс = a / b ,
где a - ширина следа, оставляемого передним колесом;
b - суммарная ширина следа переднего и заднего колеса (неплотный грунт).
Необходимым условием движения машины без буксования является:
Pѓ ≤ Pкmax ≤ Pсц (80)
или
ѓ∙Ga ≤ (Me∙iтр∙ηтр/rд)max ≤ φ∙Gсц
или
ѓ ≤ [Me∙iтр∙ηтр/(Gа∙rд)]max ≤ φ∙σ , (81)
где σ = (Gсц / Gа) – коэффициент сцепного веса.
Для машин 6х2 – σ ~ 1/3; 4х2, 6х4 - σ ~ 2/3; 4х4, 6х6 и гусеничных - σ = 1.
Таким образом, проходимость колесной машины зависит от распределения ее веса между передними (ведомыми) и ведущими осями, т.е. улучшается с увеличением σ.
Кроме того, как показали испытания и практика эксплуатации уменьшение скорости движения улучшает проходимость машин. При движении по мягким грунтам очень важно не допускать интенсивного буксования, когда колеса и гусеницы начинают зарываться в грунт. При движении с небольшой скоростью машина движется более осторожно, не срывает верхнего покрова грунта и меньше буксует. Поэтому тип трансмиссии машин оказывает влияние на их проходимость. Движение машины с малой скоростью при механической трансмиссии происходит при пробуксовке сцепления, что приводит к быстрому выходу его из строя. Чтобы этого избежать применяют гидромуфты или гидротрансформаторы, обеспечивающие длительное движение с малой скоростью и улучшающих проходимость машины. К геометрическим параметрам проходимости относятся: величина дорожного просвета (клиренс); радиусы продольной и поперечной проходимости; узлы въезда (наклона передней и задней ветвей гусеницы) машины; радиус горизонтальной проходимости - рисунок 10.
 |
Клиренс (на рисунке 10 не указан) – расстояние (наименьшее) от точек нижнего контура шасси машины или ее днища до поверхности пути, без погружения движителя в грунт. У современных трелевочных тракторов клиренс делают не менее 500 мм, у автомобилей порядка 250…350 мм. Увеличение клиренса повышает центр тяжести машины и снижает ее устойчивость.
Рисунок 10 Геометрические параметры проходимости
Радиусы продольной и поперечной проходимости влияют на проходимость машины при преодолении пней, валунов, бугров и др. неровностей. Для их уменьшения сокращают базы машин или увеличивают клиренс. На рисунке 10-а показаны углы въезда, имеющие значение при движении через рвы.
Радиус горизонтальной проходимости определяет размеры площади, на которой может повернуться машина и в какой-то мере характеризует ее маневренность (способность пройти между деревьями, по горным дорогам и т.д.). Необходимое свободное пространство для поворота трелевочного трактора определяется длиной транспортной системы и зависит от способа транспортировки деревьев.
При трелевке в полупогруженном состоянии длина системы составляет:
L ≈ Lт + Lд-lд (82)
где Lт - длина трактора;
Lд - длина пакета;
lд - длина части деревьев, находящихся на тракторе.
При транспортировке же в полностью погруженном положении L ~ Lд.
Проходимость колесных транспортных систем
Глубина колеи зависит от жесткости грунта, величины нагрузки, размеров, формы и жесткости шины. Чем жестче шина, тем глубже погружение колеса и тем больше остаточные деформации грунта. Снижением жесткости колеса можно уменьшить глубину колеи, но при этом возрастут затраты на деформацию шины. Деформация пневматической шины при данной нагрузке зависит от давления воздуха в ней и жесткости каркаса. Таким образом, изменение одного из параметров шины сказывается благоприятно на величине сопротивлению качению, но снижает коэффициент сцепления. Уменьшение давления в шине и увеличение поверхности контакта увеличивают φ, но резко снижают срок службы шины и др. Как показали опыты, сопротивление качению колеса зависит от глубины колеи и от потерь на деформацию шины. Сопротивление от деформации исследуемого колеса незначительны при перекатывании его по жесткому покрытию, что с уменьшением давления в шине сопротивление перекатыванию возрастает. Это происходит из-за большей деформации материала покрышки.
Сопротивление качению от деформации грунта во много раз превышает сопротивление от деформации шины. Продолжительное движение на шинах с пониженным давлением воздуха приводит к их усиленной деформации и быстрому износу. При нормальной эксплуатации радиальная деформация шины не должна превышать 12%. Многочисленные опыты показали, что на дорогах с твердым покрытием давление в шине следует держать 0,3 МПа при любом состоянии дороги (мокрая или сухая). На мягком грунте 0,2 МПа, а на снегу или песке 0,15 МПа. В отдельных случаях для преодоления сильно заснеженного перегона можно понижать давление до 0,1 МПа, но с последующим повышением. Арочные шины также повышают проходимость машин.
Проходимость гусеничных систем
Оценивая проходимость гусеничных машин общего назначения, ограничиваются величинами среднего удельного давления гусениц на грунт и клиренса. В силу специфики условий работы трелевочных тракторов этих параметров недостаточно для оценки их проходимости. Поэтому вопрос проходимости лесозаготовительных машин с грузом находится в прямой зависимости от выбора параметров гусеничного движителя. Увеличение удельного давления приводит к росту расхода мощности на движение машины и уменьшение клиренса. Среднее удельное давление трактора на грунт определяется зависимость:
qср=Gт / (2b L) , (83)
где Gт - вес трактора;
b - ширина звена гусеницы;
L- длина опорной поверхности гусениц.
Для современных трелевочных тракторов qср ~ 0.04…0.05 МПа.
При таком q во время движения по снегу машина будет образовывать глубокие колеи. Поэтому иногда конструкторы стремятся уменьшить удельное давление на грунт. Однако это сопряжено с уширением гусеницы, что приводит к увеличению веса трактора. Экспериментально (ЦНИИМЭ) была предложена зависимость, связывающая глубину снежного покрова H, значение дорожного просвета K и ширину гусеницы b (см): b ≤ 1.4 (H-K) (84)
Эта зависимость указывает, что проходимость машины по снегу можно улучшить не только уширением гусеницы, но и увеличением клиренса, за счет увеличения диаметра опорных катков. В последнее время ведутся попытки увеличения проходимости путем уширения гусеницы, ликвидации прессования снега и грязи в углублениях звеньев, в направляющих и ведущих колесах.
На проходимость гусеничных машин существенно влияет неравномерность распределения нагрузки по длине опорной поверхности гусеницы, в результате чего действительное удельное давление во много больше среднего. Для лучшей проходимости желательно равномерное распределение нормальных давлений по длине гусеницы. Кроме того, для лучшей проходимости необходим постоянный контакт опорных катков с нижней ветвью гусеницы. Одним из главных преимуществ гусеничного движителя является его высокие сцеп ные качества, зависящие от величины удельного давления, длины опорной поверхности, высоты и формы грунтозацепов, их размещения и. т. д.
ОПРЕДЕЛЕНИЕ ОПОРНЫХ РЕАКЦИЙ КОЛЕСНЫХ МАШИН
Величины нормальных реакций грунта на колеса машины и изменение их под воздействием внешних сил и моментов существенно влияют на тягово-сцепные свойства, устойчивость и управляемость машины. Так, у тракторов с задними ведущими колесами сила тяги на крюке, перераспределяя нагрузки на оси машины, увеличивает ее сцепной вес.
В то же время чрезмерная разгрузка передних колес может привести к нарушению управляемости машин. Рассмотрим случай равномерного движения трак тора с задними ведущими колесами на подъеме: для одиночного неподвижного трактора на горизонтальной плоскости Z1 и Z2 определятся - рисунок 11:
Z1ст=Gт∙a / L (85)
Z2ст=Gт(L-a) / L (86)
 |
Рисунок 11 Схема для определения нормальных реакций грунта на колеса машины
При движении на подъем α и наличии силы тяги на крюке реакция Z1, определяется равенством моментов всех сил относительно точки B - рисунок 11 :
Z1=[Gт∙a∙Cosα-Gт∙h∙Sinα-Pкр∙(hкр∙Cosγ+lкр∙Sinγ) - Mѓ]/L (87)
Сумма проекций всех сил на продольную плоскость, перпендикулярную поверхности дороги, равна: Z1+Z2=Gт∙Cosα + Pкр∙Sinγ (88).
Откуда находим:
Z2=[Gт∙(L-a)∙Cosα +Gт∙h∙Sinα+Pкр∙hкр∙Cosγ + Pкр∙(L+lкр)∙Sinγ+Mѓ] / L (89)
При γ=0, т.е. Pкр действует параллельно дороге, равенства (87) и (89) упрощаются: Z1=[Gт∙a∙Cosα - Gт∙h∙Sinα - Pкр∙hкр - Mѓ] / L
Z2=[Gт∙(L-a)∙Cosα + Gт∙h∙Sinα + Pкр∙hкр + Mѓ] / L
Снижение нагрузки на передних колесах вызывает соответствующее увеличение на задних. Конструктивные параметры h, L, a, hкр и другие существенно влияют на распределение нагрузки и продольную устойчивость. Обычно на тракторах типа 4х2 (МТЗ-5, Т-40 и др.) для увеличения сцепного веса центр тяжести располагают ближе к оси задних колес и для неподвижной машины Z2=(0.6…0.7)Gт. А это ухудшает и продольную устойчивость и управляемость трактора. Чтобы избежать этого применяют тракторы со всеми ведущими колесами. В этом случае перераспределение нагрузок на оси не сказывается на величине сцепного веса, который равен сумме реакций Z1+Z2. У колесных тракторов типа «Тимберджек» на переднюю ось неподвижного трактора приходится до 2/3 его веса. При определении реакции у автомобиля движущегося с большой скоростью необходимо учитывать силу Pw, располагаемую для предварительного расчета в центре тяжести машины. При неравномерном движении необходимо учитывать Pj - силу инерции поступательно движущихся масс машины. Реакции грунта на колеса 3-х осных авто определяется методами статики, прилагая сумму реакций на средние и задние колеса к оси балансира, а затем с учетом плеч балансира определяют реакции на колеса. Если мосты (опорные катки) подвешены к раме независимо друг от друга, задача становится статически неопределимой. В этом случае вводят дополнительное уравнение деформации рессор. Из последних 2-х уравнений следует, что нормальные реакции дороги при движении автомобиля отличаются от реакции, действующих на колеса неподвижного автомобиля. Реакция на передние колеса уменьшается, а на задние - увеличивается с увеличением крутизны подъема, интенсивности разгона, а также с увеличением сил сопротивления.
Чтобы оценить во сколько раз изменились реакции Z1 и Z2 во время движения по сравнению с вертикальными нагрузками G1 и G2 в статическом состоянии машины, введят понятие о коэффициенте изменнения реакций. Коэффициент изменения реакций m представляет собой отношение нормальной реакции, действующей на ось при движении машины, к реакции, действующей на ту же ось машины, стоящей на горизонтальной дороге:
m1=Z1 / Z1ст ; m2=Z2 / Z2ст
При разгоне машины наибольшее значение коэффициентов изменения реакций находятся в следующих пределах: для передней оси m1=0.65…0.7; для задней - m2=1.2…1.35. Приведенные значения коэффициентов свидетельствует о том, что во время разгона нагрузка на переднюю ось машины уменьшается, а на заднюю – увеличивается по сравнению с нагрузками при статическом положении автомобиля. При торможении машины происходит обратное явление. Этим объясняется подъем передней части автомобиля наблюдаемый при разгоне, и наклон ее вниз (клевок) при торможении.
Рассмотрим общий случай прямолинейного движения гусеничного трактора с прицепом на подъем -рисунок 12. В этом случае на трактор в продольно-вертикальной плоскости действуют следующие внешние силы и реакции:
 |
Рисунок 12 Схема для определения смещения центра давления
1.Gт - Вес трактора.
2.Тяговое сопротивление на крюке Pкр: сила Pкр перенесена в условную точку прицепа и разложена на две составляющие PкрCosαPкр и PкрSinγ.
3.Реакции почвы, параллельные поверхности пути: сила тяги Pк и сила сопротивления качению Pѓ.
4.Реакция Z, нормальная к поверхности пути; она является результирующей всех нормальных реакций почвы, действующих на отдельные звенья гусениц.
Назовем точку приложения результирующей нормальной реакции грунта Z центром давления (ц.д.)трактора и будем обозначать ее буквой Д. В общем случае центр давления не совпадает с серединой опорной поверхности гусениц.
Продольное расстояние от указанной середины до центраа давления назовем смещением центра давления и обозначим xd. Для определения величины xd запишем равенство моментов действующих на трактор внешних сил и реакций относительно точки Д - рисунок 12 :
Gт(xd-ao)Cosα-GтhSinα-PкрhкрCosγ - Pкр(b+a-ao-xd)Sinγ = 0 , (90)
где a – продольная координата ц.т. трактора относительно геометрической оси ведущих колес гусеницы;
ao – продольный вынос ц.т. трактора относительно опорной поверхности гусениц; ao>0, если ц.т. вынесен вперед; ao<0 – назад;
h и hкр – вертикальные координаты соответственно ц.т. и условной точки прицепа;
b – продольная координата точки прицепа относительно оси ведущего колеса гусеницы.
Решая последнее равенство относительно xd, получим: Xd=[{Gт h∙Sinα+Pкр[hкр∙Cosγ+(b+a)Sinγ]} / (GтCosα+ +PкрSinγ)] - а0 (90а)
При движении трактора по горизонтальному участку, получим:
Xd ={Pкр[hкрCosγ+(b+a)Sinγ]/(Gт+PкрSinγ)} - a o (91)
Таким образом, величина xd существенно зависит от параметра ao. Значительное смещение центра давления. является нежелательным: оно ухудшает сцепление гусениц с грунтом и увеличивает сопротивление качению. Чтобы уменьшить величину смещения ц.д. xd при работе трактора с нагрузкой и при движении на подъем, ц.т. тракто ра обычно располагают несколько впереди середи ны опорных поверхностей гусениц. Обычно его делают ao=+(0.05…0.08) L.
У машин, работающих с Ркр ц.т. смещают вперед (трелевочные тракторы), у бульдозеров – назад.
ОПРЕДЕЛЕНИЕ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ КОЛЕСНЫХ И ГУСЕНИЧНЫХ МАШИН
Для определения динамического и статического сцепного веса при движении на подъем необходимо знать положение центра тяжести автомобиля или трактора. Обычно в справочниках центра тяжести не приводятся. Определить же математически центр тяжести собранной машины очень трудоемко, т.к. она имеет значительное число деталей неправильной формы. Поэтому положение центра тяжести надо определять опытным путем. Более подробно рассмотрим этот вопрос на примере колесного трактора - рисунок 13а.
 |
Вертикальная плоскость, параллельная осям и проходящая через центр тяжести, для трактора в горизонтальном положении может быть получена путем определения нагрузки, приходящейся на переднюю и задние оси.
Рисунок 13 Схема определения центра тяжести колесной машины
a= G1∙L/G , (92)
где а – расстояние плоскости х-х от точки О;
L – база трактора (автомобиля);
G1 – вес трактора, приходящейся на переднюю ось;
G – вес трактора.
 |
Если трактор поднять за переднюю ось в точке В и поставить в наклонное положение, получим новую плоскость, которая также проходит через центр тяжести трактора. Эта новая плоскость х1-х1 в пересечении с плоскостью х3-х4 даст прямую, на которой лежит центр тяжести. Таким образом, ставя трактор в наклонное положение под различными углами в плоскости чертежа, можно определить положение центра тяжести С.
Рисунок 14 Схема определения центра тяжести гусеничного трактора
С этой целью трактор ставится на мостовые весы и при помощи небольшого крана поднимают его за переднюю ось, отмечая при каждом положении нагрузку на заднюю и переднюю оси (через динамометр). Одновременно при помощи отвеса и рулетки необходимо отмечать угол наклона трактора. Параметры r1, r2 и L, т.е. радиусы колес и база, а также величина а1 получается путем измерения. Согласно данным измерения и вычислениям по формуле (93) вычерчивается в определенном масштабе схема, изображающая разное положение вертикальных плоскостей, параллельных осям трактора, в зависимости от угла его наклона. Как показал опыт, такой метод дает с достаточной точностью для практических целей расположение центра тяжести.
Еще более точные результаты получаются, если брать достаточно большие значения для угла a, т.е. для угла наклона. По чертежу, вычерченному в большом масштабе (1:2,5), измеряется угол с точностью до 0.1о, а также расстояние с точностью до 2…3мм. Таким методом можно достаточно точно определить положение центра тяжести любого трактора или автомобиля. Если мостовых весов нет, рекомендуется пользоваться динамометром, подвешенным между краном и поднимаемой осью машины. Вертикальную координату центра тяжести можно определить графически и аналитически.
а1G=G1∙L1 откуда a1 =L1G1 / G (93)
Определив a1 графически находим положение центра тяжести (помня, что он находится на расстоянии «а» от геометрической оси задних колес). Для этого находим на схеме точку пересечения вектора веса G с перпендикуляром, опущенным на общую касательную к передним и задним колесам на расстоянии «а» от геометрической оси задних колес. После этого замеряем искомую величину h. Вертикальная величина (координата h) может быть определена аналитически:
h = r2+(a-a1/Cosα)∙Ctgα (94)
С некоторым приближением можно считать, что угол подъема машины α равен углу наклона к опорной поверхности прямой О1О2. В этом случае α определяется:
tgα=H / L1 (95)
Поперечная координата определяется установкой машины одной стороной (левой или правой) на платформе весов.
Определение координат центра тяжести гусеничных машин аналогично рассмотренному -рисунок 14б. Из условия равновесия трактора относительно точки А:
Рд∙Lд=G∙L a (96)
Продольная координата определится:
a=La+xo = Lд∙Pд/G+x o (97)
Для определения вертикальной координаты ц.т. трактор подвешивается к динамометру в наклонном положении. Уравнение равновесия относительно опоры А будет: P′д∙Cosa∙Lд+G∙h∙Sina=P′д∙hд∙Sina+G∙La∙Cosa (98)
откуда: h=hд∙P′д/G+(La-Lд∙P′д / G)∙Ctga (99)
УСТОЙЧИВОСТЬ АВТОМОБИЛЯ (ТРАКТОРА)
Под устойчивостью автомобиля (трактора) понимается его способность двигаться в разнообразных дорожных условиях без опрокидывания и без бокового скольжения колес (гусениц). В зависимости от направления опрокидывания и скольжения различают продольную и поперечную устойчивость.
Ввиду того, что у большинства машин величина ширины колеи меньше их базы (длины опорной поверхности), то наиболее вероятным и опасным является опрокидывание в поперечном направлении, чем в продольном.
Продольная устойчивость колесных машин нарушается, если под действием внешних сил и моментов передние или задние колеса начинают отрывается от грунта, т.е. или z1=0 или z2=0 - рисунок 15.
Рассмотрим случай ускоренного прямолинейного движения машины на подъем, когда возможно ее опрокидывание вокруг задней оси. Условие потери продольной устойчивости в общем виде запишется: åМв=0,
GaаCosa-GahSina-Pкрhкр-Mf-Pwhw-Pjh-Mjк=0, (100)
где Pj – сила инерции поступательно движущихся масс машины;
Mjк – инерционный момент колес машины.
С помощью полученного равенства можно определить предельный угол подъема a, величины максимальных сил, ускорений и геометрические параметры машины, при которых нарушается продольная устойчивость.
Определим максимальный угол подъема amax, при котором машина может стоять не опрокидываясь, т.е. Mf=0, Mjк=0, Pw=0, Pкр=0, Pj=0. Тогда последнее равенство в этом случае запишется в виде:
Ga∙а∙Cosamax-Ga∙h∙Sinamax=0 (101)
отсюда
tgamax=a / h (102)
В случае уклона
tgamax=(L-a) / h (103)
Следовательно, предельный угол подъема (спуска) зависит от соотношения базы машины L и высоты центра тяжести h, а также от его продольной координаты «а».
Трелевочные колесные машины обычно имеют очень короткую базу и высоко расположенный (большой клиренс) центр тяжести (ц.т.), а, следовательно, и худшую продольную устойчивость.
Считая, что максимальное значение угла подъема для современных автомобилей не превышает 45о - tgamax=1, получим соотношение h ≤ a, т.е. во избежание продольного опрокидывания высота центра тяжести не должна превышать расстояния от ц.т. автомобиля до задней оси.
Выражения (101), (102), (103) не учитывают возможности буксования ведущих колес машины. Практически до начала опрокидывания колеса начинают буксовать, и машина сползает назад вследствие недостаточного сцепления колес с дорогой.
Определим максимальный угол подъема по сцеплению с грунтом, приняв силу тяги Pкmax, развиваемую двигателем на низшей передаче, больше возможной силы тяги по сцеплению, т.е. Pкmax ≥ Рсц
Уравнение устойчивого движения на подъем запишется Рсц ≥ åR
j∙Gсц ≥ G∙(f∙Cosa+Sina)+Pкр , (104)
где åR – сумма всех сил сопротивления движению.
Для одиночной машины со всеми ведущими осями ( или гусеничной)
Gсц=G∙Cosa и Pкр=0,
тогда j∙G∙Cosa ≥ G∙(f∙Cosa+Sina) (105)
или
tg aсц ≤ (j - f) (106)
Таким образом, неравенство (106) показывает, что при условии Pкmax ≥ Рсц предельный угол подъема, преодолеваемого машиной по сцеплению с грунтом, не зависит от веса машины и от мощности ее двигателя, а определяется физико-механическими свойствами грунта и тягово-сцепными качествами движителя.
Для некоторых гусеничных машин на плотном грунте j=1.1…1.15, тогда aсц может достигать ≈ 45о и более.
Продольная устойчивость гусеничных машин обычно оценивается величиной смещения точки D, так называемого центра давления гусениц - рисунок 15б. Когда трактор неподвижен на горизонтальном участке и Pкр=0, и Gгр=0, точка D находится на линии действия силы Gт, т.е. под центром тяжести. При движении машины равнодействующая нормальных реакций дороги, под действием внешних сил и моментов смещается вперед или назад от центра тяжести.
Величина Х может быть легко найдена из уравнения моментов всех сил относительно точки В или А (при жесткой, небалансирной подвеске). Если равнодействующая нормальных сил проходит через одну из этих точек, например, через В (х=а), это означает начало потери устойчивости. Максимальные статические углы продольной устойчивости для незагруженного трактора, т.е. Gгр=0, Ркр=0 определяется из равенства:
Gт∙a∙Cosa-Gт∙h∙Sina=0 (107)
или tgamax=a / h (108)
 а)
а)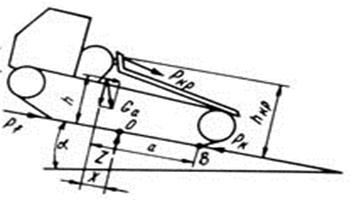 б)
б)
Рисунок 15 Силы и моменты, действующие на колесную и гусеничную машины на подъеме
При балансирной подвеске рама трактора поворачивается вокруг осей балансиров кареток. Поскольку расстояние между осями балансиров меньше L, то поворот корпуса трактора с такой подвеской происходит при меньших углах подъема (спуска).
Но такой поворот корпуса еще не означает опрокидывания, т.к. трактор садится на наклонные участки гусениц и дальнейший его поворот должен произойти относительно точек касания направляющего или ведущего колеса с грунтом. В связи с этим гусеничные тракторы намного устойчивее колесных и опасность продольного опрокидывания у них очень мала.
ПОПЕРЕЧНАЯ УСТОЙЧИВОСТЬ
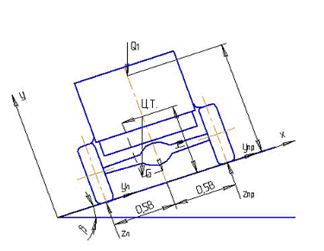 |
Назовем предельным статическим углом
 попе речного уклона наибольший угол уклона, на котором машина может стоять, не опрокидываясь набок и не сползая вниз. Угол поперечного уклона, на котором машина начинает опрокидываться,
попе речного уклона наибольший угол уклона, на котором машина может стоять, не опрокидываясь набок и не сползая вниз. Угол поперечного уклона, на котором машина начинает опрокидываться,
Рисунок 16 Схема сил, действующих на машину на поперечном уклоне
обозначим βmax, а угол, на котором она начинает сползать – βсц. Изобразим колесную машину, стоящую на предельном поперечном уклоне - рисунок 16. Величина угла βmax определяется из условия, что опрокидывание начнется, когда нормальная реакция zпр будет равна нулю.
Написав уравнение относительно возможной оси опрокидывания О, получим:
G∙h∙Sinβmax - G∙(B/2)∙Cosβmax = 0 (109)
Откуда tgβmax=B/(2h) = ηпоп , (110)
где ηпоп–коэффициент поперечной устойчивости.
При выводе последнего равенства было допущено, что центр тяжести машины находится в продольной плоскости симметрии, не учитывалось также некоторое смещение ц.т., происходящее под влиянием добавочных прогибов рессор подвески, возникающих при стоянке на поперечном уклоне. У гусеничных тракторов и тракторов с металлическими колесами осью опрокидывания при достаточной твердости почвы являются наружные боковые кромки ходовых органов.
В этом случае: tgβmax=(B+b) / (2h) (111)
Определим статический угол поперечного уклона βсц, на котором возможно сползание машины.
Заменив угол βmax на βсц на рисунке 16 и составив уравнение проекций всех сил, действующих в поперечной плоскости на ось, параллельную поверхности пути, получим: G∙Sinβсц=У1+У2=jy(z1+z2)=jy∙G∙Cosβсц , (112)
где Ул и Упр – боковые реакции дороги на колеса;
zл ,zпр нормальные реакции дороги на колеса;
jy – коэффициент поперечного сцепления шин с дорогой в боковом направлении.
Из приведенного уравнения проекций следует:
tgβсц = jy (113)
Величина коэффициента jy зависит от механических свойств дороги и конструкции ходовых органов. Известно, что автомобили наиболее подвержены боковому скольжению на обледенелых дорогах, на которых коэффициент jy резко снижается. Экспериментально установлено, что гусеницы обычной конструкции надежно удерживают трактор от сползания на крутизне склонов ≈ до 16о, на более крутых склонах необходимы гусеницы с почвозацепами особой формы, имеющие развитые боковые поверхности. Практически опрокидывание без бокового скольжения бывает очень редко.
УСТОЙЧИВОСТЬ ПРИ ПОВОРОТЕ
 |
Во время движения на трактор и автомобиль могут действовать и другие боковые силы, стремящиеся нарушить его поперечную устойчивость. Из них весьма важное значение имеют инерционные силы, возникающие при повороте.
Рисунок 17 Схема сил, действующих на автомобиль при повороте
Рассмотрим поворот колесной машины на горизонтальном участке с ν = const и R = const - рисунок 17. Примем, что центр поворота О расположен в точке пересечения геометрических осей всех колес машины. При повороте возникает результирующая центробежная сила Ру, приложенная к центу тяжести машины и направленная по радиусу от центра поворота:
Ру=(G∙ω2∙Rцт) / g , (114)
где ω – угловая скорость вращения машины;
Rцт – радиус поворота цента тяжести.
Разложим силу Ру на две составляющие: продольная вызывает перераспределение нормальных нагрузок между передними и задними колесами, поперечная составляющая стремится опрокинуть машину - Р′у. Величина Р′у определится: Р′у=Ру∙Cosγц=(G∙ω2∙Rцт)/g∙Cosγц=G∙ν2/(g∙R) , (115)
где γц – угол наклона результирующей силы Ру;
ν – средняя поступательная скорость при повороте;
 |
R – минимальное расстояние от центра поворота до продольной оси машины.
Рисунок 18 Простейшая схема определения заноса (опрокидывания) автомобиля
С увеличением скорости и уменьшением радиуса поворота центробежная сила резко возрастает.
Наиболее опасным с точки зрения поперечной устойчивости является криволинейное движение на поперечном уклоне, совершаемое в направлении к его верхней части. В этих условиях составляющая Р′у центробежной силы параллельна поверхности уклона, направлена вниз по уклону и суммируется с боковой составляющей веса G∙Sinβ. Итак, при движении автомобиля на повороте радиуса R возникает центробежная сила Ру, стремящаяся сдвинуть его от центра поворота. При этом может быть опрокидывание или занос. В точке О2 приложим противоположнонаправленные силы Р′у, получим момент Р′у∙hд опрокидывающий автомобиль вокруг точки О1, и силу Р′у сдвигающую колеса вбок. Что произойдет раньше? Для этого определим скорости для каждого случая - рисунок 18. Предельная скорость по опрокидыванию:
åМо=0 Р′у∙hд=Ga∙B/2 (116)
или (Ga∙ν2∙hд)/g∙R=Ga∙B/2
откуда νопр= B∙g∙R/(2∙hд)
B∙g∙R/(2∙hд)
 (117)
(117)
Чем больше В, R, и меньше hд, тем выше допустимаpabs="http://ok-t.ru/studopediaru/baza4/138294867423.files/image102.png" /> (117)
Чем больше В, R, и меньше hд, тем выше допустимая скорость. Предельная скорость по началу заноса :
Р′у=j∙Ga
или
(Ga∙ν2)/g∙R=j∙Ga
νзан=j∙g∙R (118)
Разделив равенство (117) на (118), получим:
νопр/νзан=(B∙g∙R)/(2∙hд∙j∙g∙R)=B/(2∙j∙hд) (119)
Т.к. B>hд и j<1, то νопр>νзан и занос автомобиля наступит раньше.
ЗАНОС ПЕРЕДНИХ И ЗАДНИХ КОЛЕС
Очень опасным является боковое скольжение колес машины, которое происходит при интенсивном торможении машины, и приводит к внезапному вращению вокруг какой-то вертикальной оси.
 |
Это можно объяснить тем, что в контакте колеса с грунтом при появлении боковой силы одновременно возникают поперечная Y и продольная X
Рисунок 19 Схема одновременного действия на колесо продольной и
поперечной реакций грунта
реакции вследствие торможения или трогания с места - рисунок 19. Равнодействующая этих реакций R= (х2+у2) не может быть больше силы сцепления колеса с грунтом Rmax = j∙Gк, где Gк – нагрузка на колесо.
Предположим, что коэффициент сцепления шины с дорогой в продольном и поперечном направлении одинаков, т.е. j =jу=j.
=jу=j.
Тогда У=(j∙Gк)2 - х2 (120)
 |
Из полученного равенства видно, что чем больше продольная касательная реакция Х, тем меньше величина Y и тем быстрее наступает боковое скольжение колеса. а)
 |
б)