Стабилизация выходного напряжения
Схема стабилизации выходного напряжения представляет собой замкнутую петлю автоматического регулирования (рис. 83). Эта петля включает в себя:
· схему управления 8;
· согласующий предусилительный каскад 9;
· управляющий трансформатор TV1;
· силовой каскад 2;
· силовой импульсный трансформатор TV2;
· выпрямительный блок 3;
· дроссель межканальной связи 4;
· блок фильтров 5;
· делитель напряжения обратной связи 6;
· делитель опорного напряжения 7.
В составе схемы управления 8 имеются следующие функциональные узлы:
· усилитель сигнала рассогласования 8.1 с цепью коррекции Zk;
· ШИМ-компаратор (модулятор) 8.2;
· генератор пилообразного напряжения (осциллятор) 8.3;
· источник опорного стабилизированного напряжения Uref 8.4.

Рис. 83
В процессе работы усилитель сигнала рассогласования 8.1 сравнивает выходной сигнал делителя напряжения 6 с опорным напряжением делителя 7. Усиленный сигнал рассогласования поступает на широтно-импульсный модулятор 8.2, управляющий предоконечным каскадом усилителя мощности 9, который, в свою очередь, подает модулированный управляющий сигнал на силовой каскад преобразователя 2 через управляющий трансформатор TV1. Питание силового каскада производится по бестрансформаторной схеме. Переменное напряжение питающей сети выпрямляется сетевым выпрямителем 1 и подается на силовой каскад, где сглаживается конденсаторами емкостной стойки. Часть выходного напряжения стабилизатора сравнивается с постоянным опорным напряжением и затем осуществляется усиление полученной разности (сигнала рассогласования) с введением соответствующей компенсации. Широтно-импульсный модулятор 8.2 преобразует аналоговый сигнал управления в широтно-модулированный сигнал с переменным коэффициентом заполнения импульса. Схема модулятора осуществляет сравнение сигнала, поступающего с выхода усилителя сигнала рассогласования с напряжением пилообразной формы, которое получается от специального генератора 8.3.
Основными передаточными функциями ИП являются функция вход-выход, характеризующая способность схемы подавлять входные шумы и пульсации и не пропускать их на выход, и функция управление-выход, характеризующая степень изменения выходных напряжений при различных коэффициентах заполнения импульсов. В системе с замкнутой обратной связью коэффициент заполнения импульсов определяется усиленным и компенсированным сигналом рассогласования. Поясним это подробнее.
Допустим, некоторое возмущающее воздействие (например, увеличение токопотребления в нагрузке) первоначально вызвало отклонение выходного напряжения на некоторую величину в сторону уменьшения. Поэтому между опорным напряжением и сигналом обратной связи изменяется величина рассогласования.
Благодаря этому увеличивается ширина выходных импульсов модулирующей схемы 8-2. Поэтому выходное напряжение увеличивается, но не достигает прежнего значения, а устанавливается на уровне чуть меньшем, чем до воздействия возмущения, и сохраняется на этом новом уровне до тех пор, пока повышенное токопотребление в нагрузке не прекратится. Вновь установившийся уровень выходного напряжения обеспечивает ту величину сигнала рассогласования, которая, будучи усиленной усилителем ошибки 8.1, определяет новую ширину управляющего импульса, поддерживающую этот новый уровень выходного напряжения. Другими словами, система переходит в новое состояние динамического равновесия, но при большем, чем ранее, сигнале рассогласования и другой (большей) ширине управляющих импульсов.
Чем больше коэффициент усиления усилителя ошибки, тем меньше изменение выходного напряжения, которое обусловит необходимую для поддержания этого напряжения ширину управляющих импульсов. Коэффициент усиления усилителя 8.1 ограничивается условием устойчивой работы всей петли регулирования в целом. Значение коэффициента усиления по петле обратной связи равно произведению коэффициентов усиления типовых звеньев, входящих в контур обратной связи, а его фазовый сдвиг равен сумме фазовых сдвигов типовых звеньев. Поэтому коэффициент усиления по петле обратной связи и его фаза определяют стабильность работы системы и возможность возникновения в ней генерации.
Для того, чтобы система работала устойчиво, АЧХ и ФЧХ усилителя 8.1 схемотехнически подвергается коррекции с помощью корректирующей цепи Zk, которая включается как звено отрицательной обратной связи, охватывающей усилитель ошибки 8.1. При этом конфигурация цепочки Zk обеспечивает необходимую зависимость глубины этой ООС от частоты усиливаемого сигнала. Проще говоря, Zk – это цепь, при помощи которой вводится отрицательная частотно-зависимая обратная связь.
У преобразователей на основе TL494 стабилизация выходных напряжений осуществляется методом широтно-импульсной модуляции. Суть его заключается в том, что сигнал обратной связи, пропорциональный уровню напряжения в канале +5 В, при гальванической подаче его на не инвертирующий вход усилителя ошибки DA3 (вывод 1 микросхемы TL494), определяет ширину выходного импульса микросхемы и изменяет ее в соответствии с отклонениями выходного напряжения канала +5 В от номинального значения.
Пусть под воздействием какого-либо дестабилизирующего фактора (например, скачкообразного изменения нагрузки) выходное напряжение в канале +5 В уменьшилось. Тогда уменьшится уровень сигнала обратной связи на неинвертирующем входе усилителя ошибки DA3. Следовательно, выходное напряжение усилителя уменьшится. Поэтому увеличится ширина выходных импульсов микросхемы на выводах 8 и 11. Значит, увеличится время открытого состояния за период силовых ключевых транзисторов инвертора. Следовательно, большую, чем ранее, часть периода через первичную обмотку силового импульсного трансформатора будет протекать нарастающий ток.
Следовательно, большую, чем ранее, часть периода в сердечнике трансформатора будет существовать нарастающий магнитный поток, а значит, дольше, чем ранее, на вторичных обмотках этого трансформатора будут действовать наведенные этим потоком ЭДС Другими словами, импульсы ЭДС на вторичной стороне силового трансформатора станут шире (при неизменном периоде следования). Поэтому увеличивается постоянная составляющая, выделяемая сглаживающим фильтром из импульсной последовательности после выпрямления, т.е. выходное напряжение канала +5В увеличится, возвращаясь к номинальному значению.
При увеличении выходного напряжения +5В процессы в схеме будут обратными. Стабилизация выходных напряжений остальных каналов может осуществляться по-разному в разных схемах. Традиционным схемотехническим решением является применение метода групповой стабилизации. Для этого в схему блока включается специальный элемент межканальной связи, в качестве которого обычно используется многообмоточный дроссель.
При этом изменение любого выходного напряжения приводит благодаря электромагнитной связи между обмотками дросселя групповой стабилизации к соответствующему изменению выходного напряжения +5В с последующим включением механизма ШИМ. Дроссель групповой стабилизации обычно представляет собой четыре обмотки (по одной обмотке в каждом выходном канале БП), намотанные на одном кольцевом ферритовом сердечнике и включенные синфазно. В этом случае дроссель выполняет в схеме две функции:
· функцию сглаживания пульсации выпрямленного напряжения – при этом каждая обмотка для своего канала представляет сглаживающий дроссель фильтра и работает как обычный дроссель;
· функцию межканальной связи при групповой стабилизации – при этом благодаря электромагнитной связи через общий сердечник дроссель работает как трансформатор, передающий изменения величины токов, протекающих через обмотки каналов +12 В, -12 В и -5 В в обмотку канала +5 В.
Для того чтобы обеспечить устойчивость петли регулирования выходных напряжений ИБП при минимальной длительности переходного процесса, амплитудно-частотная характеристика усилителя ошибки DA3 подвергается коррекции.
Это делается с помощью RC-цепочек, включаемых как цепи отрицательной обратной связи, охватывающей усилитель DA3.
Для уменьшения уровня помехообразования, на вторичной стороне ИП устанавливаются апериодические RC-цепочки.
Преимущество апериодического переходного процесса перед колебательным заключается в снижении амплитуды первоначального выброса за счет заряда конденсатора RC-цепочки, а также в более быстром его затухании за счет резистора этой цепочки, который снижает добротность паразитного колебательного контура.
Эффективным методом обеспечения апериодического характера переходного процесса и является подключение RC-цепочки параллельно обмоткам трансформатора и диодам выпрямителя.
4.10.2. способы построения цепи обратной связи
в схемах преобразователей напряжения
В обратноходовом преобразователе обязательно нужно предусматривать ограничение или стабилизацию выходного напряжения. Работа цепи стабилизации приводит к тому, что при возрастании выходного напряжения уменьшается длительность прямого хода, что влечет за собой уменьшение порций энергии, передаваемых через накопитель в единицу времени, и это приводит к восстановлению выходного напряжения. Стабилизация напряжения в импульсных обратноходовых преобразователях может осуществляться за счет отрицательной обратной связи (ООС) с дополнительной обмотки трансформатора или подачей сигнала ООС из выходной цепи [ ]. Второй вариант обеспечивает большую стабильность выходного напряжения и меньшее выходное сопротивление.
Обратноходовой преобразователь может содержать несколько вторичных обмоток накопителя. Достаточно стабилизировать напряжение одного из выходов, как другие также будут стабилизированы, правда, немного хуже по изменению нагрузки. Стабилизация по всем выходам происходит потому, что импульсы напряжения и прямого и обратного хода существуют пропорционально виткам на всех обмотках накопителя и изменение нагрузки по любому выходу влечет за собой изменение амплитуды импульсов напряжения обратного хода.
По способу регулирования ООП можно разделить на два больших класса: релейные или с так называемой дельта-сигмамодуляцией и с широтно-импульсной модуляцией.
Релейный способ регулирования характеризуется изменением отношения длительности импульсов к периоду в совокупности с изменением частоты их следования. Примером таких преобразователей могут служить блоки питания телевизионных приемников третьего – пятого поколений отечественного производства. Эти источники собраны либо на основе автогенераторов на биполярных транзисторах, либо на микросхеме КР1033ЕУ2 (КР1033ЕУ5) и мощном полевом транзисторе. При любом из способов построения релейного ООП узел управления определяет момент окончания этапа передачи энергии в нагрузку и включает коммутирующий транзистор. Длительность его включенного состояния зависит от выходного напряжения. Если оно меньше заданного, длительность импульса увеличивается, и наоборот.
Еще одна особенность релейного управления – повышение частоты преобразования с уменьшением тока нагрузки. Когда достигнута минимальная длительность импульса (частота максимальна), выходное напряжение может возрасти относительно номинального уровня. Чтобы избежать этого явления, узел управления должен обеспечить пропуск импульсов при уменьшении тока нагрузки ниже определенного значения.
У преобразователей с широтно-импульсной модуляцией частота следования импульсов накопления постоянна. Выходное напряжение стабилизируют изменением отношения длительности импульсов к периоду их следования, как и в случае релейного управления.
ООП с широтно-импульсной модуляцией подразделяют на две группы – с непрерывным и прерывистым магнитным потоком трансформатора.
 Рис. 94
Рис. 94
|
В [22] приводятся четыре варианта стабилизации выходного напряжения (рис. 94).
Первый, самый простой, соответствует рис. 94, а, который надо рассматривать как дополнение к рис. 109. Как уже указывалось выше, широтно-импульсный модулятор микросхемы обеспечивает стабилизацию напряжения на входе «Упр.» на уровне 5,7 В. Поскольку обмотки II и III связаны между собой, то при изменении напряжения сети напряжение на нагрузке также стабилизируется. Однако, при изменении тока нагрузки изменение падения напряжения на активном сопротивлении обмотки II трансформатора TV1 и на диоде VD1 никак не влияет на процесс стабилизации, и выходное сопротивление преобразователя для этого варианта получается наибольшим.
Кроме того, возникает проблема точной установки выходного напряжения. Выходное напряжение преобразователя в этом варианте стабилизируется приблизительно на уровне UOUT = (5,7 + UVD4) ´ N2 /N3 -UVD1, где UVD4 и UVD1-падение напряжения на соответствующих диодах, N2 и N3 - числа витков обмоток II и III. В первом приближении число витков на вольт для транс-
форматоров мощностью 50...100 Вт составляет около 0,6...1, поэтому изменение числа витков обмотки II на один приводит к изменению выходного напряжения на 1...1,6 В.
Заметно повысить стабильность выходного напряжения можно, установив между выходом выпрямителя на диоде UVD4 и входном «Упр.» микросхемы стабилитрон, соответственно увеличив число витков обмотки III (рис. 94,б). В таком варианте увеличивается коэффициент усиления в цепи обратной связи, что заметно повышает стабильность выходного напряжения при изменении напряжения сети и несколько снижает выходное сопротивление.
Значение выходного сопротивления можно получить, управляя током через вход «Упр.» микросхемы сигналом, пропорциональным отклонению выходного напряжения от заданного. Вариант схемы стабилизатора, реализующий указанный принцип, приведен на рис. 94, в. Обмотка III трансформатора TV1, диод VD4 и конденсатор С3 образуют выпрямитель с напряжением 10...15 В, это напряжение некритично. Оно должно быть больше напряжения на входе «Упр.» микросхемы (5,7 В) на 5...10 В, необходимых для питания фототранзистора U1.1оптрона U1.
При превышении напряжения на выходе преобразователя суммы рабочего напряжения на стабилитроне VD5 и светодиоде U1.2 оптрона U1 (около 1,3В), включается светодиод и через фототранзистор U1.1 оптрона начинает течь ток. Напряжение на выходе преобразователя стабилизируется. Резисторы R2 и R3 обеспечивают необходимую крутизну передачи сигнала рассогласования на излучающий светодиод оптрона.
Недостатком варианта по схеме рис. 94, в является необходимость подбора стабилитрона для точной установки выходного напряжения.
Наименьшим выходным сопротивлением, наилучшей стабильностью и возможностью плавной регулировки выходного напряжения обладает вариант стабилизации по схеме рис. 94, г. Сигналом рассогласования является анодный ток упоминавшегося выше регулируемого аналога стабилитрона DA2. Пока напряжение на его входе «Упр.» не превышает 2,5 В, ток анода будет менее 1,5 мА, а при достижении 2,5 В резко увеличивается. Этот ток течет через светодиод U1.2 оптрона U1, в результате выходное напряжение преобразователя стабилизируется на уровне: Uвых=(R4/R5+1).Uобр, где Uобр=2,5...2,55В- образцовое напряжение микросхемы КР142ЕН19А.
Сопротивления резисторов R4 и R5 рассчитываются исходя из тока через делитель (около 1 мА). Любой из резисторов R4 и R5 может быть подстроечным, что обеспечивает возможность точной установки выходного напряжения.
Резистор R3 пропускает начальный ток аналога стабилитрона DA2, а R2 ограничивает ток через светодиод оптрона и, совместно с конденсатором С5 обеспечивает стабильность цепи автоматического регулирования.
Типовые параметры различных вариантов стабилизации приведены ниже, где приняты следующие обозначения: UIII - напряжение на выходе выпрямителя с обмоткой III, UOUT -точность установки выходного напряжения, UOUT(Uin) - нестабильность выходного напряжения при колебаниях напряжения сети, UOUT(IOUT) - нестабильность выходного напряжения при изменении тока нагрузки.
Вариант а: UIII = 5,7 В, ΔUOUT = 10 %, ΔUOUT (UIN) = 5 В, UOUT (IOUT) = 1,5 А;
Вариант б: UIII = 28 В, ΔUOUT = 5 %, ΔUOUT (UIN) = 2,5 В, UOUT (IOUT) = 1,5 А;
Вариант в: UIII = 12 В, ΔUOUT = 5 %, ΔUOUT (UIN) = 1 В, UOUT (IOUT) = 0,5 А;
Вариант г: UIII = 12 В, ΔUOUT = 1 %, ΔUOUT (UIN) = 0,2 В, UOUT (IOUT) = 0,2 А.
Для получения максимальной точности и наибольшей стабильности в этом случае целесообразнее выбирать последний вариант схемы стабилизации. Для него необходимое напряжение на выходе выпрямителя с обмоткой III составляет 12 В.
4.10.3. обратная связь в многоканальных импульсных обратноходовых
преобразователях напряжения
Стабилизация напряжения в импульсных обратноходовых преобразователях может осуществляться за счет отрицательной обратной связи (ООС) с дополнительной обмотки трансформатора или подачей сигнала ООС из выходной цепи. Второй вариант обеспечивает большую стабильность выходного напряжения и меньшее выходное сопротивление. Однако, если выходных напряжений у преобразователя несколько, возникает вопрос, откуда взять сигнал обратной связи? В [23] сравнивается несколько возможных способов формирования этого сигнала и делается попытка ответить на поставленный вопрос.
Построению обратноходовых преобразователей напряжения на микросхеме КР1156ЕУ5 посвящено достаточно много публикаций, например [31, 60]. Для сравнения различных вариантов подачи сигнала обратной связи был изготовлен макет преобразователя с выходным напряжение 8 В и двумя выходными напряжениями +13 В и −12 В. Основная часть схемы устройства приведена на рис.95. Микросхема включена стандартно как повышающей преобразователь, при этом накопительный дроссель заменен на разделительный трансформатор. Цепь VD1VD2 гасит выбросы на индуктивности рассеяния первичной обмотки. Резистор R3 ограничивает коллекторный ток предоконечного транзистора микросхемы и, соответственно, базовый ток выходного.
На рис. 95 указано: R1-0, 22 Ом; R2-620 Ом; R3-200 Ом; R4, R5-240 Ом, 1Вт; VD1-КС527А; VD2…VD4-1N5818; DA1-KP1156EУ5; C1-100,0×16 В;
C2-1500; C3,C4-68,0×15В; U1.1-4N26.
Трансформатор преобразователя намотан на кольцевом сердечнике К20×16×6 из феррита марки М2000НМ1-17. Перед намоткой алмазной ножовкой в кольце пропилен зазор шириной 1,5 мм. Для сохранения прочности кольца в зазор эпоксидной смолой вклеен кусочек стеклотекстолита. В обратноходовых преобразователях очень важна максимальная связь между обмотками, поэтому они выполнены таким образом. Жгутом из семи проводов ПЭШО-0,35 намотано 47 витков, затем секции соединены попарно последовательно. Это образовало обмотки 1, 2 и 3 по 94 витка с индуктивностью около 400 мкГн и обмотку 4 – 47 витков и 100 мкГн.
 Рис. 95
Рис. 95
|
Для изучения влияния схемы ООС поочередно один из выходов преобразователя нагружался на резистор сопротивление 100 Ом, при этом проверялось изменение выходного напряжения в каждом его канале. Результаты приведены в табл. 8. Отметим сразу, что при симметричной нагрузке оба выходных напряжения по абсолютной величине всегда изменялись одинаково.
Таблица 8
| Канал | Нагруж. канал | Изменение выходного напряжения, В при варианте ООС | ||||
| Рис. 96 | Рис. 97, Общ., −Uвых | Рис. 97, +Uвых, −Uвых. | Рис. 98 | Рис.99 | ||
| +Uвых | +Uвых | −0,35 | −0,31 | −0,17 | −0,24 | 0,85 |
| −Uвых | −0,01 | +0,36 | 0,16 | −0,01 | −0,56 | |
| −Uвых | +Uвых | −0,01 | 0,16 | 0,11 | 1,32 | |
| −Uвых | −0,34 | −0,17 | −0,11 | −0,84 | ||
| Макс. отклонение | −0,35 | +0,36 | −0,17 | −0,24 | 1,32 |
Самый простой способ подачи сигнала обратной связи – с выпрямителя, питающегося от обмотки 4. В этом случае элементы, подключенные на рис. 95 к входу обратной связи «Comp.» микросхемы DA1 (вывод 5) не устанавливались, была подключена цепь по схеме рис. 96. Этот вариант прост, широко используется в одно- и многоканальных источниках питания, обеспечивает хорошую стабильность при колебания входного напряжения, но выходное сопротивление преобразователя получается довольно большим. Его вполне можно применять при мало меняющихся токах нагрузки. Результаты изменения абсолютной величины выходного напряжения каждого канала при подключении нагрузки в тот же или другой канал приведены в третьей колонке таблицы. Каналы почти независимы – увеличение нагрузки одного из каналов практически не влияет на напряжение в другом.
На рис. 96 указано: R6-4,7 кОм; R7-1 кОм; VD5-1N5818; C5-68,0×15 В. На рис. 97 указано: R7-2,4 кОм; R8-510 Ом; DA2-TL431; C5-0,1. На рис. 98 указано: R6-18 кОм; R7-1,4 кОм; R8-510 Ом; R9-18 кОм; DA2-TL431; C5-0,1. На рис. 99 указано: R6-10 кОм; R7-15 кОм; R8-510 Ом; DA2-TL431; C5-0,1.
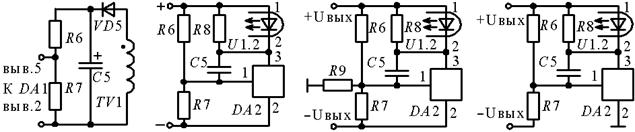
Рис. 96 Рис. 97 Рис. 98 Рис. 99
Лучшие параметры преобразователя обеспечивает подача сигнала отклонения выходного напряжения от номинального значения через транзисторный оптрон. Типовая схема формирования ООС при помощи так называемого «регулируемого стабилитрона» TL431 (КР142ЕН19А) приведена на рис. 97. Пока напряжение на входе рассматриваемой цепи мало и между управляющим входом микросхемы DA2 (вывод1) и ее катодом (вывод 2) напряжение мене 2,5 В, ток анода (вывод 3) не превышает 1 мА. Весь этот ток проходит через резистор R8 и не вызывает свечения светодиода U1.2 оптрона U1. При превышении входным напряжением порогового значения анодный ток DA2 резко увеличивается, включается светодиод U1.2 и открывается фототранзистор U1.1 (рис. 95). На вход обратной связи «Comp.» микросхемы DA1 поступает сигнал ООС и напряжение на том выходе преобразователя, к которому подключен вход цепи рис. 97, стабилизируется. Пороговое напряжение устанавливают резистором R6, рассчитывая его по формуле R6 = R7(Uвых /2,5−1).
В одноканальном преобразователе такая цепь стабилизирует выходное напряжение очень жестко. В многоканальном устройстве входы цепи рис. 97 можно подключить к выходу одного из каналов, например, к – Uвых и общему проводу (4-я колонка таблицы). Сопротивление резистора R6 составит 9,1 кОм. В этом случае будет стабилизироваться напряжение 12 В именно в этом канале независимо от того, какой из них нагружен. Напряжение в канале +Uвых уменьшается при подключении нагрузки к каналу –Uвых, причем весьма заметно.
Этот вариант стабилизации имеет смысл применять в тех случаях, когда для одного из каналов (+Uвых) не важна высокая стабильность напряжения, или если по одному из каналов (–Uвых) потребление постоянно. Нередко его также используют, когда мощность, требуемая от одного из каналов, намного больше, чем от другого. В этом случае цепь, изображенная на рис. 97 подключают к первому из них, а во второй устанавливают линейный стабилизатор напряжения.
Если цепь отрицательной обратной связи подключить между выходами +Uвых и –Uвых, стабильным будет суммарное напряжение каналов (5-я колонка таблицы). Сопротивление резистора R6 в этом случае составит около 20,5 кОм. Изменение выходного напряжения каждого канала примерно вдвое меньше, чем у предыдущего варианта, однако ни одно из них не является жестко стабилизированным.
Чем-то средним между двумя предыдущими, как по схеме, так и по результатам, является цепь рис. 98. Можно считать, что в стабилизации с одинаковым «весом» участвуют напряжение в канале –Uвых и суммарное напряжение двух каналов. Соотношение роли напряжений определяется резисторами R6 и R9, в данном случае равными. Изменяя эти резисторы, можно менять влияние каналов друг на друга, приближаясь к одному из рассмотренных выше вариантов.
В литературе можно встретить еще один способ стабилизации выходных напряжений, показанный на рис. 99. Хотя при симметричной нагрузке все варианты по схемам рис. 97...рис. 99 обеспечивают весьма высокую стабильность выходных напряжений, при «перекосе» этот способ резко уступает им. Более того, при увеличении нагрузки в канале +Uвых выходное напряжение обоих каналов увеличивается, причем изменение это в несколько раз больше, чем в любом из предыдущих вариантов. Это означает, что выходное сопротивление по каналу +Uвых имеет отрицательный знак, что может в ряде случаев быть крайне нежелательным.
Каждый из рассмотренных вариантов, кроме последнего, имеет свои преимущества и недостатки, и свои области применения цепей стабилизации выходных напряжений обратноходовых преобразователей.
СЮДА ПОМЕСТИТЬ СХЕМЫ С ФОРМУЛАМИ И ВРЕМЕННЫМИ ДИАГРАМАМИ
МОСТОВЫЕ
ОДНОТАКТНЫЕ прямоходовые
ОБРАТНОХОДОВЫЕ
БЕСТРАНСФОРМАТОРНЫЕ СХ. ПР-ЕЙ
Дальше схемы пр.- й с микропроцессорным управлением и другие способы обозначить…..
ЗАЩИТА4.5. Основные принципы построения
различных вариантов схем защитного отключения
Назначение схем защиты заключается в ограничении потребляемого от сети тока. Это делается для того, чтобы предотвратить выжигание чрезмерно большим током в первую очередь силовых транзисторов инвертора.
Срабатывание любой из защитных схем ведет к отключению напряжения посредством воздействия на управляющую микросхему ИБП.
Полный состав комбинированной защиты включает в себя:
· схему контроля ширины управляющего импульса;
· схему защитного отключения при КЗ в нагрузке;
· схему защиты от выходного перенапряжения.
Механизмы защитного отключения и ограничения максимальной ширины управляющего импульса заложены в архитектуру ИС TL494 и являются базовыми при конструировании разных защитных схем (рис.33…36). При возникновении КЗ в нагрузке сначала управляющая микросхема переходит в режим ограничения, и если КЗ продолжает развиваться, то происходит защитное отключение.
Суть и смысл защитного отключения заключаются в том, чтобы силовые транзисторы инвертора переставали переключаться и оставались бы в закрытом состоянии неограниченно долго при возникновении аварийной ситуации, называемой коротким замыканием в нагрузке любого из выходных каналов ИБП. Для того чтобы оба силовых транзистора инвертора оказались закрыты одновременно, на их базах не должно быть управляющих импульсов. Тогда первичная обмотка силового импульсного трансформатора окажется отключенной от шины выпрямленного напряжения сети и, следовательно, через первичную обмотку и силовые транзисторы не будет протекать ток. Поэтому силовые транзисторы не будут подвержены опасности выжигания этим чрезмерно большим током при КЗ на вторичной стороне. Таким образом при исчезновении управляющих импульсов на базах силовых транзисторов желаемый защитный эффект будет достигнут.
Источником (генератором) управляющих импульсов является микросхема TL494. Поэтому для осуществления защитного отключения необходимо заблокировать ее работу. Это можно сделать, если принудительно заставить любой из компараторов DA1, DA2 прекратить переключения и перейти в статическое состояние с постоянным высоким уровнем напряжения (логическая 1) на выходе. Тогда работа всего цифрового тракта микросхемы будет заблокирована. Оба выходных транзистора ее окажутся в статическом закрытом состоянии и управляющие импульсы на выводах 8 и 11 (либо 9 и 10) исчезнут, превратившись в статические потенциалы, которые не могут передаться на базы силовых транзисторов, т.к. связь с ними осуществляется через управляющий трансформатор TV1. Для того чтобы прекратить переключения компаратора DA1 либо DA2, достаточно на его неинвертирующий вход (вывод 4 для компаратора, DA1 либо вывод 3 для компаратора DA2) подать статический потенциал, превышающий амплитуду пилообразного напряжения, поступающего на инвертирующие входы обоих компараторов (вывод 5) с выхода генератора пилообразного напряжения DA6.
Амплитуда пилообразного напряжения составляет +3,2 В. Поэтому, если построить схему защиты так, что на вывод 4 либо на вывод 3 ИС TL494 в результате короткого замыкания в нагрузке будет подан статический потенциал, превышающий +3,2 В, то произойдет блокировка работы ИС. Однако генератор пилообразного напряжения при этом не прекращает своей работы, т.е., несмотря на отсутствие выходных импульсов, пилообразное напряжение продолжает вырабатываться.
Этот базовый принцип и положен в основу построения всех вариантов схем защитного отключения, применяемых в разных схемах импульсных блоков питания на основе управляющей микросхемы TL494. При этом необходимо понимать, что термин «защитное отключение» подразумевает отключение (закрывание) именно силовых транзисторов инвертора, а не управляющей микросхемы, которая продолжает работать в специфическом режиме блокировки ее цифрового тракта до тех пор, пока на шине питания микросхемы Upom имеется напряжение, превышающее уровень +7 В.
Датчиком для типовой схемы защитного отключения обычно является диодно-резистивньй либо резистивный делитель, подключаемый к шинам выходных напряжений ИБП. Такой делитель «контролирует» уровень напряжения на этих шинах. При КЗ в нагрузке какой-либо из контролируемых шин изменяется распределение потенциалов в узлах такого делителя-датчика, что и является сигналом на срабатывание для схемы защитного отключения.
Механизм ограничения максимальной длительности управляющего импульса имеет другую структуру. Из функциональной схемы микросхемы TL494 (рис. 34 функциональной схемы TL494 и рис. 35) видно, что напряжение на неинвертирующем входе ШИМ-компаратора DA2 определяется наибольшим из выходных напряжений двух усилителей ошибки DA3, DA4.
Для того чтобы выходные напряжения усилителей DA3, DA4 не влияли бы друг на друга, выходы этих усилителей подключены к неинвертирующему входу ШИМ-компаратора DA2 через развязывающие диоды, расположенные внутри микросхемы.
Основная идея, заложенная в построение механизма ограничения, состоит в том, что усилитель DA4 включается так; чтобы изменение его выходного напряжения при растущей ширине управляющих импульсов, было бы противоположным изменению выходного напряжения усилителя DA3.
Если в нагрузке возник режим повышенного токопотребления (начальная стадия КЗ). Выходное напряжение в канале +5 В уменьшается. Это уменьшение через цепь обратной связи передается на неинвертирующий вход усилителя ошибки DA3 (вывод 1 микросхемы). Выходное напряжение DA3, а значит, и напряжение на неинвертирующем входе ШИМ-компаратора DA2 начинает уменьшаться. Благодаря этому ширина выходных управляющих импульсов микросхемы возрастает, т.е. управляющая микросхема стремится поддержать выходные напряжения ИП на прежнем уровне за счет увеличения времени открытого состояния силовых транзисторов. На один из входов усилителя ошибки DA4 подается сигнал обратной связи, уровень которого пропорционален ширине управляющих импульсов (времени открытого состояния силовых транзисторов). Уровень этого сигнала в рассматриваемой ситуации будет возрастать. При этом DA4 включается так, что выходное напряжение его с ростом уровня сигнала обратной связи также растет. В результате имеют место два противоположно направленных процесса. Выходное напряжение усилителя ошибки DA3 уменьшается (как результат уменьшения выходных напряжений ИП), а выходное напряжение усилителя ошибки DA4 растет (как результат увеличения ширины управляющих импульсов). Пока выходное напряжение усилителя DA3 превышает выходное напряжение усилителя DA4, оно является превалирующим и определяет уровень напряжения на неинвертирующем входе ШИМ-компаратора DA2, а значит, и ширину выходных импульсов, которая растет со скоростью, равной скорости уменьшения выходного напряжения усилителя DA3.
Однако наступает момент, когда убывающее выходное напряжение усилителя DA3 сравнивается с растущим выходным напряжением усилителя DA4. После этого выходное напряжение усилителя DA3 становится меньше, чем выходное напряжение усилителя DA4 и перестает влиять на ширину выходных импульсов микросхемы. Другими словами, в этот момент происходит "передача" управляющих функций от усилителя DA3 к усилителю DA4. Ширина выходных импульсов определяется теперь только выходным напряжением усилителя DA4, которое не зависит от уровня выходных напряжений преобразователя и сигнала обратной связи на выводе 1 микросхемы. Поэтому увеличение ширины выходных импульсов прекращается.
Параметры элементов схемы рассчитываются таким образом, чтобы ограничение происходило на безопасном для транзисторов инвертора уровне. При этом скорость, с которой система переходит в режим ограничения, а также уровень этого ограничения, зависят от наличия и глубины обратных связей, которые могут организовываться с помощью внешних RC-цепочек в различной комбинации, охватывающих усилитель ошибки DA4.
Далее микросхема переходит в специфический режим работы называемый режимом ограничения. Этот режим характеризуется тем, что ширина управляющих импульсов на выходах микросхемы неизменна и не зависит от уровня выходных напряжений ИП.
Другими словами, механизм ШИМ в режиме ограничения отключается (не действует).
Если КЗ в нагрузке самоустранилось по истечении некоторого времени, то накопительные конденсаторы вторичной стороны быстро заряжаются. Поэтому сигнал обратной связи, поступающий на неинвертирующий вход усилителя DA3, начинает возрастать. Следовательно, начинает возрастать и выходное напряжение DA3. Когда это напряжение достигнет уровня выходного напряжения усилителя DA4, то вновь произойдет передача управления, и управляющие функции перейдут от усилителя DA4 к усилителю DA3.
Если КЗ в нагрузке не самоустранилось, то поскольку имеет место режим ограничения, микросхема не в состоянии поддерживать напряжения на выходных шинах ИП. Поэтому выходные напряжения ИБП быстро уменьшаются, что приводит к срабатыванию механизма защитного отключения.
Защитное отключение, как было показано выше, имеет своим результатом прекращение протекания тока через силовые транзисторы и первичную обмотку импульсного трансформатора. Поэтому сигнал от токового датчика, поступающий на усилитель ошибки DA4, становится равным 0. Схема ИП приходит в исходное состояние. Поэтому срабатывает схема пуска и преобразователь попытается вновь выйти в номинальный режим. Если за это время КЗ в нагрузке самоустранилось, то выход на режим ничем не будет отличаться от первоначального запуска при включении ИП в сеть. Если же КЗ не самоустранилось, то процессы повторятся, и ИП перейдет в специфический аварийный «икающий» режим, который представляет собой периодически повторяющийся процесс защитного отключения.
В качестве датчика ширины управляющих импульсов могут использоваться разные элементы. Информацию о ширине управляющих импульсов можно получить как с первичной, так и со вторичной стороны ИП. Поэтому традиционными являются два основных способа, которые позволяют получить желаемый эффект контроля при минимальных затратах и простоте схемотехнической реализации.
Первый из этих способов заключается в том, что управляющие импульсы снимаются либо со средней точки первичной обмотки управляющего трансформатора, либо со специальной дополнительной обмотки этого трансформатора, которые находятся на вторичной стороне ИП. Далее из этой импульсной последовательности выделяется постоянная составляющая. Уровень этой составляющей и несет в себе информацию о ширине управляющих импульсов.
Способ получения информации о ширине управляющих импульсов с первичной стороны ИП заключается в том, что в цепь протекания тока первичной обмотки силового импульсного трансформатора последовательно включается первичная (токовая) обмотка трансформатора тока. Применение в качестве датчика такого элемента как трансформатор объясняется необходимостью гальванической развязки вторичной стороны ИП от первичной.
Ток через первичную обмотку силового импульсного трансформатора имеет импульсную форму, причем ширина токовых импульсов определяется временем открытого состояния силовых транзисторов инвертора, т.е. шириной управляющих импульсов на базах этих транзисторов. Поэтому напряжение на нагрузке вторичной обмотки трансформатора тока также будет импульсным, причем длительность этих импульсов будет равна длительности управляющих импульсов, вырабатываемых микросхемой. Далее, как и в первом случае, из этого импульсного напряжения выделяется постоянная составляющая (посредством выпрямления и фильтрации). Уровень постоянной составляющей несет в себе информацию о ширине управляющих импульсов.
Контролируемый сигнал, уровень которого зависит от ширины управляющих импульсов, подается на один из двух входов усилителя ошибки DA4. На второй вход этого усилителя для сравнения подается эталонное напряжение, уровень которого выбирается для каждой конкретной схемы ИП исходя из построения всей защитной схемы в целом. Этот уровень лежит в диапазоне от 0 (в этом случае опорный вход усилителя DA4 заземлен) до +5 В (в этом случае на опорный вход усилителя DA4 подается напряжение Uref). Если опорный уровень выбирается внутри этого диапазона, то к шине Uref подключается резистивный делитель и опорное напряжение необходимого уровня снимается с него. В качестве опорного входа обычно выбирается неинвертирующий вход усилителя DA4 (вывод 16 микросхемы), а контролируемый сигнал подается на инвертирующий вход (вывод 15). Однако возможен и обратный вариант включения усилителя DA4. При этом основным правилом, которое необходимо соблюсти при построении схемы ограничения, является то, что с ростом ширины управляющих импульсов выходное напряжение усилителя DA4 должно расти.
Практические схемы ИП на основе управляющей микросхемы TL494 могут быть построены как с использованием обоих защитных механизмов, так и с использованием только одного из них. В схемах, использующих оба механизма, при повышенном токопотреблении в нагрузке сильноточных каналов сначала имеет место режим ограничения ширины управляющих импульсов, и лишь то-лько затем, если КЗ продолжает развиваться, наступает защитное отключение.
В схемах с использованием только механизма защитного отключения чрезмерная ширина управляющих импульсов сразу вызывает защитное отключение. Сигнал с датчика ширины управляющих импульсов в этих схемах подается на неинвертирующий вход какого-либо из компараторов DA1, DA2. Так как механизм ограничения в этих схемах не используется, то усилитель ошибки DA4 становится не нужен. Поэтому его принудительно выставляют в состояние жесткого нуля по выходу с тем, чтобы его выходное напряжение не влияло бы на входное напряжение ШИМ-компаратора DA2 ни при каких условиях. Для этого на инвертирующий вход DA4 (вывод 15) сразу при включении ИП подается опорное напряжение Uref с вывода 14, а неинвертирующий вход (вывод 16) заземляется.
Отказ от использования механизма ограничения при построении комбинированной защиты принципиально возможен, т.к. в архитектуре самой управляющей микросхемы уже заложено ограничение максимальной ширины выходного импульса. Уровень этого ограничения определяется потенциалом на выводе 4 микросхемы в установившемся режиме, а также источником напряжения DA7 (0,1 В), подключенным между выводом 4 и неинвертирующим входом компаратора DA1. Таким образом, внешняя схема ограничения (если она имеется) дублирует внутреннюю схему, повышая надежность работы ИП и уменьшая вероятность выхода из строя силовых транзисторов инвертора.
Также существует защита от выходного перенапряжения. Датчиком схемы защиты от выходного перенапряжения обычно является пороговая схема, состоящая из стабилитрона с соответствующим пробивным напряжением и балластного резистора. Стабилитрон подключается к шине контролируемого напряжения. При превышении этим напряжением заданного расчетного уровня стабилитрон пробивается, и на балластном резисторе появляется потенциал как результат протекания по нему тока стабилитрона. Появление этого потенциала используется как сигнал на срабатывание для схемы защитного отключения.
Наличие всех перечисленных защитных схем в преобразователе напряжения не является обязательным. Некоторые из них могут отсутствовать.
Таким образом, рассмотрены все узлы импульсного преобразователя напряжения на микросхеме TL494 и принципы их построения.
ЗАЩИТА - ВНИЗ 4.6. Схема «медленного пуска»
Схема пуска предназначена для получения напряжения, которым можно было бы запитать управляющую микросхему с целью ее запуска после включения ИВЭП в питающую сеть. Поэтому под пуском подразумевается запуск в работу в первую очередь управляющей микросхемы, без нормального функционирования которой невозможна работа силовой части и всей схемы ИВЭП в целом. Схема пуска может быть построена двумя различными способами: с самовозбуждением; с принудительным возбуждением.
При включении ИВЭП конденсаторы выходных фильтров еще не заряжены. Поэтому транзисторный преобразователь работает фактически на короткозамкнутую нагрузку. При этом мгновенная мощность на коллекторных переходах мощных транзисторов может превышать в несколько раз среднюю мощность, потребляемую от сети. Это происходит из-за того, что действие обратной связи при запуске приводит к превышению тока транзисторов по сравнению с допустимым. Поэтому необходимы меры обеспечения «плавного» («мягкого» или «медленного») пуска преобразователя. В рассматриваемых ИВЭП это достигается путем плавного увеличения длительности включенного состояния мощных транзисторов вне зависимости от сигнала обратной связи, который «требует» от схемы управления максимально возможной длительности управляющего импульса сразу при включении ИВЭП. То есть коэффициент заполнения импульсного напряжения в момент включения принудительно делается очень малым и затем плавно увеличивается до необходимого.
«Медленный пуск» позволяет управляющей микросхеме постепенно увеличивать длительность импульсов на выводах 8 и 11 до выхода ИВЭП в номинальный режим.
Во всех ИВЭП на основе управляющей ИС типа TL494CN схема «медленного пуска» реализуется при помощи RC-цепочки, подключенной к не инвертирующему входу компаратора «мертвой зоны» DA1 (вывод 4 микросхемы).
Рассмотрим работу схемы пуска ИВЭП (рис. 34, рис. 35).
«Медленный пуск» осуществляется в данной схеме благодаря RC-цепочке С19, R27, подключенной к выводу 4 управляющей микросхемы.
Прежде чем рассматривать работу схемы «медленного пуска» необходимо ввести понятие об алгоритме запуска ИВЭП. Под алгоритмом запуска подразумевается последовательность появления напряжений в схеме ИВЭП. В соответствии с физикой работы первоначально всегда появляется выпрямленное напряжение сети Uep. Затем, как результат срабатывания схемы пуска, появляется напряжение питания управляющей микросхемы Upom. Результатом подачи питания на микросхему является появление выходного напряжения внутреннего стабилизированного источника опорного напряжения Uref. Лишь только после этого появляются выходные напряжения блока. Последовательность появления этих напряжений не может быть нарушена, т.е. Uref, например, не может появиться раньше, чем Upom и т.д.
При этом необходимо обратить особое внимание на то, что процесс первоначального запуска ИВЭП и процесс «медленного пуска» – это разные процессы, протекающие последовательно во времени! При включении ИВЭП в сеть сначала происходит первоначальный запуск, а уже потом – «медленный пуск», облегчающий силовым транзисторам блока выход в номинальный режим.
Как уже отмечалось, конечной целью процесса «медленного пуска» является получение плавно нарастающих по ширине выходных управляющих импульсов на выводах 8 и 11. Ширина выходных импульсов определяется шириной импульсов на выходе логического элемента DD1 ИC (см. рис.34, рис.35).
Временные диаграммы, поясняющие процесс плавного (мягкого) запуска ИВЭП и иллюстрирующие работу управляющей ИС TL494 в пусковом режиме приведены на рис. 84: U3, U4, U5 - напряжения на выводах ИС 3, 4 и 5 соответственно.
Пусть в момент времени t0 на управляющую микросхему ИC подается напряжение питания Upom. В результате запускается генератор пилообразного напряжения DA6, и на выводе 14 появляется опорное напряжение Uref.
Пилообразное выходное напряжение генератора (рис. 84) поступает на инвертирующие входы компараторов DA1 и DA2.
На инвертирующий вход ШИМ-компаратора DA2 подается выходное напряжение усилителя ошибки DA3. Так как выходные напряжения блока (в том числе и +5 В) еще отсутствуют, то сигнал обратной связи, снимаемый с делителя R29, R30 и подаваемый на не инвертирующий вход усилителя ошибки, равен 0 (рис. 35)
На инвертирующий вход этого усилителя подается некое положительное напряжение, снимаемое с делителя R23, R24 в цепи шины опорного напряжения Uref, которое уже имеется.
Поэтому выходное напряжение усилителя ошибки DA3 будет равно 0 в первоначальный момент, а по мере заряда выходных конденсаторов фильтров - будет нарастать.
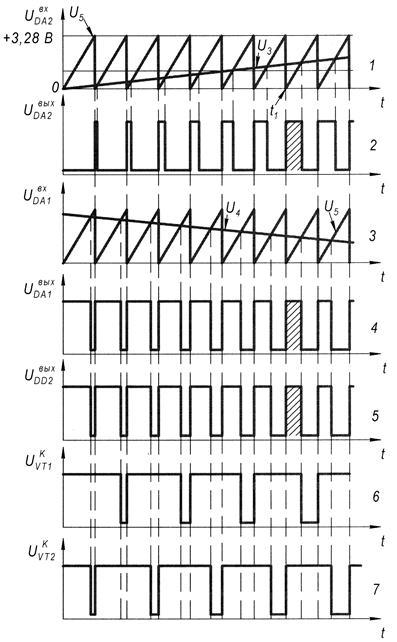 Рис. 84
Рис. 84
|
Выходное напряже-ние ШИМ-компаратора DA2 по этой причине бу-дет представлять собой нарастающую по ширине последовательность импу-льсов. Этот процесс ото-бражен на временных диа-граммах 1 и 2 (рис. 84).
Неинвертирующий вход компаратора "мерт-вой зоны" DA1, подклюю-чен к 4 выводу ИC.
К этому выводу подклюю-чается внешняя RC-цепь С19, R27, которая запиты-вается с шины опорного напряжения Uref. Поэтому при появлении Uref все оно в первый момент выде-ляется на резисторе R27, т.к. конденсатор С19 полностью разряжен. По мере заряда С19 ток через него и резистор R27 уменьшается. Поэтому па-дение напряжения на R27, которое подается на вывод 4 ИC, имеет форму спадающей экспоненты. В соответствии с этим выхо-дное напряжение компа-ратора «мертвой зоны» DA1 будет представлять собой последовательность уменьшающихся по ширине импульсов. Этот процесс отображен на временных диаграммах 3 и 4 (рис. 84). Таким образом, процессы широтного изменения выходных напряжений компараторов DA1 и DA2 имеют взаимно противоположный характер.
Выходные напряжения компараторов являются входными для логического элемента DD1 (2-ИЛИ). Поэтому ширина импульса на выходе этого элемента определяется наиболее широким из входных импульсов.
Из временной диаграммы 5 (рис. 84), отображающей выходное напряжение DD1, видно, что вплоть до момента т. t1 ширина выходных импульсов компаратора DA1 превышает ширину выходных импульсов ШИМ-компаратора DA2. Поэтому переключения этого компаратора не влияют на ширину выходного импульса DD1, а значит и выходного импульса. Определяющим на интервале t0 - ti является выходное напряжение компаратора DA1. Ширина выходных импульсов ИC на этом интервале плавно нарастает, что видно из временных диаграмм 6 и 7 (рис.84).
В момент т.t1 выходной импульс компаратора DA1 сравнивается по ширине с выходным импульсом ШИМ-компаратора DA2. В этот момент происходит передача управления от компаратора DA1 к ШИМ-компаратору DA2, т.к. его выходные импульсы начинают превышать по ширине выходные импульсы компаратора DA1. За время t0 - ti выходные конденсаторы фильт-ров успевают плавно зарядиться, и блок успевает выйти в номинальный режим.
Таким образом суть схемотехнического решения проблемы «мягкого» запуска заключается в том, что на время зарядки конденсаторов выходных фильтров ШИМ-компаратор DA2 подменяется компаратором DA1, работа которого не зависит от сигнала обратной связи, а определяется специальной формирующей RC-цепочкой C19, R27.
Из рассмотренного выше материала следует, что перед каждым включением ИБП конденсатор формирующей RC-цепи (в данном случае С19) должен быть полностью разряжен, иначе «мягкий» запуск будет невозможен, что может привести к выходу из строя силовых транзисторов преобразователя. Поэтому в каждой схеме ИВЭП предусмотрена специальная цепь для быстрого разряда конденсатора формирующей цепочки при выключении ИВЭП из сети или при срабатывании токовой защиты.