Дискретные фильтры
Рис 1.10
Рис 1.9
Рис 1.8
Рис 1.6
Рис 1.5
Рис. 1.3
Любой из параметров A,  ,
,  – для передачи информации о входном сигнале модулятора
– для передачи информации о входном сигнале модулятора  , рис. 1.3 б.
, рис. 1.3 б.
Если  – амплитудная модуляция,
– амплитудная модуляция,
 – частотная модуляция,
– частотная модуляция,
 – фазовая модуляция.
– фазовая модуляция.
Наибольшее распространение получила амплитудная модуляция системы на несущей частоте.
 – гармонические колебания с частотой , амплитуда которых пропорциональна входному сигналу , рис. 1.3 в.
– гармонические колебания с частотой , амплитуда которых пропорциональна входному сигналу , рис. 1.3 в.
Системы с дискретной модуляцией называются дискретными системами. Они содержат хотя бы один дискретный элемент ДЭ – дискретный модулятор, выходная величина которого изменяется дискретно при непрерывном изменении входной величины.
В зависимости от характера квантования все ДЭ могут быть разбиты на релейные, импульсные, релейно-импульсные (или цифровые).
Соответственно различают амплитудно-импульсную модуляцию , широтно-импульсную  , частотно-импульсную .
, частотно-импульсную .
Различают три вида квантования сигналов: по уровню; по времени; по уровню и времени (совместно).
Квантование по уровню заключается в фиксации вполне определенных дискретных значений непрерывного сигнала, рис. 1.4 а. При этом непрерывный сигнал (тонкая линия) заменяется ступенчато изменяющимся сигналом (жирная линия). Смежные дискретные значения отличаются друг от друга на постоянную величину  , называемую интервалом квантования по уровню. Переход с одного уровня на другой происходит в моменты времени, когда непрерывный сигнал достигает очередного фиксированного значения.
, называемую интервалом квантования по уровню. Переход с одного уровня на другой происходит в моменты времени, когда непрерывный сигнал достигает очередного фиксированного значения.
Квантование по времени заключается в фиксации мгновенных значений непрерывного сигнала в равноотстоящие друг от друга дискретные моменты времени (рис. 1.4, б). При этом квантованный по времени сигнал представляет собой так называемую решетчатую функцию — последовательность идеальных импульсов. Смежные моменты времени отличаются друг от друга на постоянную величину  , называемую интервалом дискретности (интервалом квантования по времени, периодом повторения).
, называемую интервалом дискретности (интервалом квантования по времени, периодом повторения).

Рис. 1.4Виды квантования и модуляции непрерывного сигнала
При совместном квантовании по уровню и по времени фиксируются дискретные по уровню значения, ближайшие к значениям непрерывного сигнала в дискретные моменты времени причем приоритетным является квантование по времени, рис. 1.4 в.
В зависимости от применяемого вида квантования все дискретные системы разделяют на три класса: релейные, импульсные и цифровые. В релейных системах квантование осуществляется только по уровню, в импульсных — по времени, а в цифровых — и по уровню и по времени.
Квантование по уровню производится специальными элементами — квантователями. Простейшими квантователями являются двух- и трехпозиционные реле. Они квантуют непрерывный сигнал соответственно по двум и трем уровням. Такие элементы называют релейными.
При достаточно большом числе уровней и малом интервале квантования, обеспечиваемых в УВМ, релейную систему можно приближенно рассматривать как непрерывную.
Квантование по времени осуществляется с помощью импульсного элемента. Импульсный элемент преобразует непрерывный входной сигнал в последовательность импульсов, амплитуда, длительность или период повторения которых зависят от значений входного сигнала в дискретные моменты времени. При этом преобразующее действие квантователя можно рассматривать как процесс модуляции последовательности одинаковых импульсов по закону изменения входного непрерывного сигнала, а сам квантователь по времени — как импульсный модулятор.
В зависимости от того, какой из параметров модулируемой последовательности импульсов изменяется по закону изменения модулирующего сигнала  , различают модуляции: амплитудно-импульсную (АИМ), широтно-импульсную (ШИМ) и частотно-импульсную (ЧИМ). При АИМ значениям модулирующего сигнала пропорциональны амплитуды (высоты) импульсов
, различают модуляции: амплитудно-импульсную (АИМ), широтно-импульсную (ШИМ) и частотно-импульсную (ЧИМ). При АИМ значениям модулирующего сигнала пропорциональны амплитуды (высоты) импульсов  (рис. 1.4 г):
(рис. 1.4 г):

при ШИМ — длительности  импульсов (рис. 1.4, д):
импульсов (рис. 1.4, д):

и при ЧИМ — частота  импульсов (рис. 1.4, е):
импульсов (рис. 1.4, е):
 ;
;
где  — частота дискретизации или частота повторения. Совместное квантование сигналов по уровню и по времени в цифровых системах осуществляется при помощи АЦП. В АЦП кроме квантования по уровню и по времени происходит кодирование дискретных значений сигнала — представление их в виде последовательности чисел и запись в каком-либо цифровом коде.
— частота дискретизации или частота повторения. Совместное квантование сигналов по уровню и по времени в цифровых системах осуществляется при помощи АЦП. В АЦП кроме квантования по уровню и по времени происходит кодирование дискретных значений сигнала — представление их в виде последовательности чисел и запись в каком-либо цифровом коде.
Отметим, что при сравнительно большом шаге квантования по уровню цифровая система существенно нелинейна, а при достаточно малом шаге дискретностью по уровню можно пренебречь и рассматривать систему как линейную амплитудно-импульсную.
Дискретные системы управления с УВМ находят широкое применение в современной автоматике благодаря наличию следующих преимуществ перед непрерывными системами.
Дискретное управляющее устройство можно использовать для одновременного управления несколькими однотипными объектами. Для этого оно поочередно с периодом повторения Т подключается к каждому объекту. Импульсные и цифровые элементы, входящие в дискретные системы управления, обеспечивают более высокую точность передачи и преобразования сигналов. Системы управления, скомплектованные из дискретных элементов, имеют, как правило, меньшие габаритные размеры, массу и стоимость. Они надежнее и лучше защищены от помех. Дискретные элементы более удобны для агрегатно-блочного построения систем. Наконец, цифровые вычислительные устройства могут реализовать более сложные и следовательно, более гибкие законы управления.

а) б)
Рассмотрим амплитудно-импульсную модуляцию, рис. 1.5 а.
Примером может служить периодически замыкаемый и размыкаемый контакт электрической цепи, допустим, контакт электромагнитного реле, обмотка которого питается периодически изменяющимся напряжением  , рис. 1.5. В период замыкания контакта выходная величина
, рис. 1.5. В период замыкания контакта выходная величина  изменяется по закону входной
изменяется по закону входной  , рис. 1.6.
, рис. 1.6.

Релейно-импульсный элемент РИЭ – устройство, осуществляющее квантование входного сигнала по уровню и по времени, и представляющее собой последовательное соединение ИЭ и РЭ.

Рис 1.7
Осуществляется импульсно-кодовая модуляция сигналов и выходной сигнал представляется в виде кода.
Кодирование позволяет повысить точность и помехозащищенность передачи информации. Устройство, преобразующее непрерывный сигнал в цифровой код (чаще всего в двоичный код) – аналого-цифровой преобразователь АЦП.
Общее для импульсных и цифровых систем – наличие квантования по времени. Они отличаются от непрерывных наличием ИЭ.
Любая дискретная система представляется в виде совокупности ИЭ и НЧ, рис. 1.8
НЧ – все элементы и устройства непрерывного действия.

ЭВМ выполняет функции задающего, сравнивающего и корректирующего устройств.
В общем случае ЦЭВМ, рис. 1.9.

Импульсный элемент ИЭ символизирует дискретный характер входных сигналов ЭВМ, ДФ – устройство, имитирующее процесс выработки управляющих сигналов (процесс изменения закона модуляции импульсов, поступающих на его вход), РЭ – учитывает эффект квантования сигналов по уровню, Э – характеризует процесс преобразования дискретных значений управляющего сигнала в непрерывный сигнал.
Часто квантованием по уровню пренебрегают, и цифровые системы относят к импульсным. Характерная особенность импульсных систем, эквивалентных цифровым, – наличие ДФ и Э.
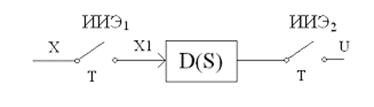
Функциональная схема цифровой системы, рис. 1.10.

Методика перехода от функциональных схем к структурным та же, что и для непрерывных систем, однако надо учитывать свойства ИЭ, ДФ и Э.
На вход ДФ – поступает последовательность модулированных  -функций. В соответствии с алгоритмом управления ДФ изменяет закон модуляции последовательности входных импульсов, не изменяя дискретный характер. Выходом ДФ является последовательность -функций. ДФ в виде эквивалентной структурной схемы, состоящей из непрерывного звена с передаточной функцией
-функций. В соответствии с алгоритмом управления ДФ изменяет закон модуляции последовательности входных импульсов, не изменяя дискретный характер. Выходом ДФ является последовательность -функций. ДФ в виде эквивалентной структурной схемы, состоящей из непрерывного звена с передаточной функцией  , на выходе – ИИЭ2, работающим синхронно с входным ИИЭ1. Время, затрачиваемое на вычисления, мало по сравнению с периодом дискретности
, на выходе – ИИЭ2, работающим синхронно с входным ИИЭ1. Время, затрачиваемое на вычисления, мало по сравнению с периодом дискретности  , рис. 1.11.
, рис. 1.11.