Лекция 8. Принцип возможных перемещений и общее уравнение динамики.
Рис.62
Рис.61
Рис.60
Рис.59
Рис.58
На рис.58 изображено сечение тела плоскостью, параллельной плоскости движения и проходящей через центр масс С. Пусть на тело действуют внешние силы  ,
,  ,...
,... , лежащие в плоскости этого сечения. Тогда уравнения движения точки С найдём по теореме о движении центра масс
, лежащие в плоскости этого сечения. Тогда уравнения движения точки С найдём по теореме о движении центра масс 
 ,
,
а вращательное движение вокруг центра С будет определятся уравнением
 ,
,
т.к. теорема, из которой получено это уравнение, справедливо и для движения системы вокруг центра масс. В результате, проектируя обе части равенства на координатные оси, получим:
 ,
,  ,
,  ,
,
 ,
,  ,
, 
Эти уравнения представляют собой дифференциальные уравнения плоскопараллельного движения твёрдого тела. С их помощью можно по заданным силам определить закон движения тела или, зная закон движения тела, найти главный вектор и главный момент действующих сил.
При несвободном движении, когда траектория центра масс известна, уравнения движения точки С удобно составлять в проекциях на касательную  и главную нормаль n к этой траектории. Тогда получим:
и главную нормаль n к этой траектории. Тогда получим:
 ,
,  ,
,  ,
,
где  - радиус кривизны траектории центра масс.
- радиус кривизны траектории центра масс.
Пример 16. Однородный круглый цилиндр скатывается по наклонной плоскости (рис.59). Цилиндр совершает плоскопараллельное движение.
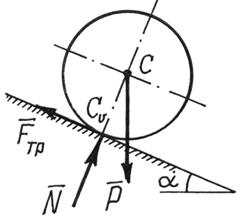
Так как  и, значит,
и, значит,  составим дифференциальное уравнение вращения относительно оси
составим дифференциальное уравнение вращения относительно оси  проходящей через мгновенный центр скоростей.
проходящей через мгновенный центр скоростей.
Момент инерции цилиндра относительно оси 

Поэтому уравнение получится таким  или
или 
Знак (–) указывает на направление углового ускорения – по часовой стрелке.
Обратим внимание на то, что реакции не вошли в уравнение.
Чтобы определить реакцию  , составим еще одно дифференциальное уравнение вращения, относительно центральной оси С :
, составим еще одно дифференциальное уравнение вращения, относительно центральной оси С :
Отсюда 
Конечно,  . Чтобы тело катилось без скольжения должно выполняться условие
. Чтобы тело катилось без скольжения должно выполняться условие  или
или  Поэтому коэффициент трения скольжения должен удовлетворять условию
Поэтому коэффициент трения скольжения должен удовлетворять условию 
Пример 17. Балочка АВ длиной l и весом Р падает, скользя концами по гладким поверхностям стены и пола (рис.60). Составим дифференциальное уравнение вращения.
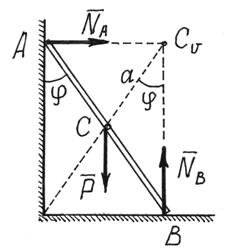
Здесь  Поэтому опять выгоднее составить дифференциальное уравнение вращения относительно оси . Тем более, что неизвестные реакции
Поэтому опять выгоднее составить дифференциальное уравнение вращения относительно оси . Тем более, что неизвестные реакции  и
и  не войдут в это уравнение.
не войдут в это уравнение.
Так как 
 то уравнение получится таким:
то уравнение получится таким: 
Отсюда 
Пример 18. Тело, имеющее форму половины кругового цилиндра, катается по горизонтальной плоскости без скольжения. Вес его – Р. Положение центра тяжести определяется расстоянием  момент инерции относительно оси О:
момент инерции относительно оси О: 
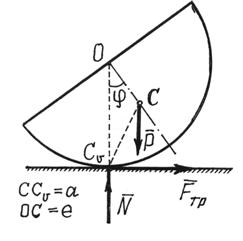
Поскольку неизвестны ни сила трения  ни нормальная реакция N, конечно следует составлять дифференциальное уравнение вращения относительно оси
ни нормальная реакция N, конечно следует составлять дифференциальное уравнение вращения относительно оси  .
.
Момент инерции тела относительно оси  по теореме Гюйгенса-Штейнера,
по теореме Гюйгенса-Штейнера,  , а
, а  , поэтому
, поэтому  .
.
Расстояние  производная
производная 
Количество движения 
Составляем дифференциальное уравнение:

или 
После подстановки значения  , получим
, получим

и, окончательно, подставив значение 

Пример 19. Стержень качался как маятник, вращаясь в вертикальной плоскости вокруг шарнира О. В момент, когда стержень был в вертикальном положении и угловая скорость его была  , шарнир разрушился. Определим дальнейшее движение стержня.
, шарнир разрушился. Определим дальнейшее движение стержня.
Стержень начнет совершать плоскопараллельное движение. На рис.62 показано его промежуточное положение.
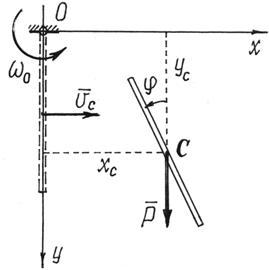
Составим дифференциальные уравнения движения.


 или
или 


Интегрируем их дважды:
 и
и 
Начальные условия: при t = 0
 ,
, 



Подставив их в последние шесть уравнений, получим 





Тогда уравнения плоскопараллельного движения стержня



Например, стержень займет горизонтальное положение,  , в момент
, в момент  когда центр масс его будет в точке с координатами
когда центр масс его будет в точке с координатами 

В данной лекции рассматриваются следующие вопросы:
1. Возможные перемещения. Классификация связей.
2. Принцип возможных перемещений при равновесии материальной системы. Общее уравнение статики.
3. Принцип возможных перемещений при движении материальной системы. Общее уравнение динамики
4. Обобщенные координаты.
5. Обобщенные силы.
6. Уравнения равновесия Лагранжа.
7. Обобщенные силы инерции.
8. Уравнения Лагранжа.