Изучение данных вопросов необходимо для изучения демпферов в дисциплине «Детали машин», для решения задач в дисциплинах «Теория машин и механизмов» и «Сопротивление материалов».
Лекция 7. Приложение общих теорем к динамике твердого тела.
Рис.53
Рис.52
Рис.51
Пусть две точки  и
и  неизменяемой системы (pис.51), действующие друг на друга с силами
неизменяемой системы (pис.51), действующие друг на друга с силами  и
и  (
( ) имеют в данный момент скорости
) имеют в данный момент скорости  и
и  . Тогда за промежуток времени dt эти точки совершат элементарные перемещения
. Тогда за промежуток времени dt эти точки совершат элементарные перемещения  и
и  , направленные вдоль векторов и . Но таккак отрезок
, направленные вдоль векторов и . Но таккак отрезок  является неизменяемым, то по известной теореме кинематики проекции векторов и ,а, следовательно, и перемещений
является неизменяемым, то по известной теореме кинематики проекции векторов и ,а, следовательно, и перемещений  и
и  на направление отрезка будут равны друг другу, т.е.
на направление отрезка будут равны друг другу, т.е.  . Тогда элементарные работы сил и будут одинаковы по модулю и противоположны по знаку и в сумме дадут нуль. Этот результат справедлив для всех внутренних сил при любом перемещении системы.
. Тогда элементарные работы сил и будут одинаковы по модулю и противоположны по знаку и в сумме дадут нуль. Этот результат справедлив для всех внутренних сил при любом перемещении системы.
Отсюда заключаем, что для неизменяемой системы сумма работ всех внутренних сил равна нулю и уравнения принимают вид
 или
или  .
.
2) Система с идеальными связями. Рассмотрим систему, на которую наложены связи, не изменяющиеся со временем. Разделим все действующие на точки системы внешние и внутренние силы на активные и реакции связей. Тогда
 ,
,
где  - элементарная работа действующих на k-ю точку системы внешних и внутренних активных сил, a
- элементарная работа действующих на k-ю точку системы внешних и внутренних активных сил, a  - элементарная работа реакций наложенных на ту же точку внешних и внутренних связей.
- элементарная работа реакций наложенных на ту же точку внешних и внутренних связей.
Как видим, изменение кинетической энергии системы зависит от работы и активных сил и реакций связей. Однако можно ввести понятие о таких «идеальных» механических системах, у которых наличие связей не влияет на изменение кинетической энергии системы при ее движении. Для таких связей должно, очевидно, выполняться условие:
 .
.
Если для связей, не изменяющихся со временем, сумма работ всех реакций при элементарном перемещении системы равна нулю, то такие связи называют идеальными. Для механической системы, на которую наложены только не изменяющиеся со временем идеальные связи, будем, очевидно, иметь
 или
или  .
.
Таким образом, изменение кинетической энергии системы с идеальными, не изменяющимися со временем связями при любом ее перемещении равно сумме работ на этом перемещении, приложенных к системе внешних и внутренних активных сил.
Механическая система называется консервативной (энергия ее как бы законсервирована, не изменяется), если для нее имеет место интеграл энергии
 или
или  (3)
(3)
Это есть закон сохранения механической энергии: при движении системы в потенциальном поле механическая энергия ее (сумма потенциальной и кинетической) все время остается неизменной, постоянной.
Механическая система будет консервативной, если действующие на нее силы потенциальны, например сила тяжести, силы упругости. В консервативных механических системах с помощью интеграла энергии можно проводить проверку правильности составления дифференциальных уравнений движения. Если система консервативна, а условие (3) не выполняется, значит при составлении уравнений движения допущена ошибка.
Интегралом энергии можно воспользоваться для проверки правильности составления уравнений и другим способом, без вычисления производной. Для этого следует после проведения численного интегрирования уравнений движения вычислить значение полной механической энергии для двух различных моментов времени, например, начального и конечного. Если разница значений окажется сопоставимой с погрешностями вычислений, это будет свидетельствовать о правильности используемых уравнений.
Все предыдущие теоремы позволяли исключить из уравнений движения внутренние силы, но все внешние силы, в том числе и наперед неизвестные реакции внешних связей, в уравнениях сохранялись. Практическая ценность теоремы об изменении кинетической энергии состоит в том, что при не изменяющихся со временем идеальных связях она позволит исключить из уравнений движения все наперед неизвестные реакции связей.
Теорему об изменении кинетической энергии удобно использовать при решении задач, в которых требуется установить зависимость между скоростями и перемещениями тел.
Пример 13. Какую скорость надо сообщить точке М стержня, прикрепленного верхним концом с помощью шарнира О к неподвижной поверхности (рис.52), чтобы стержень совершил четверть оборота?
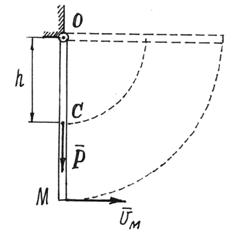
В первом, вертикальном, положении кинетическая энергия стержня, начавшего вращаться вокруг оси О,
 .
.
Во втором положении, где стержень достигнет горизонтального положения и остановится на мгновение, Т2 = 0.
Работу совершит только вес стержня Р:  По теореме получим уравнение
По теореме получим уравнение  , из которого следует
, из которого следует 
Пример 14. Механическая система состоит из двух шаров A и B, связанных с шарниром O и ползуном C невесомыми стержнями.
Массы шаров и ползуна одинаковы и равны  =0,2 кг. Стержни имеют одинаковую длину
=0,2 кг. Стержни имеют одинаковую длину  = 0,3 м. Между шарниром и ползуном установлена пружина жесткостью c =100 Н/м, длина которой в недеформированном состоянии равна (рис.53) Требуется определить зависимость скоростей движения шаров от угла отклонения стержней от вертикали
= 0,3 м. Между шарниром и ползуном установлена пружина жесткостью c =100 Н/м, длина которой в недеформированном состоянии равна (рис.53) Требуется определить зависимость скоростей движения шаров от угла отклонения стержней от вертикали  и найти максимальное отклонение, если в начальный момент времени система покоилась, а угол составлял
и найти максимальное отклонение, если в начальный момент времени система покоилась, а угол составлял  .
.
Кинетическая энергия системы складывается из кинетических энергий трех тел, которые по условию могут рассматриваться как материальные точки.
 (4)
(4)
Скорости шаров пропорциональны угловой скорости вращения стержней OA и OB

Скорость ползуна нетрудно определить, если учесть, что

Тогда
Подставляя выражения для скоростей в (4), получим зависимость кинетической энергии системы от скоростей шаров V и угла отклонения стержней
 . (5)
. (5)
Определим работу, которую совершат все силы, приложенные к системе при ее перемещении из начального положения в конечное. Работа сил тяжести определяется вертикальными перемещениями центров тяжести тел (см. рис.53):
 (6)
(6)
Для вычисления работы силы упругости воспользуемся формулой:
 (7)
(7)
Подставляя выражения (5), (6) и (7) в уравнение теоремы об изменении кинетической энергии, получаем зависимость скорости движения шаров от угла
или в явном виде
 (8)
(8)
Если в уравнении 8 скорость V приравнять нулю, можно найти два предельных значения угла , между которыми будет происходить движение системы при заданным начальных условиях:
В данной лекции рассматриваются следующие вопросы:
1. Принцип Даламбера.
2. Главный вектор и главный момент сил инерции твердого тела.
3. Вращательное движение твердого тела.
4. Физический маятник.
5. Плоскопараллельное движение твердого тела.