Потенциальная энергия
Рис.22
Рис.21
Рис.20
Рис.19
Тогда Рx=0, Рy=0, Pz= -Р. Подставляя эти значения и учитывая переменную интегрирования z:
 .
.
Если точка M0 выше М1, то  , где h-величина вертикального перемещения точки;
, где h-величина вертикального перемещения точки;
Если же точка M0 ниже точки M1то  .
.
Окончательно получаем:  .
.
Следовательно, работа силы тяжести равна взятому со знаком плюс или минус произведению модуля силы на вертикальное перемещение точки ее приложения. Работа положительна, если начальная точка выше конечной, и отрицательна, если начальная точка ниже конечной. Из полученного результата следует, что работа силы тяжести не зависит от вида той траектории, по которой перемещается точка ее приложения.
Силы, обладающие таким свойством, называются потенциальными.
2) Работа силы упругости. Рассмотрим груз М, лежащий на горизонтальной плоскости и прикрепленный к свободному концу некоторой пружины (рис.20,а). Отметим на плоскости точкой О положение, занимаемое концом пружины, когда она не напряжена ( - длина ненапряженной пружины), и примем эту точку за начало координат. Если теперь оттянуть груз от равновесного положения О, удлинив пружину до величины
- длина ненапряженной пружины), и примем эту точку за начало координат. Если теперь оттянуть груз от равновесного положения О, удлинив пружину до величины  , то на груз будет действовать сила упругости пружины F, направленная к точке О.
, то на груз будет действовать сила упругости пружины F, направленная к точке О.

По закону Гука величина этой силы пропорциональна удлинению пружины  . Так как в нашем случае
. Так как в нашем случае  , то по модулю
, то по модулю  .
.
Коэффициент сназывается коэффициентом жесткости пружины. В технике обычно измеряют величину с в H/см, полагая коэффициент с численно равным силе, которую надо приложить к пружине, чтобы растянуть ее на 1 см.
Найдем работу, совершаемую силой упругости при перемещении груза из положения  в положение
в положение  . Так как в данном случае
. Так как в данном случае  ,
,  , то получим:
, то получим:
 .
.
(Этот же результат можно получить по графику зависимости F от х (рис.20, б), вычисляя площадь  заштрихованной на чертеже трапеции и учитывая знак работы.) В полученной формуле
заштрихованной на чертеже трапеции и учитывая знак работы.) В полученной формуле  представляет собою начальное удлинение пружины
представляет собою начальное удлинение пружины  , а
, а  конечное удлинение пружины
конечное удлинение пружины  . Следовательно,
. Следовательно,
 ,
,
т.е. работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины.
Работа будет положительной, когда  , т. е. когда конец пружины перемещается к равновесному положению, и отрицательной, когда
, т. е. когда конец пружины перемещается к равновесному положению, и отрицательной, когда  , т.е. конец пружины удаляется от равновесия положения. Можно доказать, что формула остается справедливой и в случае, когда перемещение точки М не является прямолинейным.
, т.е. конец пружины удаляется от равновесия положения. Можно доказать, что формула остается справедливой и в случае, когда перемещение точки М не является прямолинейным.
Таким образом, оказывается, что работа силы F зависит только от значений и и не зависит от вида траектории точки М. Следовательно, сила упругости также является потенциальной.
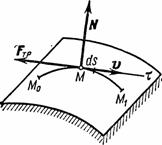
3) Работа силы трения. Рассмотрим точку, движущуюся по какой-нибудь шероховатой поверхности (рис. 21) или кривой. Действующая на точку сила трения равна по модулю fN, где f-коэффициент трения, а  -нормальная реакция поверхности. Направлена сила трения противоположно перемещению точки. Следовательно, Fтр=-fN и по формуле
-нормальная реакция поверхности. Направлена сила трения противоположно перемещению точки. Следовательно, Fтр=-fN и по формуле
 .
.
Если величина силы трения постоянна, то  , где s-длина дуги кривой М0М1 по которой перемещается точка.
, где s-длина дуги кривой М0М1 по которой перемещается точка.
Таким образом, работа силы трения при скольжении всегда отрицательна. Величина этой работы зависит от длины дуги М0М1 . Следовательно, сила трения является силой непотенциальной.
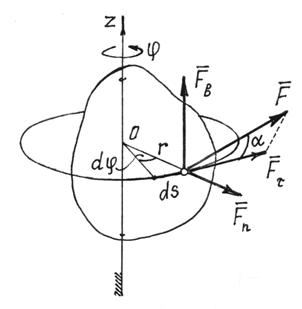
4) Работа силы, приложенной к телу, вращающемуся вокруг неподвижной оси.
В этом случае (рис.22) точка приложения силы  движется по окружности радиуса r. Элементарная работа, по (1),
движется по окружности радиуса r. Элементарная работа, по (1),  , где
, где  .
.
Поэтому  .
.
Но  .
.
Это нетрудно установить, разложив силу на три составляющие (рис. 22). (Моменты сил  и
и  равны нулю). Значит,
равны нулю). Значит,
 (2)
(2)
В частности, если момент силы относительно оси  , работа силы при повороте тела на угол
, работа силы при повороте тела на угол  равна
равна
 . (3)
. (3)
Знак работы определяется знаками момента силы и угла поворота. Если они одинаковы, работа положительная.
Из формулы (3) следует и правило определения работы пары сил. Если пара с моментом m расположена в плоскости перпендикулярной оси вращения тела, то ее работа при повороте тела на угол
 . (4)
. (4)
Если же пара сил действует в плоскости не перпендикулярной оси вращения, то ее надо заменить двумя парами. Одну расположить в плоскости перпендикулярной оси, другую – в плоскости параллельной оси. Моменты их определяются разложением вектора момента  по соответствующим направлениям:
по соответствующим направлениям:  . Конечно работу будет совершать только первая пара с моментом
. Конечно работу будет совершать только первая пара с моментом  , где
, где  – угол между вектором
– угол между вектором  и осью вращения z,
и осью вращения z,
 . (5)
. (5)
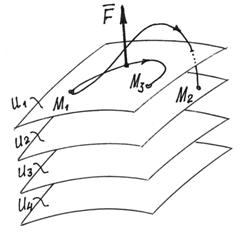
Часть пространства, в которой на помещенную туда материальную точку действует сила, зависящая от места положения точки, называется силовым полем.
Причем, эта сила определяется с помощью силовой функции u = u(x, y, z). Если она не зависит от времени, то такое поле называется стационарным. Если во всех точках она одинакова, то поле – однородное.
Если же проекции силы на декартовы оси есть частные производные от силовой функции по соответствующим координатам
 ,
,  ,
,  , (6)
, (6)
то такое поле называется потенциальным.
Вычислим работу силы потенциального поля при перемещении точки из положения М1 в положение М2. (рис. 23).