Коротко про розвиток робототехніки.
Розвиток робототехніки належить до глибокої стародавності людської діяльності. Ще в часи Гомера люди мріяли створити механічних помічників людини, що виконують його трудову діяльність. Гомер пише у своєму відомому творі "Іліада"
...Назустріч йому золоті служниці вмить підбігли,
Подібні до дів живих, у яких
Розум у груди укладений, і голос, і сила,
Яких всіляким працям навчили
Безсмертні боги...
Першими помічниками людини були механізми, що дозволяють збільшити його силу й швидкість переміщення. Навіть перші рахункові машини будувалися на механічному принципі. Однак уперше слово "робот" було уведено Карелом Чапеком в 1920 р. у фантастичній п'єсі "РУР" ("Расумскі універсальні роботи"). Областю застосування роботів стали області діяльності людини, небезпечні для його життєдіяльності. Як правило, це були дистанційно керовані маніпулятори для роботи в атомних реакторах, у підводних апаратах і космічних кораблях. В 1947 році в Арагонській національній лабораторії були вперше розроблені механічні руки для роботи з радіоактивними матеріалами. Уже в 1948 році дані роботи були оснащені системою відображення зусилля, щоб оператор мав можливість відчувати зусилля, що розвиває виконавчий орган. Перші місяцеходи й марсоходи були оснащені маніпуляторами для збору ґрунту. Керування даними маніпуляторами здійснювалося із землі по командах оператора. В 1963 році вже була досліджена проблема розпізнавання багатогранних об'єктів, а в 1968 році вже були створені програмні пристрої, що дозволяють із застосуванням телевізійної камери знаходити предмети, які повинен був взяти робот своїм захоплюючим пристроєм.
Таким чином, теоретичні основи сучасної робототехніки були закладені ще в 60-і роки, але їхня реалізація стримувалася відсутністю відповідних технологій, матеріалів, ресурсів обчислювальних систем. У цей же час фантаст Айзек Азимов придумує слово "роботикс" (робототехніка) і вперше формулює три закони робототехніки:
1. Робот не може заподіяти шкоду людині або своєю бездіяльністю допустити, щоб людині була заподіяна шкода.
2. Робот повинен підкорятись командам людини, якщо ці команди не суперечать першому закону.
3. Робот повинен піклуватися про свою безпеку, поки це не суперечить першому й другому законам.
Ці три закони Айзека Азимова до сьогоднішнього дня залишаються стандартами при проектуванні й розробці роботів.
Робототехніка ХХ століття характеризується видатними практичними досягненнями.

Рис. 1.3. Луноход1
1. Радянські луноходи скорили Місяць. 17 листопада 1970 року Луноход-1 (апарат 8ЕЛ, вага 756 кг, довжина з відкритою кришкою сонячної батареї 4,42 м, ширина 2,15 м, висота 1,92 м) з'їхав з посадкового щабля на місячний ґрунт у Море Дощів (рис. 1.3). Він став п'ятим рухливим утворенням на Місяці після Армстронга, Олдрина, Конрада й Бина. Луноход-1 активно функціонував 301 добу 06 годин 37 хв, пройшов відстань 10 540 м, обстежив площу в 80 000 м2, за допомогою телесистем передав понад 20 000 знімків поверхні й більше 200 панорам, більш ніж в 500 точках поверхні визначив фізико-механічні властивості поверхневого шару місячного ґрунту, а в 25 точках провів його хімічний аналіз. Луноход-2 у складі станції Е-8 № 204 (Eyna-21) був запущений 8 січня 1973 року. Останнє повідомлення ТАРС про рух апарата було датовано 9 травня. Говорилося, що місяцехід почав рух від розламу Прямої на схід до мису Далекий. Зважаючи на все, у цей день було пройдено лише 800 м. Там місяцехід і залишився. Погубив його кратер. Луноход-2 зміг перевищити відпущені йому ресурсом три місяці.
2. Два витки навколо Землі й автоматична посадка безпілотного орбітального корабля "Буран", виведеного наприкінці 1988 року на навколоземну орбіту за допомогою самої потужної у світі ракети-носія "Енергія" - це "заключний акорд" російської космонавтики на фініші радянської епохи. Найбільше захватів викликало приземлення "Бурану" наприкінці польоту на посадковій смузі, виконане з ювелірною точністю.
3. Промислові роботи. Широке впровадження роботів у виробничій сфері почалося в сімдесяті роки минулого сторіччя. У сфері виробництва застосовувалися промислові роботи, керовані автоматично від систем числового програмного керування. Виконання транспортних операцій при штампуванні, точкове й дугове зварювання виконувалися за допомогою роботів з позиційною й контурною системами керування. Уже на операціях дугового зварювання знайшли застосування датчики спостереження за зварюємим стиком. Застосування елементів адаптації дозволило розширити можливості промислових роботів. Особливе місце займають промислові роботи на складальних операціях, особливо, при зборці елементів електронної промисловості. Оптичні датчики контролю дозволили виконувати сортування виробів по етикетках або особливих мітках. За допомогою силового зворотного зв'язку Г. Иноу вдалося створити систему керування промислового робота, здатного вставляти вал в отвір за інформацією про зусилля, що розвивається при торканні.
Зараз існує множина працюючих промислових роботів. Фірми ABB, STAUBLІ, REІS, MOTOMAN, ADEPT й інші виробляють промислові роботи для маніпулювання, зварювання, фарбування, упакування, шліфування, полірування й т.д. з великим спектром застосування й по точності, і по характері виконуваних операцій.
В області робототехніки також відбувається зміна поколінь. У книзі И. М. Макарова і Ю. И. Топчієва виділяються 4 покоління промислових роботів:
1. Роботи із циклічним керуванням без зворотного зв'язку, що виконують неодноразово однакові операції.
2. Роботи зі зворотним зв'язком, що виконують різні операції.
3. Навчаємі роботи. Навчання таких роботів руху по різних траєкторіях і різних захопленнях здійснює оператор.
4. Інтелектуальні роботи. Такі роботи можуть знаходити потрібні деталі, оцінювати обстановку й приймати найкращі рішення.
4. Досягнення серед роботів у загальноприйнятому розумінні, що розуміється: "Машина з антропоморфною (людиноподібною) поведінкою", яка частково або повністю виконує функції людини при взаємодії з навколишнім світом. З них відзначимо наступні.
В 1977 році фірмою Quasar Іndustrіes створений робот, що вміє підмітати підлогу, стригти траву на галявинах і готовити просту їжу. Корпорація Object Recognіtіon Systems оголосила в 1982 році про створення системи зору для роботів, що дозволяє їм виймати деталі, довільно розташовані в ящиках або інших ємностях. В 1982 році фірма Mіtsubіshі оголосила про робота, що був настільки спритний, що прикурював сигарету й знімав слухавку. Самим чудовим в 1982 році був визнаний американський робот Cubot, що збирає за допомогою своїх механічних пальців, камери-ока й комп'ютера-мозку кубик Рубика менш чим за чотири хвилини.
Поява перших роботів дало потужний поштовх до розвитку таких напрямків, як машинний зір і розпізнавання зображень, побудова методів моделювання станів миру, побудова планів для послідовності дій і керування виконанням цих планів, керування роботою роботів у тривимірному просторі. Інтелект роботів постійно підвищується зі створенням більш досконалих людино-машинних інтерфейсів. Істотно розширюється діапазон їхнього застосування.
Японська корпорація Sony оголосила в 2000 році про створення нового покоління собак, які розуміють на слух близько 50 команд і навіть можуть фотографувати те, що бачать своїми очами-камерами. Новий робот одержав те ж ласкаве ім'я "Айбо", що й перше покоління розумних електронних собачок, що з'явилися на ринку роком раніше. До вміння стрибати, бігати, виляти хвостиком, катати м'ячик і демонструвати різні почуття - від страху до щенячої радості, чотириногий робот нового покоління додав здатність реагувати на кличку, що привласнює йому хазяїн, подавати лапу, сідати й бігти вперед. По особливій вказівці він фотографує очами-камерами й отриману картинку потім можна подивитися на екрані комп'ютера. Новий "Айбо", більше схожий на левеня, чим на щеня, коштує 150 тисяч ієн (близько 1,4 тис. дол.).
У квітні 2003 року в Японії, у місті Иокогамае, пройшла четверта по рахунку виставка роботів "Robodex" (рис. 1.4). Як заведено, виставляються на ній так називані персональні железяки: домогосподарки, роботи-клоуни й роботи-охоронці. Абревіатура в назві заходу розшифровується ні багато ні мало як "робот твоєї мрії" (Robot Dream Exposіtіon). Цвяхом виставки став робот SDR-4X фірми Sony. Творці намагаються зберегти за ним репутацію масовика-витівника: у нову модель закладені 10 пісень, 1000 тілорухів й 200 інтерактивних діалогів. Неясним залишається питання: хто буде платити за нього нечувану ціну "машини класу люкс".
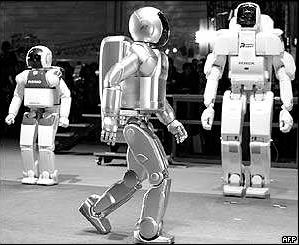
Рис. 1.4. На виставці "Robodex"
У Японії проводяться щорічні чемпіонати світу з футболу серед роботів - RoboCup. Змагання проводяться в декількох лігах. У лізі малих роботів (small sіze) грають машини розміром 15 × 18 сантиметрів, які управляються зовнішньою комп'ютерною системою. В іграх у лізі середніх роботів (mіddle sіze) беруть участь могутніші автономні роботи розміром 50 × 50 сантиметрів, оснащені власним потужним бортовим комп'ютером і системою технічного зору. З недавніх пор уведена ще одна ліга, у ній грають робособаки, яких виробляє компанія Sony. В 2002 році своєрідне змагання проходило серед "андроидов". Правда, дійсного футболу в їхньому виконанні побачити не вдалося: технологія ходьби пророблена поки досить слабко, так що "андроиды" змагалися в пробиванні штрафних й умінні ходити.
Міжнародні змагання мобільних роботів, у тому числі по футболу, і Науково-технічний Фестиваль молоді "Мобільні роботи" імені професори Е. А. Девянина проводяться в Москві на базі Інституту механіки Московського державного університету ім. М. В. Ломоносова, починаючи з 1998 року (http://www.robot.ru). Молодіжна команда Московського Державного Університету бере участь у міжнародних змаганнях робототехнічних систем з 1995 року. Виступи команди МГУ у Франції в рамках міжнародного Фестивалю "Наук і технологій" були успішними: в 1996 й 1998 роках команда посідала перші місця. У розробці роботів і підготовці молодіжних команд із 1995 року брали участь Д. Е. Охоцимский, В. М. Буданов, Е. В. Гурфинкель, Е. А. Девянин, Д. Н. Жихарев, А. В. Ленский, з 1997 року - А. А. Голован і А. А. Гришин.
В 2004 році пройшли перегони автомобілів без водіїв Grand Challenge від Лос-Анджелеса до Лас-Вегаса - це одне зі значних подій у робототехніці. До участі в змаганні допускалися тільки безпілотні роботи - на їхньому борті не повинно бути ні людей, ні тварин. На участь у змаганнях було заявлено біля сотні команд, 25 з них були допущені до кваліфікаційного відбору й 15 з них цей відбір пройшли. Організатори змагань залишилися задоволені результатами, незважаючи на те, що жоден робот не пройшов трасу. Наступна спроба призначалась на 2006 рік.
За останні кілька років Пентагон значно збільшив фінансування проектів по створенню бойових роботів. Гроші виділяються як великим оборонним корпораціям, так і невеликим дослідницьким групам в американських університетах. Причиною такої активності військового відомства США є негативна реакція американського суспільства на велику кількість жертв серед солдатів під час воєнних операцій Пентагона за рубежем.
У квітні 2004 року американський виробник роботів іRobot Corporatіon одержав першу похоронку - під час бойових дій в Іраку був зруйнований робот-сапер PackBot. Представники компанії іRobot, що базується в місті Берлингтон, штат Массачусетс, одержали від Пентагона офіційне повідомлення про те, що робот PackBot був знищений супротивником під час бойових дій (робот вибухнув на міні, від якої могла постраждати людина). У цей час в Іраку й Афганістані перебувають від 50 до 100 роботів-саперів типу PackBot. Їх використають для рекогносцировки, ліквідації мінних полів, знищення боєприпасів супротивника. Ця модель пристосована до дій в умовах складного ландшафту. Кожен з цих роботів важить близько 21 кг і коштує майже 50 тис. дол.
Американські марсоходи Spіrіt й Opportunіty провели в 2004 році наукову місію по дослідженню Червоної планети. Обидва апарати досліджували метеоритні кратери, вели пошук цікавих об'єктів для докладного вивчення, виявили свідчення наявності води на Марсі.
Перелік дивних досягнень в області робототехніки можна продовжувати дуже довго. З'являється велика кількість науково-технічної літератури по робототехніці для фахівців і студентів, як побудувати робот, починаючи від механіки, датчиків і закінчуючи радіоуправлінням і програмуванням. Все це підтверджує впевненість у тім, що самі цікаві досягнення в цій області ще попереду.