Енергозберігаючі системи регульованого електропривода змінного струму.
Основними типами регульованих асинхронних електроприводів з короткозамкнутими двигунами є:
· частотно – регульований електропривод, що дозволяє задовольнити найвищі вимоги по діапазону і якості регулювання швидкості і відробітку складних законів руху;
· система з реалізацією енергії ковзання – асихронно-вентильний каскад АВК;
· система регулятор тиристора напруги – асинхронний двигун ТРН-АД, призначена для масових електроприводів з керованими пускотормозными режимами, режимами короткочасного зниження швидкості.
Швидкість асинхронних двигунів практично пропорційна частоті напруги живлячої мережі. Таким чином, зміна швидкості обертання двигуна може бути досягнуте шляхом зміни частоти споживаної напруги. З іншого боку, момент двигуна пропорційний магнітному потоку в повітряному зазорі двигуна. Останній, у свою чергу, пропорційний живлячій напрузі і назад пропорційний частоті живлячої напруги. Таким чином, момент двигуна може бути змінений шляхом підстроювання живлячої напруги під будь-яку необхідну частоту.
Відповідно, використовуючи двигун змінного струму для отримання постійного моменту при швидкостях, що змінюються, необхідно мати джерело енергії з регульованою напругою і регульованою частотою, який підтримуватиме постійним відношення
U / f=const
де U - напруга живлячої мережі; f - частота.
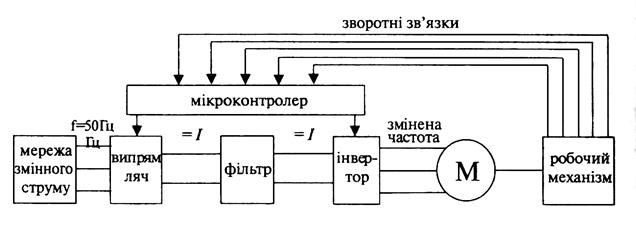
Найвідоміший спосіб отримання цього типу енергії - це перетворення змінного струму на промисловій частоті 50 Гц в постійний струм за допомогою випрямляча, а потім назад в змінний струм за допомогою інвертора. У цій схемі напруга регулюється випрямлячем, а частота інвертором.
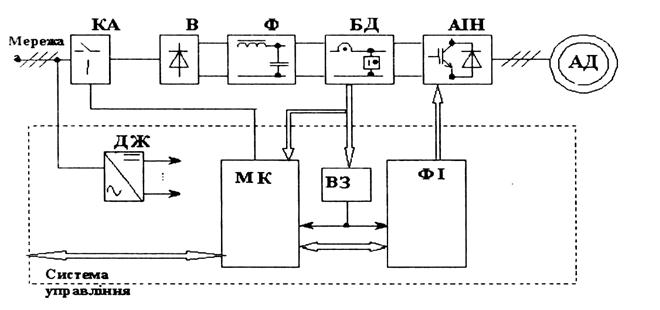
Основними елементами частотно-регульованого приводу є випрямляч, інвертор, асинхронний або синхронний двигун, програмований мікроконтролер. На додаток до перерахованого використовуються індуктивності і (або) ємкості для стабілізації виходу випрямляча і мінімізації рівня вищих гармонік.
Коли велика індуктивність сполучена послідовно з виходом випрямляча, він називається стабілізатором струму або «джерелом». Така система називається інвертор з джерелом струму (current-source inverter - CSI). Коли ж велика ємкість сполучена паралельно з виходом випрямляча - те це інвертор з джерелом напруги (VSI).
Узагальнена функціональна схема частотно-регульованого електропривода показана на малюнку 6.1.
Мал. 6.1
Системи частотно-регульованого електроприводу можуть бути класифіковані за типом двигуна і за типом перетворювача.
Частотно-регульований електропривод з асинхронним двигуном:
· з інвертором струму;
· з інвертором напруги.
Частотно-регульований електропривод з синхронним двигуном:
· з інвертором струму, часто званим інвертором з комутованим навантаженням (load-commutated inverter - LCI);
· з інвертором напруги.
На додаток використовується техніка, відома як широко-імпульсна модуляція ШІМ (PWM). У цій схемі застосовується некерований випрямляч, а змінний струм з регульованою частотою і регульованим рівнем напруги формується інвертором. ШІМ зменшує зміст гармонік на виході інвертора шляхом поліпшення форми кривою струму інвертора струму або форми напруги на виході інвертора напруги. ШИМ до недавнього часу використовувалася при малих потужностях, але зараз використовується і в могутніх частотно-регульованих електроприводах. Можна упевнено сказати, що ШІМ стає домінуючою технологією в частотно-регульованому електроприводі.
Для забезпечення швидкодії електроприводу в перехідних процесах розроблений метод просторового векторного управління, званий також управлінням з орієнтацією магнітного поля. Цей метод заснований на управлінні двома складовими поля статора, одна з яких забезпечує потік в повітряному зазорі двигуна, а інша – момент на його валу. В результаті стає можливим швидко змінювати значення моменту в широкому діапазоні швидкостей. Індукційний двигун при такому способі управління стає подібний до двигуна постійного струму з незалежним збудженням.
Керованими компонентами при реалізації методу є складові струму статора в системі координат, що обертаються. При цьому розрізняють пряме і непряме векторне управління. Існують багато модифікацій систем векторного управління. Зокрема, просторовий вектор обчислюється мікроконтролером з використанням моделі, що враховує параметри конкретного типу двигуна, наприклад, активних опорів ротора, статора, індуктивності розсіяння і ін. Одночасно враховується інформація, що поступає з датчика швидкості двигуна. На рис.6.2 приведена узагальнена схема векторного управління.
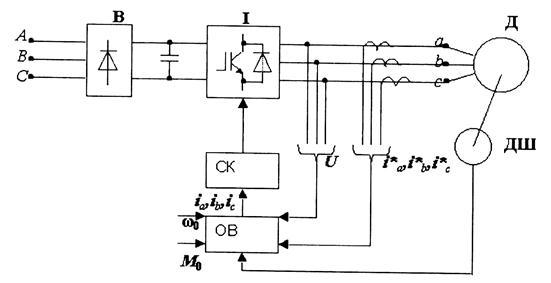
Рис.6.2 . Узагальнена схема векторного управління
СК – система керування інвертором; ОВ – обчислювач вектора управління; ДШ – датчик швидкості; Д – двигун; В – випрямляч; І – інвертор.
При будь-якому способі управління за допомогою значення і частоти живлячої напруги в системі електроприводу необхідно мати перетворювач частоти, який може бути виконаний на основі різних схем. До появи нового покоління приладів силової електроніки для цих цілей переважно використовувалися перетворювачі тиристорів частоти з безпосереднім зв'язком з мережею електроживлення (циклоконверторы) і рідше – перетворювачі з явно вираженою ланкою постійного струму із структурою випрямляч-інвертор.
При використанні звичайних тиристорів інвертор напруги виконується по схемі з примусовою комутацією. Перетворювачі тиристорів володіють рядом значних недоліків, які істотно знижують техніко-економічні показники електроприводу в цілому. До таких недоліків відносять, перш за все, украй низькі массогабаритные питомі показники і наявність вищих гармонік у вихідній напрузі, зниженню яких методами ШІМ важко частотними характеристиками тиристорів. Тому для ефективного управління асинхронним електроприводом малої і середньої потужності використовують інвертори напруги на IGBT – транзисторах з робочою частотою, лежачою за переділами звукового діапазону.
Масове виробництво перетворювачів для електроприводу на основі сучасних двохопераційних приладів освоєне практично всіма ведучими електротехнічними компаніями миру. При цьому різноманіттю існуючих перетворювачів властиве використання як силова схема однієї і тієї ж класичної структури (рис.6.3.): трифазний мостовий некерований (нерегульований) випрямляч В, LC – фільтр Ф ланки постійного струму, трифазний мостовий автономний інвертор напруги АІН з широтно-імпульсною модуляцією ШІМ.
 |