Сравнительная оценка особенности непрерывных и цифровых систем
Повышение точности в установленном режиме
Методы оценки качества регулирования
Оценка качества регулирования линейных систем
1.Методы оценки качества регулирования.
При исследовании САУ приходится решать задачу обеспечения требуемых показателей качества переходного процесса:
- быстродействия,
- колебательности,
- перерегулирования,
характеризующих точность и плавность протекания процесса.
Будем считать, что САУ описывается системой дифференциальных уравнений с постоянными коэффициентами.
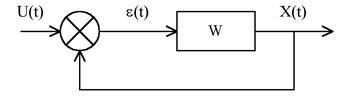
При изменении воздействия U(t) на входе выходную величину можно записать так:
x(t) = xсв(t) + xв(t),
где: x(t) – решение дифференциального уравнения, описывающего САУ,
xсв(t) – свободная составляющая переходного процесса (соответствующая общему решению однородного дифференциального уравнения),
xв(t) – вынужденная состовляющая переходного процесса, обусловленная законом изменения U(t) и определяющая точность САУ.
1. Оценка качества регулирования в установившемся режиме.
Установившаяся ошибка регулирования САУ eв(t) = U(t) – xв(t), которую можно представить в виде ряда:
 ,
,
где C0 … Cm - коэффициенты ошибок, при этом:
С0 = W(0) - коэфф. статической и позиционной ошибки;
 - коэффициент скоростной ошибки;
- коэффициент скоростной ошибки;

коэфф. ошибки от ускорения;
W - передаточная функция замкнутой САУ.
В статических системах С0 ¹ 0, в САУ с астатизмом 1-го порядка С0 = 0 , С1 ¹ 0, в САУ с астатизмом 2-го порядка С0 = C1 = 0, С2 ¹ 0. Увеличение числа интегрирующих звеньев повышает порядок астатизма, что ведет к уменьшению ошибки, но при этом усложняется обеспечение устойчивости системы.
2. Оценка качества переходного процесса при воздействии ступенчатой функции.
Пусть U(t) = 1(t) , тогда по кривой переходнойхарактеристикиможно получить прямые оценки качества переходного процесса:
1) время регулирования tр –минимальное время по истечении которого регулируемая величина будет оставаться близкой к устанавливаемомузначению с,заданной точностью D = | h(t) – hуст |,значение D нужно оговаривать в процентах oт hуст;
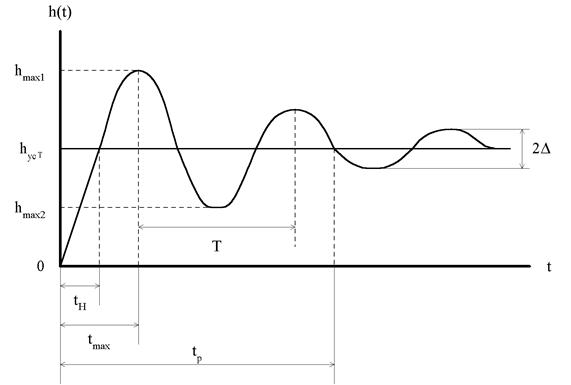
2) перерегулирование s - максимальное отклонение h(t) от hуст в относительных единицах или процентах от hуст;
3) Частота колебаний w=2p/T;
4) Число колебаний n, которое имеет переходная характеристика за время tр чаще всего n =1¸2 иногда 3¸4;
5) время достижения первого максимума tmax;
6) время нарастания переходного процесса tн;
7) декремент затухания:
 .
.
Переходные процессы делят на три группы:

- монотонные (a);
- апериодические (b);
- колебательные (c).
1. Оценка качества регулирования при гармонических воздействиях, ощуществляющихся по АЧХ.
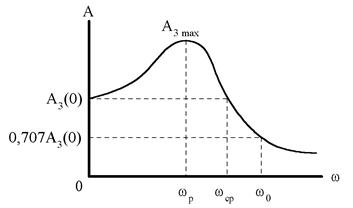
А3 - АЧХ замкнутой САУ.
Для оценки качества переходного процесса используются следующие характеристики.
1)  - показатель колебательности. Чем выше М, тем менее качественна САУ. Считается допустимым 1,1<M<1,5;
- показатель колебательности. Чем выше М, тем менее качественна САУ. Считается допустимым 1,1<M<1,5;
2) wр - резонансная частота СДУ;
3) полоса пропускания САУ - это интервал 0<w<w0;
4) частота среза wср - косвенно характеризует длительность переходного процесса.
 .
.
2.Повышение точности в установившемся режиме. Проблема обеспечения требуемых свойств линейных систем требует решения следующих задач:
- обеспечение устойчивости (стабилизация);
- повышение запаса устойчивости (демпфирование);
- повышение точности регулирования в установившемся режиме (уменьшение или устранение статической ошибки воспроизведения задающего воздействия, уменьшение или устранение влияния возмущающих воздействий);
- улучшение переходных процессов (увеличение быстродействия, максимальное уменьшение динамических ошибок воспроизведения, воздействия).
Если для анализа цифровых систем используется Z - преобразование или уравнение состояния в дискретной форме, то их реакции представляются только в моменты квантования. Поэтому к дискретным данным нужно подходить осторожно, т.к. они могут быть неточным представлением истинной реакции цифровой системы. Из рисунка, на котором изображен типичный выходной сигнал цифровой системы С(t), имеющий максимальное значение Сm и соответствующий ему дискретный сигнал C*(t) видно, что максимальное значение дискретного сигнала:
 .
.

Чем меньше T, тем меньше различие между  и Сm. Но если Т велик, то дискретное представление реакции может быть совершенно ошибочным. Отметим, что выбор Т обычно определяется не правильностью представления её реакции в моменты квантования, а что более важно, соображениями устойчивости, точности и качества системы в целом.
и Сm. Но если Т велик, то дискретное представление реакции может быть совершенно ошибочным. Отметим, что выбор Т обычно определяется не правильностью представления её реакции в моменты квантования, а что более важно, соображениями устойчивости, точности и качества системы в целом.
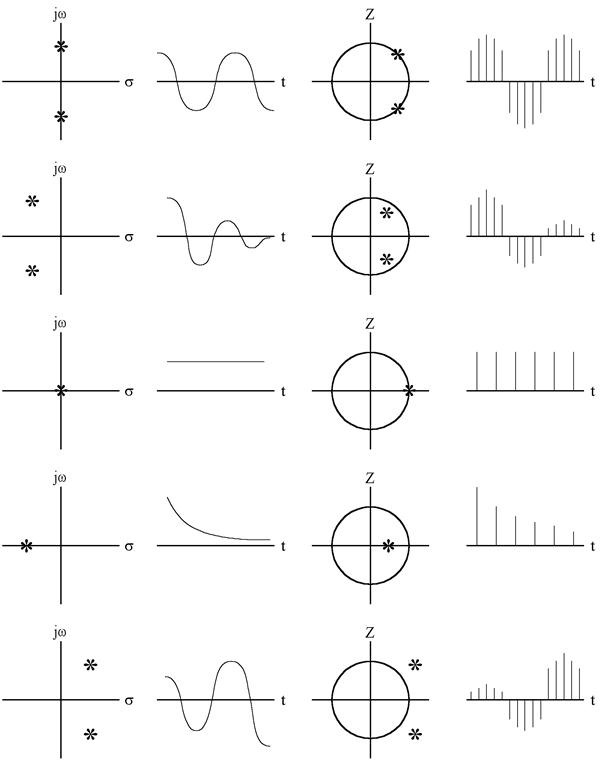
Для непрерывных систем известна связь между положением на S - плоскости корней характеристического уравнения и переходной функцией. Например, комплексно-сопряженные корни, расположенные в левой половине S - плоскости, обуславливают экспоненциально затухающие синусоидальные процессы, корни на отрицательной части действительной оси соответствуют монотонно затухающим процессам; простые сопряженные корни на мнимой оси приводят к возникновению незатухающих гармонических колебаний с постоянной амплитудой. Кратные корни на мнимой оси и корни в правой половине S - плоскости соответствуют расходящимся процессам.
3.Сравним характерные особенности непрерывных и цифровых систем, используя в качестве примера систему управления космическим кораблем. Структурная схема упрощенной системы управления по одной координате изображена на рисунке.
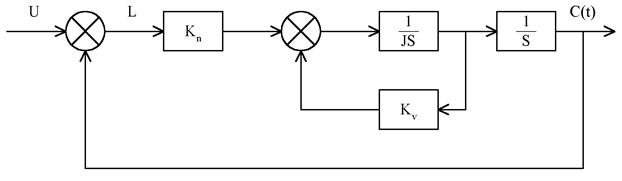
Kn, Kv –датчики положения и скорости.
Предполагается, что корабль имеет жесткую структуру. Поэтому его можно представить чистым моментом инерции J. По положению c(t) и его производной - скорости V(t) - с помощью соответствующих датчиков осуществляется обратная связь. Обратная связь по скорости часто используется для целей стабилизации.
Передаточная функция разомкнутой системы:
 .
.
Передаточная функция замкнутой системы:
 .
.
Для реального корабля:
Kn = 1,65 × 106, Kv = 3,17 × 105, J = 41822.
Тогда
 .
.
Характеристическое уравнение системы:
p2 + 8,871p + 39,453 = 0.
Корни уравнения положительны при любых положительных Kn, Kv, J, следовательно, непрерывная система будет асимптотически устойчива.
Структурная схема соответствующей цифровой системы отличается от предыдущей наличием квантователя нулевого порядка с периодом T.

Передаточная функция разомкнутой системы:
 ,
,
где Gn(p) - переходная функция экстраполятора, известно, что:
 .
.
Тогда:
 ,
,
 .
.
Тогда:
 .
.
Передаточная функция замкнутой системы:
 .
.
При Kn = 1,65 × 106, Kv = 3,17 × 105, J = 41822,
 ,
,
где A = 83644,
B = 1,65 × 106 × T2 + 6,34 × 105 × T – 167288,
C = 1,65 × 106 × T2 - 6,34 × 105 × T + 83644.
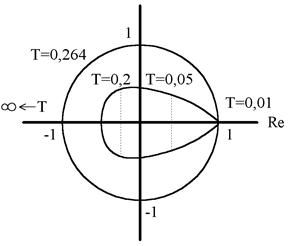
Качество цифровой системы зависит от параметров Kn, Kv, J и Т. Если применить критерий Джури к характеристическому уравнению системы Az2 + Bz + C = 0, то диапазон устойчивости по параметру Т будет равен:
0 £ Т < 264 с
Корневой годограф, т.е. диаграмма положения корней характериестического уравнения на плоскости Z при изменении Т от нуля до бесконечности, представлен на рисунке:
Переходные функции цифровой системы изображены на рисунке:

Из рассмотренного примера, по результатам анализа непрерывной и цифровой систем управления, можно сделать выводы:
1) При одних и тех же структуре и параметрах цифровая система менее устойчивая, чем непрерывная.
2) Качество цифровой системы зависит от периода квантования. Его возрастание обычно способствует увеличению выброса переходной функции и, в конечном счете, может привести к неустойчивости системы.
3) При малых значениях Т корни характеристического уравнения располагаются очень близко к точке Z = 1. Это создает практические сложности при анализе цифровых систем, т.к. некоторые параметры (кривые коэффициенты затухания, перерегулирования и. др.) определяются не точно.