Область применения цифровых регуляторов
Двухпозиционный регулятор
Пропорционально-инегрально-дифференциальный регулятор (ПИД - регулятор)
Пропорционально-интегральный регулятор (ПИ - регулятор)
Интегральный регулятор (И - регулятор)
Пропорциональный регулятор (П - регулятор)
Определение цифрового регулятора
Законы управления и параметры настроек цифровых регуляторов
1.Устройство (в том числе и программируемое), обеспечивающее сравнение регулируемой величины Х с заданным ее значением Х0 и воздействующее на регулируемый объект с целью уменьшения величины отклонения между измеренным значением и заданным значением, называется автоматическим регулятором. Общим для систем автоматического регулирования (САР) является наличие замкнутой структуры. Управление регулирующим органом (клапаном, заслонкой и т. п.) осуществляется по закону, определяющему тип регулятора. Закон регулирования характеризуется зависимостью между отклонением Х регулируемой величины Х от ее заданного значения Х0 (DХ=Х0-Х) и положением регулирующего органа U. Математическое выражение зависимости U=f(DХ) называют законом регулирования регулятора. По характеру выполнения вычислительных операций регуляторы делят на непрерывного (аналоговые и дискретного (цифровые) действия или просто аналоговые и цифровые регуляторы. Аналоговый регулятор – тот, у которого вычислительные действия осуществляются непрерывно во времени. ЦР – тот, у которого вычисления осуществляются в дискретные моменты времени nT, где n = 0,1,2….Эти регуляторы обеспечивают изменение регулирующего воздействия U, только в определенные моменты времени, между этими моментами регулирующее воздействие постоянно:
U(t) = U(nT), при nT < t < (n+1)T
Т – время цикла.
В системах ЦР имеет место не только дискретизация (т. е. квантование по времени), но и квантование по уровню, вызванное дискретностью входной и выходной координаты регуляторов.
Функцию ЦР могут выполнять импульсные фильтры, (пассивные четырехполюсники) или микро-ЭВМ. По сравнению с аналоговым регулятором, ЦР в состоянии обеспечить гораздо лучшее качество управления и, кроме того, ЦР более гибок, т.к. алгоритм управления, реализующий закон регулирования, легко может быть изменен сменой программы ЦР.
2.Пропорциональными регуляторами (П-регуляторами) называются такие ЦР, которые обеспечивают пропорциональность между изменением положения регулирующего органа и величиной отклонения. Если пренебречь зоной нечуствитедьности, свойственной реальным регулятором, собственными инерционностями отдельных узлов регулятора, временем отработки заданного значения регулирующего воздействия, то идеализированное уравнение П-регулятор без учета квантования по уровню имеет вид:
U(t) = U1 при k1Dx[nT] > U1,
U(t) = k1Dx[nT] при nT < t < (n+1)T, -U2 < k1Dx[nT] < U2,
U(t) = -U2 при k1Dx[nT] < -U2
где Dx[nT] - значение отклонения величины X в дискретные моменты времени Т ,2T, 3Т, …, nТ.
Параметрами настройки дискретного П-регулятора являются коэффициент k, и время цикла Т. Характеристика цифрового П-регулятора приведена на рисунке l (a).
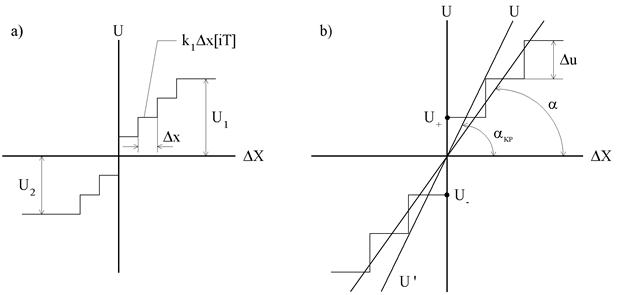
Рис. 1. Характеристики, определяющие работу П – регуляторов.
Квантование по уровню входной DХ и выходной U координат П-регулятора оценивается абсолютными и относительными значениями величин квантов этих координат:
 .
.
Квантование по уровню координат регулятора вызывает автоколебания в системе, в которой используется такой регулятор. Из рис.1 (b) видно, при определенных начальных условиях положение равновесия (Dx=0) соответствует двум значениям выходной координаты U+ и U- это приводит к возникновению автоколебаний. Амплитуда автоколебаний, которую можно представить в виде соответствующего числа квантов входной или выходной координат регулятора зависит от соотношения между данным и критическим значениями коэффициента усиления системы. Под критическим значением К1 подразумевается коэффициент усиления, соответствующий границе устойчивости системы. Исследования показали, что если значение коэффициента усиления в 2 раза меньше критического, то амплитуда автоколебаний меньше 0.5 кванта, если в 1,5 раза - то меньше одного кванта. Это утверждение до некоторой степени иллюстрируется рисунком 1 (b), где tga=k - среднее значение коэффициента усиления системы, в которой имеет место квантование по уровню, а tgaкр (прямаяUU’) - критическому значению коэффициента усиления для случая, когда tgaкр= 1,5tga. Из рис. 1 (b) видно, что приtgaкр>tgaпрямая с углом наклонаaкрбудет пересекать кривую, соответствующую характеристике регулятора, только в 3-х точках. Если относительные значения величин квантов выбрать достаточно малыми, например:

и обеспечить выполнение указанного выше условия выбора коэффициента усиления, то при больших возмущениях квантование по уровню практически не скажется на характере переходных процессов в системах с ЦР.
3.Интегральными регуляторами (И - регуляторами) называются регуляторы, которые обеспечивают пропорциональную зависимость между скоростью перестановки регулирующего органа и величиной отклонения:
 ,
,
где Tи - время, в течение которого изменение регулирующего воздействия достигает величины, соотествующей поданному скачкообразному отклонению Dx (рис.2 (а)).
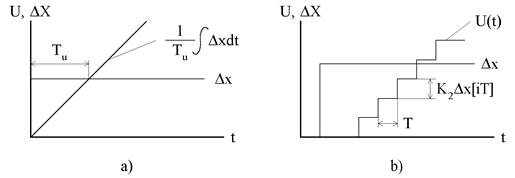
Рис. 2. Характеристики, определяющие работу И – регулятора.
По аналогии назовем цифровым И - регулятором - тот, в уравнении которого операция интегрирования заменена операцией суммирования величин отклонений, определяемых в моменты времени Т, 2Т, 3T, …, nТ. Без учета квантования по уровню уравнение идеализированного цифрового И-регулятора имеет вид:
 при nT<t<(n+1)T.
при nT<t<(n+1)T.
Кривые изменения регулирующего воздействия идеализированного цифрового И ‑ регулятора при скачкообразномизменении входного сигнала приведены на рис.2 (b). Цифровой И ‑ регулятор характеризуется двумя параметрами: коэффициентом К2 и временем цикла Т. Т ® 0 и при Ти = T/K2 поведение цифрового и аналогового И ‑ регуляторов совпадает. Квантование по уровню, свойственное цифровым И ‑ регуляторам, не будет сказываться, если величины квантов Dx и Du выбраны достаточно малыми и в системе значение (1,5¸2)K2 < Kкр.
4.Пропорционально - интегральным регулятором (ПИ - регулятором) называется тот, который обеспечивает пропорционально-интегральный закон регулирования. Скорость перестановки регулирующего органа в системах с ПИ-регуляторами пропорциональна величине отклонения и производной от отклонения. Идеализированное уравнение ПИ-регулятора имеет вид:
Параметрами настройки ПИ-регуляторов являются Кр и Ти - время интегрирования или время удвоения, т.к. обычно Ти определяют как время, в течение которого координата U достигает своего удвоенного значения, т.е. значение U = 2KрU(0) при скачкообразном изменении Dx(t) (рис. 3 (a)).
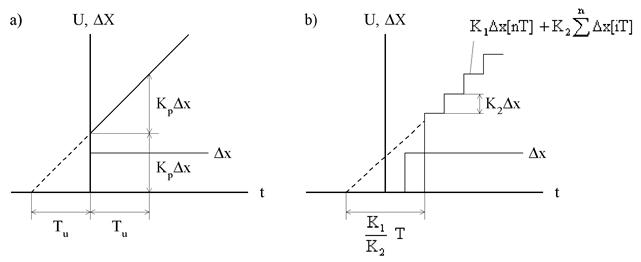
Рис. 3. Характеристики, определяющие работу ПИ – регулятора.
Идеализированное уравнение цифрового ПИ-регулятора имеет вид:

Кривая изменения выходной координаты идеализированного цифрового ПИ-регулятора при скачкообразном изменении входного сигнала (рис. 3 (b)). Этот регулятор можно охарактеризовать тремя параметрами: коэффициентами К1 и К2 и временем цикла Т. При Т ® 0 коэффициент K1 ® Kp, а выражение  , т.о.
, т.о.
 .
.
5.Пропорционально-интегрально-дифференциальными (ПИД-регуляторами) называются регуляторы, идеализированное уравнение которых имеет вид:

Аналоговый ПИД - регулятор имеет три параметра настройки Кр - коэффициент пропорциональности, Ти - время интегрирования или время удвоения, Tд - время дифференцирования или время предварения Параметры Кр и Tи у ПИД-регуляторов определяются как и у ПИ-регуляторов. Время Tд может быть определено из графика на рис.4 (а), когда Ти = ¥, а Dx меняется по линейному закону.
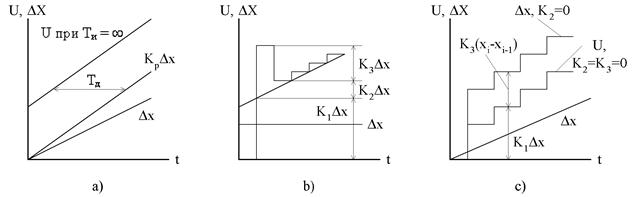
Рис. 4. Характеристики, определяющие работу ПИД-регулятора.
Уравнение идеализированного цифрового ПИД-регулятора имеет вид:
 ,
,
при nT < t < (n+1)T.
Кривые изменения выходной координаты цифрового ПИД-регулятора при скачкообразном и линейном законе изменения входной величины приведены на рис.4 (b) и 4 (c) соответственно. При Т®0 можно установить связь между параметрами аналогового и цифрового ПИД-регуляторов:
 .
.
6.Двухпозиционными регуляторами (РД-регуляторами) называются регуляторы, в системах с которыми регулируюкще воздействие на объект принимает только два значения. Идеализированное уравнение регулятора с учетом зоны возврата двухпозиционного релейного элемента 2e имеет вид:
U(t) = UMsign[Dx(t) - e],
U(t) = UMsign[Dx(t) + e].
Обычно зона 2e, гистерезисной петли не превышает 1% от диапазона изменения Dх (рис.5 (а)) и поэтому часто при анализе динамических свойств системы с РД - регуляторами этой зоной пренебрегают. В некоторых системах предусматривают регулировку величины максимального воздействия ±UM. В этом случае величина UM является параметром настройки РД - регулятора.
Идеализированное уравнение цифрового РД - регулятора имеет вид:
U(t) = UMsign[Dx(nT) - Dx],
U(t) = UMsign[Dx(nT) + Dx].
Характеристики цифрового РД - регулятора приведены на рис.5 (b).
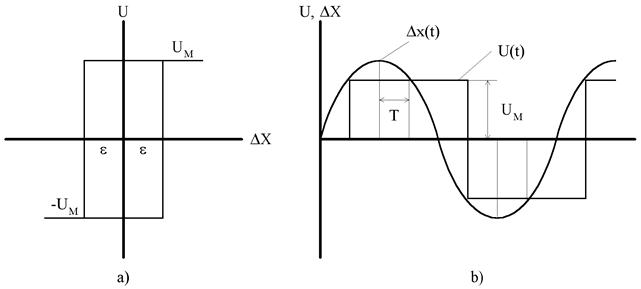
Рис. 5. Характеристики РД – регулятора.
По сравнению с аналоговым РД - регулятором цифровой РД – регулятор вносит дополнительное запаздывание, которое может достигать величины, равной Т, что видно из рис. 5 (b).
7.Решение некоторых задач автоматизации технологических процессов может быть решено более успешно цифровыми регуляторами, чем аналоговыми. К этим задачам относятся:
1) управление процессами, информация о состоянии которых может быть получена в дискретные моменты времени, например операции взвешивания, дозировки, применение данных химического анализа, использование датчиков, работающих в тяжелых условиях и др.;
2) управление медленно изменяющимися процессами, при которых необходимо обеспечить достаточно большую постоянную времени интегрирования и осуществить операцию дифференцирования медленно изменяющихся величин;
3) управление процессами, в которых для измерения регулируемой величины используются цифровые и частотные датчики, точность которых существенно превосходит точность аналоговых датчиков.
Аналоговые регуляторы для своей реализации требуют применения более сложных блоков памяти, чем цифровые регуляторы.
Приведем некоторые области применения ЦР.
Металлургия.
1. Регулирование скорости проката.
2. Регулирование размеров проката.
3. Регулирование диаметра труб.
Химическая промышленность.
1. Регулирование дозировок.
2. Регулирование продукта по хим. анализу.
Авиационная, автомобильная промышленность.
1. Регулирование скорости, нагрузки, момента при испытаниях двигателей.
2. Регулирование нагрузок при испытаниях на прчность конструкции.
Энергетика.
1. Регулирование частоты.
2. Регулирование скорости турбины.
Текстильная и бумажная промышленность.
- Регулирование скоростей привода.
Металлобрабатывающая промышленность.
- Програмное управление станками.