Обратная связь в магнитных усилителях и режим бесконтактного магнитного реле
Особенностью МУ является применение жесткой магнитной положительной обратной связи (ОС) по току с целью повышения коэффициента усиления по току и мощности. При магнитной ОС осуществляется суммирование напряженностей магнитных полей, создаваемых обмоткой ОС и управляющей обмоткой. Магнитная ОС в отличии от электрической ОС не влияет на входное и выходное сопротивление усилителя и не вызывает перехода МУ в режим самовозбуждения. Поэтому положительные ОС в МУ делают магнитными, а отрицательные – электрическими. Магнитная ОС может быть внешней и внутренней.
Внешняя последовательная положительная обратная связь в МУ изображена на рис. 7.8
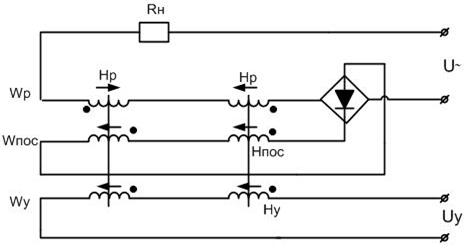
Рис. 7.8
Часть подмагничивающей МДС можно создать током I˜ср ,питающем нагрузку.
Обмотка положительной обратной связи (ПОС) обтекается I˜ср и чем больше I˜ , тем больше ПОС.



Основное соотношение для МУ можно записать так  .
.
Коэффициент Кпос устанавливает степень компенсации Нпос в том сердечнике, где данный полупериод напряженности постоянного и переменного полей вычитаются:
Нпос = Нр.ср Кпос = Нр.ср tgα.
Если IWy≠0, то общее подмагничивание МУ: IW=IпосWпос+IуWу.
На основании основного закона МУ: IуWу
Iр.срWр = IуWу +IпосWпос . (1), где Iпос = Iр.ср. Тогда Iр.ср(Wр-Wпос)=IуWу.

Рис. 7. 9
 (7.5)
(7.5)
 (7.6)
(7.6)
Подставляя (7.5) в (7.6), получим:
Построение характеристики вход-выход МУ с ПОС показано на рис.7.10.
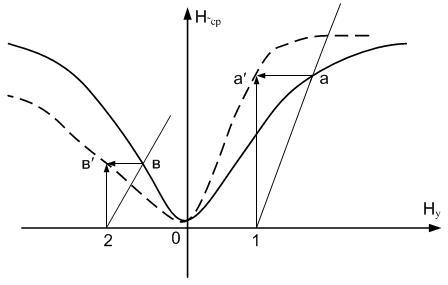
Рис .7.10
Из ряда точек по оси Ну проводят прямые, параллельные линии ПОС до пересечения в т. «а» и «в» с характеристикой вход-выход МУ без ПОС. Ординаты точек пресечения сносят на вертикали проведенные через точки 1,2 и т.д. Полученные точки «а′» и «в′» являются точками вход-выход МУ с ПОС. Это построение дает хорошее совпадение с экспериментом при Кпос ≤0,9.
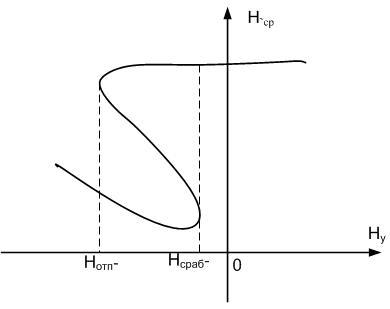
Рис. 7.11
В первом квадранте сигналы ОС и управления складываются – ПОС, во втором квадранте они вычитаются – ООС, т.е. чем больше глубина ОС, тем круче идет характеристика Нр.ср = f(Ну) в первом квадранте и положе во втором квадранте.
В случае, когда Wпос > Wр, т.е. Кпос>1, линия ПОС пройдет ниже характеристики Wпос = f(Ну) и перестроенная по указанному выше методике характеристика МУ с ПОС примет релейный (петлеобразный) вид, т.е. МУ входит в релейный режим и работает как бесконтактное магнитное реле (БМР), у которого значения токов Iу, соответствующих Нотп Нсраб , определяют ток отпускания Iотп и срабатывания Iсраб реле.
Из-за неидеальности диодов и неучтенных потоков рассеяния обмоток число витков Wпос делают больше расчетного Wпос = Кпос Wр , а затем шунтируют часть обмоток Wпос регулировочным R.
Для перехода в релейный режим необходимо, чтобы МУ с сердечниками из пермаллоя имел Кпос ≥1,02?1,05, для сердечников из обычных электротехнических сталей имел Кпос =1,05?1,1.
Как правило, применяют комбинированную ПОС (внешнюю + внутреннюю). Внутренняя ПОС создает Кпос =0,9?0,95, а недостающее до указанного выше значения Кпос обеспечивает внешняя ПОС. МУ с внутренней обратной связью.

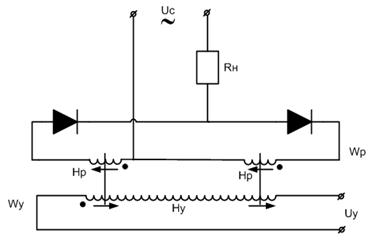
Рис.7.12.Магнитные усилители с внутренней ПОС:
а) с выходом постоянного тока;
б) с выходом переменного тока.
Рабочие обмотки включены параллельно, через них течет пульсирующий однополупериодный ток, постоянная составляющая которого обеспечивает самоподмагничивание МУ.
Нагрузка Rн может быть как с выходом переменного (рис.12б), так и постоянного тока (рис.12а).
Коэффициент ПОС в случае идеальных вентилей, сердечников и обмоток, чисто активной нагрузке равен 1. (Iср. выпр = Iр. ср).
Реверсивные МУ

Рис. 7.13
Реверсивные МУ имеют характеристику, показанную на рис. 7.13. Реверсивные МУ могут быть как с выходом постоянного, так и с выходом переменного тока.
В первом случае при изменении полярности входного сигнала изменяется на обратную полярность выходного постоянного тока (напряжения) на выходе, во втором – меняется на 180 эл. град. фаза выходного тока.
Реверсивные усилители (РМУ) собирают из 2-х нереверсивных (НМУ).
Достоинства:
1)при Iу =0Iн =0.Ккр = Iк / Iхх = ∞.
2)реверсивный МУ, являясь балансной схемой, имеет лучшую линейность и стабильность характеристик, чем НМУ.
3) КIрму примерно вдвое больше КI составляющих его НМУ.
Мостовая схема РМУ изображена на рис. 7.14, а статическая характеристика такого РМУ показана на рис.7.15. Часто нагрузкой РМУ является управляемый асинхронный двигатель.
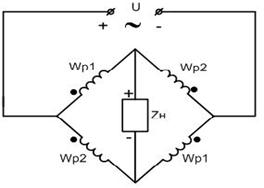
Рис. 7.14
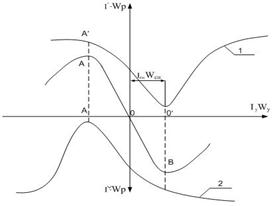
Рис. 7.15
Рабочие обмотки Wр нереверсивных МУ в мостовой схеме включены в противоположные плечи моста. При подаче сигнала Iy индуктивное сопротивление Хр одной пары рабочих обмоток возрастает, а другой – падает, в результате в нагрузке Zн возникает ток.
Достоинство мостового РМУ – отсутствие дифференциального трансформатора, что повышает также и КПД схемы.
Однако, мостовой РМУ следует применять, если Uн.макс ≈ (0,5– 0,8) Uсети.