Емкостные датчики с изменяемой диэлектрической проницаемостью
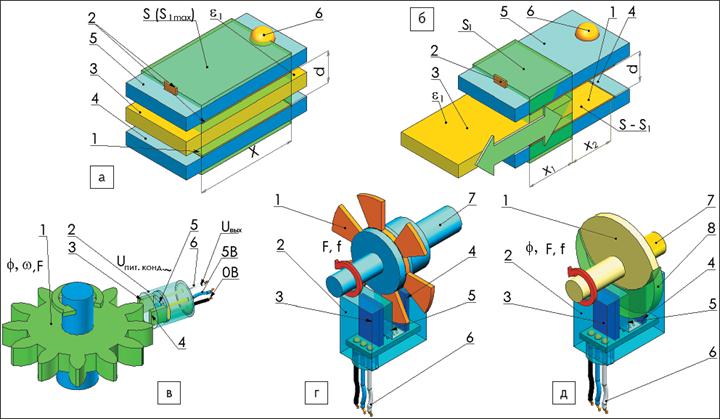
Иллюстрации конструкций емкостных датчиков, физические принципы которых основаны на изменении емкости при изменении диэлектрической проницаемости C(ε): а, б — линейный емкостной датчик расстояний x1 и x2: 1, 2 — нижняя и верхняя обкладки конденсатора, зафиксированные на постоянном расстоянии d, с максимальной площадью перекрытия S и полной длиной перекрытия X; 3 — слой диэлектрика с диэлектрической проницаемостью ε1; 4, 5 — зафиксированные печатные платы; 6 — пайка обкладки на плате; а — датчик в исходном состоянии при x1= X и x2= 0; б — датчик с x1 ≤ X и ненулевым x2; S1 — переменная площадь перекрытия обкладок диэлектриком 3 (с диэлектрической проницаемостью ε1) в пределах детектируемого расстояния x1; (S–S1) — переменная площадь перекрытия обкладок воздушным диэлектриком (с диэлектрической проницаемостью ε ≈ 1) в пределах переменного расстояния x2 = X–x1; в — емкостной датчик зубчатого ротора типа «открытый конденсатор»: φ, ω, F — абсолютный и частотные сигналы датчика: φ — сигнал абсолютного углового положения ротора; F, ω (или f) — частота ротора и следования детектируемых элементов, соответственно; 1 — ротор (из металла или диэлектрика); 2 — корпус датчика; 3, 4 — выступающие обкладки плоского конденсатора; 5 — схема питания конденсатора переменным напряжением и обработки сигнала; 6 — проводные терминалы датчика (в трехпроводной частотной схеме подключения, работающей на постоянном напряжении); г — угловой емкостной датчик-прерыватель: 1 — ротор-крыльчатка (из металла или диэлектрика); 2 — корпус датчика; 3, 4 — обкладки плоского конденсатора; 5 — схема питания и обработки сигнала; 6 — проводные терминалы датчика (в трехпроводной частотной схеме подключения, работающей на постоянном напряжении); 7 — вращающийся вал; F, f — частотные сигналы датчика; д — угловой емкостной датчик абсолютного положения — прерыватель: 1 — ротор с материалом, изменяющим емкостную связь (из металла или диэлектрика); 2 — корпус датчика; 3, 4 — обкладки плоского конденсатора; 5 — схема питания и обработки сигнала; 6 — проводные терминалы датчика (в трехпроводной аналоговой или частотной схеме подключения, работающей на постоянном напряжении); 7 — вращающийся вал; 8 — материал, изменяющий емкостную связь; φ, F, f — абсолютный и частотные сигналы датчика.