Предприятие, фирма, компания
ЛИТЕРАТУРА
Раздел 9 Принципы построения и защита от сбоев и несанкционированного доступа
Раздел 8 Файловая система
Задачи ОС по управлению файлами и устройствами.
Цели и задачи файловой системы. Типы файлов. Иерархическая структура файловой системы. Имена файлов. Виртуальные файловые системы.
Монтирование. Специальные файлы и аппаратные драйверы. Физическая организация файловой системы. Механизм контроля доступа к файлам. Избыточные дисковые подсистемы RAID. Подсистема ввода-вывода. Драйвера. Динамическая загрузка и выгрузка драйверов. Многослойная модель подсистемы ввода-вывода. Многоуровневые драйверы. Поддержка синхронных и асинхронных операций ввода-вывода. Менеджер ввода-вывода
8.1. Задачи ОС по управлению файлами
Подсистема ввода-вывода (Input-Output Subsystem, I/O) мультипрограммной ОС при обмене данными с внешними устройствами компьютера должна решать ряд общих задач, из которых наиболее важными являются следующие:
§ разделение устройств и данных между процессами;
§ обеспечение удобного логического интерфейса между устройствами и остальной частью системы;
§ поддержка широкого спектра драйверов с возможностью простого включения в систему нового драйвера;
§ динамическая загрузка и выгрузка драйверов;
§ поддержка нескольких файловых систем;
§ поддержка синхронных и асинхронных операций ввода-вывода.
Разделение устройств и данных между процессами. Обеспечение удобного логического интерфейса между устройствами и остальной частью системы.
Каждое устройство ввода-вывода вычислительной системы — диск, принтер, терминал и т. п. — снабжено специализированным блоком управления, называемым контроллером. Контроллер взаимодействует с драйвером — системным программным модулем, предназначенным для управления данным устройством. Контроллер периодически принимает от драйвера выводимую на устройство информацию, а также команды управления, которые говорят о том, что с этой информацией нужно сделать (например, вывести в виде текста в определенную область терминала или записать в определенный сектор диска). Под управлением контроллера устройство может некоторое время выполнять свои операции автономно, не требуя внимания со стороны центрального процессора. Это время зависит от многих факторов — объема выводимой информации, степени интеллектуальности управляющего устройством контроллера, быстродействия устройства и т. п. Даже самый примитивный контроллер, выполняющий простые функции, обычно тратит довольно много времени на самостоятельную реализацию подобной функции после получения очередной команды от процессора. Это же справедливо и для сложных контроллеров, так как скорость работы любого устройства ввода-вывода, даже самого скоростного, обычно существенно ниже скорости работы процессора.
Процессы, происходящие в контроллерах, протекают в периоды между выдачами команд независимо от ОС. От подсистемы ввода-вывода требуется спланировать в реальном масштабе времени (в котором работают внешние устройства) запуск и приостановку большого количества разнообразных драйверов, обеспечив приемлемое время реакции каждого драйвера на независимые события контроллера. С другой стороны, необходимо минимизировать загрузку процессора задачами ввода-вывода, оставив как можно больше процессорного времени на выполнение пользовательских потоков.
Данная задача является классической задачей планирования систем реального времени и обычно решается на основе многоуровневой приоритетной схемы обслуживания по прерываниям. Для обеспечения приемлемого уровня реакции все драйверы (или части драйверов) распределяются по нескольким приоритетным уровням в соответствии с требованиями ко времени реакции и временем использования процессора. Для реализации приоритетной схемы обычно задействуется общий диспетчер прерываний ОС.
Согласование скоростей обмена и кэширование данных
При обмене данными всегда возникает задача согласования скорости. Например, если один пользовательский процесс вырабатывает некоторые данные и передает их другому пользовательскому процессу через оперативную память, то в общем случае скорости генерации данных и их чтения не совпадают. Согласование скорости обычно достигается за счет буферизации данных в оперативной памяти и синхронизации доступа процессов к буферу.
В подсистеме ввода-вывода для согласования скоростей обмена также широко используется буферизация данных в оперативной памяти. В тех специализированных операционных системах, в которых обеспечение высокой скорости ввода-вывода является первоочередной задачей (управление в реальном времени, услуги сетевой файловой службы и т. п.), большая часть оперативной памяти отводится не под коды прикладных программ, а под буферизацию данных. Однако буферизация только на основе оперативной памяти в подсистеме ввода-вывода оказывается недостаточной — разница между скоростью обмена с оперативной памятью, куда процессы помещают данные для обработки, и скоростью работы внешнего устройства часто становится слишком значительной, чтобы в качестве временного буфера можно было бы использовать оперативную память — ее объема может просто не хватить. Для таких случаев необходимо предусмотреть особые меры, и часто в качестве буфера используется дисковый файл, называемый также спул-файлом (от spool — шпулька, тоже буфер, только для ниток). Типичный пример применения спулинга дает организация вывода данных на принтер. Для печатаемых документов объем в несколько десятков мегабайт — не редкость, поэтому для их временного хранения (а печать каждого документа занимает от нескольких минут до десятков минут) объема оперативной памяти явно недостаточно.
Другим решением этой проблемы является использование большой буферной памяти в контроллерах внешних устройств. Такой подход особенно полезен в тех случаях, когда помещение данных на диск слишком замедляет обмен (или когда данные выводятся на сам диск). Например, в контроллерах графических дисплеев применяется буферная память, соизмеримая по объему с оперативной, и это существенно ускоряет вывод графики на экран.
Буферизация данных позволяет не только согласовать скорости работы процессора и внешнего устройства, но и решить другую задачу — сократить количество реальных операций ввода-вывода за счет кэширования данных. Дисковый кэш является непременным атрибутом подсистем ввода-вывода практически всех ОС, значительно сокращая время доступа к хранимым данным.
Разделение устройств и данных между процессами
Устройства ввода-вывода могут предоставляться процессам как в монопольное, так и в совместное (разделяемое) использование. При этом ОС должна обеспечивать контроль доступа теми же способами, что и при доступе процессов к другим ресурсам вычислительной системы — путем проверки прав пользователя или группы пользователей, от имени которых действует процесс, на выполнение той или иной операции над устройством. Например, определенной группе пользователей последовательный порт разрешено захватывать в монопольное владение, а другим пользователям это запрещено.
ОС может контролировать доступ не только к устройству в целом, но -и к отдельным порциям данных, хранимых или отображаемых этим устройством. Диск является типичным примером устройства, для которого важно контролировать доступ не к устройству в целом, а к отдельным каталогам и файлам. При выводе информации на графический дисплей отдельные окна экрана также представляют собой ресурсы, к которым необходимо обеспечить тот или иной вид доступа для протекающих в системе процессов. При этом для каждой порции данных или части устройства могут быть заданы свои права доступа, не связанные прямо с правами доступа к устройству в целом. Так, в файловой системе обычно для каждого каталога и файла можно задать индивидуальные права доступа. Очевидно, что для организации совместного доступа к частям устройства или частям данных, хранящихся на нем, непременным условием является задание режима совместного использования устройства в целом.
Одно и то же устройство в разные периоды времени может использоваться как в разделяемом, так и в монопольном режимах. Тем не менее существуют устройства, для которых обычно характерен один из этих режимов, например последовательные порты и алфавитно-цифровые терминалы чаще используются в монопольном режиме, а диски — в режиме совместного доступа. Операционная система должна предоставлять эти устройства в обоих режимах, осуществляя отслеживание процедур захвата и освобождения монопольно используемых устройств, а в случае совместного использования оптимизируя последовательность операций ввода-вывода для различных процессов в целях повышения общей производительности, если это возможно. Например, при обмене данными нескольких процессов с диском можно так упорядочить последовательность операций, что непроизводительные затраты времени на перемещение головок существенно уменьшаются (при этом для отдельных процессов возможно некоторое замедление операции ввода-вывода).
При разделении устройства между процессами может возникнуть необходимость в разграничении порции данных двух процессов друг от друга. Обычно такая потребность возникает при совместном использовании так называемых последовательных устройств, данные в которых в отличие от устройств прямого доступа не адресуются. Типичным представителем такого рода устройства является принтер, который не выделяется в монопольное владение процессам, и в то же время каждый документ должен быть напечатан в виде последовательного набора страниц. Для подобных устройств организуется очередь заданий на вывод, при этом каждое задание представляет собой порцию данных, которую нельзя разрывать, например документ для печати. Для хранения очереди заданий используется спул-файл, который одновременно согласует скорости работы принтера и оперативной памяти и позволяет организовать разбиение данных на логические порции. Так как спул-файл находится на разделяемом устройстве прямого доступа, то процессы могут одновременно выполнять вывод на принтер, помещая данные в свой раздел спул-файла.
Обеспечение удобного логического интерфейса между устройствами и остальной частью системы
Разнообразие устройств ввода-вывода делают особенно актуальной функцию ОС по созданию экранирующего логического интерфейса между периферийными устройствами и приложениями. Практически все современные ОС поддерживают в качестве основы такого интерфейса файловую модель периферийных устройств, когда любое устройство выглядит для прикладного программиста последовательным набором байт, с которым можно работать с помощью унифицированных системных вызовов (например, read и write), задавая имя файла-устройства и смещение от начала последовательности байт. Для поддержания такого интерфейса подсистема ввода-вывода должна проделать немалую работу, учитывая разницу в организации операций обмена данными, например, с жестким диском и графическим терминалом.
Привлекательность модели файла-устройства состоит в ее простоте и унифицированности для устройств любого типа, однако во многих случаях для программирования операций ввода-вывода некоторого устройства она является слишком бедной. Поэтому данная модель часто используется только в качестве базиса, над которым подсистема ввода-вывода строит более содержательную модель устройств конкретного типа. Подсистема ввода-вывода предоставляет, как правило, специфический интерфейс для вывода графической информации на дисплей или принтер, для программирования операций сетевого обмена и т. п. При этом разработчик специфического интерфейса всегда может опираться на имеющийся базовый интерфейс.
Монтирование
В общем случае вычислительная система может иметь несколько дисковых устройств. Мощные же компьютеры, как правило, оснащены большим количеством дисковых накопителей, на которые устанавливаются пакеты дисков. Более того, даже одно физическое устройство с помощью средств операционной системы может быть представлено в виде нескольких логических устройств, в частности путем разбиения дискового пространства на разделы. Возникает вопрос, каким образом организовать хранение файлов в системе, имеющей несколько устройств внешней памяти?
Первое решение состоит в том, что на каждом из устройств размещается автономная файловая система, то есть файлы, находящиеся на этом устройстве, описываются деревом каталогов, никак не связанным с деревьями каталогов на других устройствах. В таком случае для однозначной идентификации файла пользователь наряду с составным символьным именем файла должен указывать идентификатор логического устройства. Примером такого автономного существования файловых систем является операционная система MS-DOS, в которой полное имя файла включает буквенный идентификатор логического диска.
Другим вариантом является такая организация хранения файлов, при которой пользователю предоставляется возможность объединять файловые системы, находящиеся на разных устройствах, в единую файловую систему, описываемую единым деревом каталогов. Такая операция называется монтированием. Среди всех имеющихся в системе логических дисковых устройств операционная система выделяет одно устройство, называемое системным. Пусть имеются две файловые системы, расположенные на разных логических дисках (рис. 8.4.1), причем один, из дисков является системным.
Файловая система, расположенная на системном диске, назначается корневой. Для связи иерархий файлов в корневой файловой системе выбирается некоторый существующий каталог, в данном примере — каталог man. После выполнения монтирования выбранный каталог man становится корневым каталогом второй файловой системы. Через этот каталог монтируемая файловая система подсоединяется как поддерево к общему дереву (рис. 8.4.2).
После монтирования общей файловой системы для пользователя нет логической разницы между корневой и смонтированной файловыми системами, в частности именование файлов производится так же, как если бы она с самого начала была единой.

Рис. 8.4.1 Две файловые системы до монтирования

Рис. 8.4.2. Общая файловая система после монтирования
Специальные файлы
Специальные файлы, называемые иногда виртуальными, не связаны со статичными наборами данных, хранящихся на дисках, а являются удобным унифицированным представлением устройств ввода-вывода.
Понятие специального файла появилось в операционной системе UNIX. Специальный файл всегда связан с некоторым устройством ввода-вывода и представляет его для остальной части операционной системы и прикладных процессов в виде неструктурированного набора байт. Со специальным файлом можно работать так же, как и с обычным, то есть открывать, считывать из него определенное количество байт или же записывать в него определенное количество байт, а после завершения операции закрывать. Для этого используются те же системные вызовы, что и для работы с обычными файлами: open, create, read, write и close. Таким образом, для того чтобы вывести на алфавитно-цифровой терминал, с которым связан специальный файл /dev/tty3, сообщение "Hello, friends!", достаточно открыть этот файл с помощью системного вызова open:
fd =open ("/de/tty3". 2)
Затем можно вывести сообщение с помощью системного вызова write:
write (fd, "Hello, friends!". 15)
Для устройств прямого доступа имеет смысл также указатель текущего положения в файле, которым можно управлять с помощью системного вызова lseek.
Очевидно, что представление устройства в виде файла и использование для управления устройством файловых системных вызовов во многих случаях не позволяет выполнять только достаточно простые операции.
Традиционно специальные файлы помещаются в каталог /dev, хотя ничто не мешает создать их в любом каталоге файловой системы. При появлении нового устройства и соответственно нового драйвера администратор системы может создать новую запись с помощью команды mknod.
Физическая организация файловой системы
Представление пользователя о файловой системе как об иерархически организованном множестве информационных объектов имеет мало общего с порядком хранения файлов на диске. Файл, имеющий образ цельного, непрерывающегося набора байт, на самом деле очень часто разбросан «кусочками» по всему диску, причем это разбиение никак не связано с логической структурой файла, например, его отдельная логическая запись может быть расположена в несмежных секторах диска. Логически объединенные файлы из одного каталога совсем не обязаны соседствовать на диске. Принципы размещения файлов, каталогов и системной информации на реальном устройстве описываются физической организацией файловой системы. Очевидно, что разные файловые системы имеют разную физическую организацию.
Диски, разделы, секторы, кластеры
Основным типом устройства, которое используется в современных вычислительных системах для хранения файлов, являются дисковые накопители. Эти устройства предназначены для считывания и записи данных на жесткие и гибкие магнитные диски. Жесткий диск состоит из одной или нескольких стеклянных или металлических пластин, каждая из которых покрыта с одной или двух сторон магнитным материалом. Таким образом, диск в общем случае состоит из пакета пластин (рис. 9.4.3).
На каждой стороне каждой пластины размечены тонкие концентрические кольца — дорожки (traks), на которых хранятся данные. Количество дорожек зависит от типа диска. Нумерация дорожек начинается с 0 от внешнего края к центру диска. Когда диск вращается, элемент, называемый головкой, считывает двоичные данные с магнитной дорожки или записывает их на магнитную дорожку.

Рис. 8.4.3.Схема устройства жесткого диска
Головка может позиционироваться над заданной дорожкой. Головки перемещаются над поверхностью диска дискретными шагами, каждый шаг соответствует сдвигу на одну дорожку. Запись на диск осуществляется благодаря способности головки изменять магнитные свойства дорожки. В некоторых дисках вдоль каждой поверхности перемещается одна головка, а в других — имеется по головке на каждую дорожку. В первом случае для поиска информации головка должна перемещаться по радиусу диска. Обычно все головки закреплены на едином перемещающем механизме и двигаются синхронно. Поэтому, когда головка фиксируется на заданной дорожке одной поверхности, все остальные головки останавливаются над дорожками с такими же номерами. В тех же случаях, когда на каждой дорожке имеется отдельная головка, никакого перемещения головок с одной дорожки на другую не требуется, за счет этого экономится время, затрачиваемое на поиск данных.
Совокупность дорожек одного радиуса на всех поверхностях всех пластин пакета называется цилиндром {cylinder). Каждая дорожка разбивается на фрагменты, называемые секторами (sectors), или блоками (blocks), так что все дорожки имеют равное число секторов, в которые можно максимально записать одно и то же число байт. Сектор имеет фиксированный для конкретной системы размер, выражающийся степенью двойки. Чаще всего размер сектора составляет 512 байт. Учитывая, что дорожки разного радиуса имеют одинаковое число секторов, плотность записи становится тем выше, чем ближе дорожка к центру.
Сектор — наименьшая адресуемая единица обмена данными дискового устройства с оперативной памятью. Для того чтобы контроллер мог найти на диске нужный сектор, необходимо задать ему все составляющие адреса сектора: номер цилиндра, номер поверхности и номер сектора. Так как прикладной программе в общем случае нужен не сектор, а некоторое количество байт, не обязательно кратное размеру сектора, то типичный запрос включает чтение нескольких секторов, содержащих требуемую информацию, и одного или двух секторов, содержащих наряду с требуемыми избыточные данные (рис. 8.4.4).

Рис. 8.4.4. Считывание избыточных данных при обмене с диском
Операционная система при работе с диском использует, как правило, собственную единицу дискового пространства, называемую кластером (cluster)1. При создании файла место на диске ему выделяется кластерами. Например, если файл имеет размер 2560 байт, а размер кластера в файловой системе определен в 1024 байта, то файлу будет выделено на диске 3 кластера.
Дорожки и секторы создаются в результате выполнения процедуры физического, или низкоуровневого, форматирования диска, предшествующей использованию диска. Для определения границ блоков на диск записывается идентификационная информация. Низкоуровневый формат диска не зависит от типа операционной системы, которая этот диск будет использовать.
Разметку диска под конкретный тип файловой системы выполняют процедуры высокоуровневого, или логического, форматирования. При высокоуровневом форматировании определяется размер кластера и на диск записывается информация, необходимая для работы файловой системы, в том числе информация о доступном и неиспользуемом пространстве, о границах областей, отведенных под файлы и каталоги, информация о поврежденных областях. Кроме того, на диск записывается загрузчик операционной системы — небольшая программа, которая начинает процесс инициализации операционной системы после включения питания или рестарта компьютера.
Прежде чем форматировать диск под определенную файловую систему, он может быть разбит на разделы. Раздел — это непрерывная часть физического диска, которую операционная система представляет пользователю как логическое устройство (используются также названия логический диск и логический раздел)1. Логическое устройство функционирует так, как если бы это был отдельный физический диск. Именно с логическими устройствами работает пользователь, обращаясь к ним по символьным именам, используя, например, обозначения А, В, С, SYS и т. п. Операционные системы разного типа используют единое для всех них представление о разделах, но создают на его основе логические устройства, специфические для каждого типа ОС. Так же как файловая система, с которой работает одна ОС, в общем случае не может интерпретироваться ОС другого типа, логические устройства не могут быть использованы операционными системами разного типа. На каждом логическом устройстве может создаваться только одна файловая система.
В частном случае, когда все дисковое пространство охватывается одним разделом, логическое устройство представляет физическое устройство в целом. Если диск разбит на несколько разделов, то для каждого из этих разделов может быть создано отдельное логическое устройство. Логическое устройство может быть создано и на базе нескольких разделов, причем эти разделы не обязательно должны принадлежать одному физическому устройству. Объединение нескольких разделов в единое логическое устройство может выполняться разными способами и преследовать разные цели, основные из которых: увеличение общего объема логического раздела, повышение производительности и отказоустойчивости. Примерами организации совместной работы нескольких дисковых разделов являются так называемые RAID-массивы, подробнее о которых будет сказано далее.
На разных логических устройствах одного и того же физического диска могут располагаться файловые системы разного типа. На рис. 8.4.5 показан пример диска, разбитого на три раздела, в которых установлены две файловых системы NTFS (разделы С и Е) и одна файловая система FAT (раздел D).
Все разделы одного диска имеют одинаковый размер блока, определенный для данного диска в результате низкоуровневого форматирования. Однако в результате высокоуровневого форматирования в разных разделах одного и того же диска, представленных разными логическими устройствами, могут быть установлены файловые системы, в которых определены кластеры отличающихся размеров.
Операционная система может поддерживать разные статусы разделов, особым образом отмечая разделы, которые могут быть использованы для загрузки модулей операционной системы, и разделы, в которых можно устанавливать только приложения и хранить файлы данных. Один из разделов диска помечается как загружаемый (или активный). Именно из этого раздела считывается загрузчик ОС.

Рис. 8.4.5.Разбиение диска на разделы
Механизм контроля доступа
Каждый пользователь и каждая группа пользователей обычно имеют символьное имя, а также уникальный числовой идентификатор. При выполнении процедуры логического входа в систему пользователь сообщает свое символьное имя и пароль, а операционная система определяет соответствующие числовые идентификаторы пользователя и групп, в которые он входит. Вся идентификационные данные, в том числе имена и идентификаторы пользователей и групп, пароли пользователей, а также сведения о вхождении пользователя в группы хранятся в специальном файле (файл /etc/passwd в UNIX) или специальной базе данных (в Windows NT).
Вход пользователя в систему порождает процесс-оболочку, который поддерживает диалог с пользователем и запускает для него другие процессы. Процесс-оболочка получает от пользователя символьное имя и пароль и находит по ним числовые идентификаторы пользователя и его групп. Эти идентификаторы связываются с каждым процессом, запущенным оболочкой для данного пользователя. Говорят, что процесс выступает от имени данного пользователя и данных групп пользователей. В наиболее типичном случае любой порождаемый процесс наследует идентификаторы пользователя и групп от процесса родителя.
Определить права доступа к ресурсу — значит определить для каждого пользователя набор операций, которые ему разрешено применять к данному ресурсу. В разных операционных системах для одних и тех же типов ресурсов может быть определен свой список дифференцируемых операций доступа. Для файловых объектов этот список может включать следующие операции:
§ создание файла;
§ уничтожение файла;
§ открытие файла;
§ закрытие файла;
§ чтение файла;
§ запись в файл;
§ дополнение файла;
§ поиск в файле;
§ получение атрибутов файла;
§ установка новых значений атрибутов;
§ переименование;
§ выполнение файла;
§ чтение каталога;
§ смена владельца;
§ изменение прав доступа.
Набор файловых операций ОС может состоять из большого количества элементарных операций, а может включать всего несколько укрупненных операций. Приведенный выше список является примером первого подхода, который позволяет весьма тонко управлять правами доступа пользователей, но создает значительную нагрузку на администратора. Пример укрупненного подхода демонстрируют операционные системы семейства UNIX, в которых существуют всего три операции с файлами и каталогами: читать (read, г), писать (write, w) и выполнить (execute, x). Хотя в UNIX для операций используется всего три названия, в действительности им соответствует гораздо больше операций. Например, содержание операции выполнить зависит от того, к какому объекту она применяется. Если операция выполнить файл интуитивно понятна, то операция выполнить каталог интерпретируется как поиск в каталоге определенной записи. Поэтому администратор UNIX, по сути, располагает большим списком операций, чем это кажется на первый взгляд.
В ОС Windows NT разработчики применили гибкий подход — они реализовали возможность работы с операциями над файлами на двух уровнях: по умолчанию администратор работает на укрупненном уровне (уровень стандартных операций), а при желании может перейти на элементарный уровень (уровень индивидуальных операций).
В самом общем случае права доступа могут быть описаны матрицей прав доступа, в которой столбцы соответствуют всем файлам системы, строки — всем пользователям, а на пересечении строк и столбцов указываются разрешенные операции.Практически во всех операционных системах матрица прав доступа хранится «по частям», то есть для каждого файла или каталога создается так называемый список управления доступом (Access Control List, ACL), в котором описываются права на выполнение операций пользователей и групп пользователей по отношению к этому файлу или каталогу. Список управления доступа является частью характеристик файла или каталога и хранится на диске в соответствующей области, например в индексном дескрипторе inode файловой системы ufs. He все файловые системы поддерживают списки управления доступом, например, его не поддерживает файловая система FAT, так как она разрабатывалась для однопользовательской однопрограммной операционной системы MS-DOS, для которой задача защиты от несанкционированного доступа не актуальна.
Избыточные дисковые подсистемы RAID
В основе средств обеспечения отказоустойчивости дисковой памяти лежит общий для всех отказоустойчивых систем принцип избыточности, и дисковые подсистемы RAID (Redundant Array of Inexpensive Disks, дословно — «избыточный массив недорогих дисков») являются примером реализации этого принципа. Идея технологии RAID-массивов состоит в том, что для хранения данных используется несколько дисков, даже в тех случаях, когда для таких данных хватило бы места на одном диске. Организация совместной работы нескольких централизованно управляемых дисков позволяет придать их совокупности новые свойства, отсутствовавшие у каждого диска в отдельности.
RAID-массив может быть создан на базе нескольких обычных дисковых устройств, управляемых обычными контроллерами, в этом случае для организации управления всей совокупностью дисков в операционной системе должен быть установлен специальный драйвер. В Windows NT, например, таким драйвером является FtDisk — драйвер отказоустойчивой дисковой подсистемы. Существуют также различные модели дисковых систем, в которых технология RAID реализуется полностью аппаратными средствами, в этом случае массив дисков управляется общим специальным контроллером.
Дисковый массив RAID представляется для пользователей и прикладных программ единым логическим диском. Такое логическое устройство может обладать различными качествами в зависимости от стратегии, заложенной в алгоритмы работы средств централизованного управления и размещения информации на всей совокупности дисков. Это логическое устройство может, например, обладать повышенной отказоустойчивостью или иметь производительность, значительно большую, чем у отдельно взятого диска, либо обладать обоими этими свойствами. Различают несколько вариантов RAID-массивов, называемых также уровнями: RAID-0, RAID-1, RAID-2, RAID-3, RAID-4, RAID-5 и некоторые другие.
При оценке эффективности RAID-массивов чаще всего используются следующие критерии:
§ степень избыточности хранимой информации (или тесно связанная с этим критерием стоимость хранения единицы информации);
§ производительность операций чтения и записи;
§ степень отказоустойчивости.
В логическом устройстве RAID-0 (рис. 8.4.6) общий для дискового массива контроллер при выполнении операции записи расщепляет данные на блоки и передает их параллельно на все диски, при этом первый блок данных записывается на первый диск, второй — на второй и т. д. Различные варианты реализации технологии RAID-0 могут отличаться размерами блоков данных, например в наборах с чередованием, представляющих собой программную реализацию RAID-0 в Windows NT, на диски поочередно записываются полосы данных (strips) по 64 Кбайт. При чтении контроллер мультиплексирует блоки данных, поступающие со всех дисков, и передает их источнику запроса.
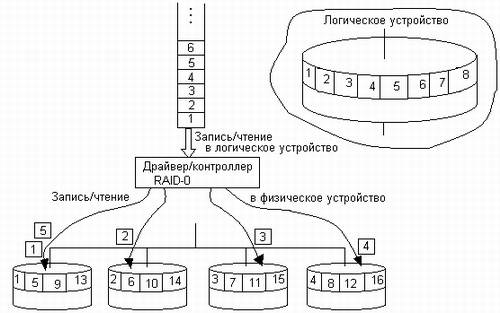
Рис. 8.4.6Организация массива RAID-0
По сравнению с одиночным диском, в котором данные записываются и считываются с диска последовательно, производительность дисковой конфигурации RAID-0 значительно выше за счет одновременности операций записи/чтения по всем дискам массива.
Уровень RAID-0 не обладает избыточностью данных, а значит, не имеет возможности повысить отказоустойчивость. Если при считывании произойдет сбой, то данные будут безвозвратно испорчены. Более того, отказоустойчивость даже снижается, поскольку если один из дисков выйдет из строя, то восстанавливать придется все диски массива. Имеется еще один недостаток — если при работе с RAID-0 объем памяти логического устройства потребуется изменить, то сделать это путем простого добавления еще одного диска к уже имеющимся в RAID-массиве дискам невозможно без полного перераспределения информации по всему изменившемуся набору дисков.
Уровень RAID-1 (рис. 8.4.7) реализует подход, называемый зеркальным копированием (mirroring). Логическое устройство в этом случае образуется на основе одной или нескольких пар дисков, в которых один диск является основным, а другой диск (зеркальный) дублирует информацию, находящуюся на основном диске. Если основной диск выходит из строя, зеркальный продолжает сохранять данные, тем самым обеспечивается повышенная отказоустойчивость логического устройства. За это приходится платить избыточностью — все данные хранятся на логическом устройстве RAID-1 в двух экземплярах, в результате дисковое пространство используется лишь на 50 %.

Рис. 8.4.7.Организация массива RAID-1
При внесении изменений в данные, расположенные на логическом устройстве RAID-1, контроллер (или драйвер) массива дисков одинаковым образом модифицирует и основной, и зеркальный диски, при этом дублирование операций абсолютно прозрачно для пользователя и приложений. Удвоение количества операций записи снижает, хотя и не очень значительно, производительность дисковой подсистемы, поэтому во многих случаях наряду с дублированием дисков дублируются и их контроллеры. Такое дублирование (duplexing) помимо повышения скорости операций записи обеспечивает большую надежность системы — данные на зеркальном диске останутся доступными не только при сбое диска, но и в случае сбоя дискового контроллера.
Некоторые современные контроллеры (например, SCSI-контроллеры) обладают способностью ускорять выполнение операций чтения с дисков, связанных в зеркальный набор. При высокой интенсивности ввода-вывода контроллер распределяет нагрузку между двумя дисками так, что две операции чтения могут быть выполнены одновременно. В результате распараллеливания работы по считыванию данных между двумя дисками время выполнения операции чтения может быть снижено в два раза! Таким образом, некоторое снижение производительности, возникающее при выполнении операций записи, с лихвой компенсируется повышением скорости выполнения операций чтения.
В уровне RAID-5 (рис. 8.4.8) используется метод, аналогичный RAID-4, но данные о контроле четности распределяются по всем дискам массива. При выполнении операции записи требуется в три раза больше оперативной памяти. Каждая команда записи инициирует ту же последовательность «считывание—модификация—запись» в нескольких дисках, как и в методе RAID-4. Наибольший выигрыш в производительности достигается при операциях чтения. Поскольку информация о четности может быть считана и записана на несколько дисков одновременно, скорость записи по сравнению с уровнем RAID-4 увеличивается, однако она все еще гораздо ниже скорости отдельного диска метода RAID-1 или RAID-3.

Рис. 8.4.8. Организация массива RAID-5
Кроме рассмотренных выше имеются еще и другие варианты организации совместной работы избыточного набора дисков, среди них можно особо отметить технологию RAID-10, которая представляет собой комбинированный способ, при котором данные «расщепляются» (RAID-0) и зеркально копируются (RAID-1) без вычисления контрольных сумм. Обычно две пары «зеркальных» массивов объединяются и образуют один массив RAID-0. Этот способ целесообразно применять при работе с большими файлами.
8.5 Подсистема ввода-вывода. Драйвера. Динамическая загрузка и выгрузка драйверов. Многослойная модель подсистемы ввода-вывода. Многоуровневые драйверы. Поддержка синхронных и асинхронных операций ввода-вывода. Менеджер ввода-вывода.
Многослойная модель подсистемы ввода- вывода
Многослойное построение программного обеспечения, характерное для операционных систем вообще, оказывается особенно естественным и полезным при построении подсистемы ввода-вывода. При большом разнообразии устройств ввода-вывода, обладающих существенно различными характеристиками (принтер и диски, графический монитор и сетевой адаптер и т. п.), иерархическая структура программного обеспечения позволяет соблюсти баланс между двумя весьма противоречивыми требованиями: с одной стороны, необходимо учесть все особенности каждого устройства, а с другой стороны, обеспечить единое логическое представление и унифицированный интерфейс для устройств всех типов. При этом нижние слои подсистемы ввода-вывода должны включать индивидуальные драйверы, написанные для конкретных физических устройств, а верхние слои должны обобщать процедуры управления этими устройствами, предоставляя общий интерфейс если не для всех устройств, то по крайней мере для групп устройств, обладающих некоторыми общими характеристиками, например для принтеров определенного производителя или для всех матричных принтеров и т. п.
Многослойность структуры, безусловно, облегчает решение большинства перечисленных в предыдущем разделе задач подсистемы ввода-вывода, таких как простота включения новых драйверов, поддержка нескольких файловых систем, динамическая загрузка-выгрузка драйверов и других.
Обобщенная структура подсистемы ввода-вывода представлена на рис. 8.5.1.
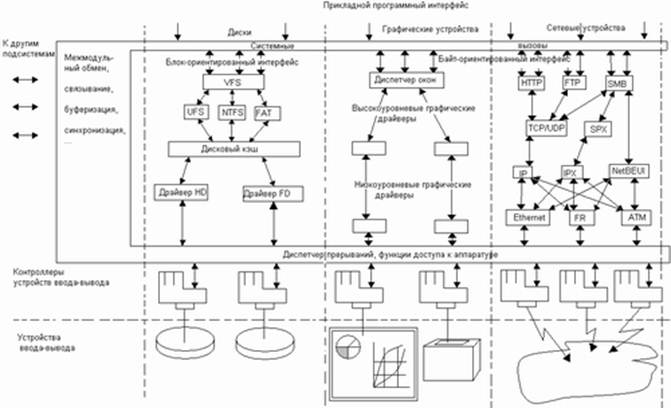
Рис. 8.5.1.Структура подсистемы ввода-вывода
Из рисунка видно, что программное обеспечение ввода-вывода делится не только на горизонтальные слои, но и на вертикальные. Это объясняется тем, что для такого разнообразного мира, как внешние устройства, трудно обеспечить единообразие в разбиении функций управления на слои. Поэтому общий принцип многослойности остается справедливым, однако для устройств определенного типа он реализуется по-разному, со своим количеством слоев и их функциями. В представленной структуре в качестве примера приведены три вертикальные подсистемы, управляющие дисками, графическими устройствами, такими как мониторы, принтеры и плоттеры, и сетевыми адаптерами. Естественно, к этому перечню можно добавить и другие, например подсистему управления символьными терминалами или какими-либо специализированными устройствами, такими как аналого-цифровые и цифро-аналоговые преобразователи.
В каждой вертикальной подсистеме существует несколько слоев модулей. Нижний слой образуют так называемые аппаратные драйверы устройств, название которых отражает тот факт, что они управляют аппаратурой внешних устройств, осуществляя обмен байтами и блоками байтов, и не имеют, как правило, дела с более высокоуровневыми вопросами логической организации данных, например с файлами или сложными графическими объектами. Функции вышележащих слоев в значительной степени зависят от типа вертикальной подсистемы.
Менеджер ввода-вывода
В подсистеме ввода-вывода наряду с модулями, отражающими специфику внешних устройств и образующими вертикальные подсистемы, существуют модули универсального назначения. Эти модули организуют согласованную работу всех остальных компонентов подсистемы ввода-вывода и взаимодействие с пользовательскими процессами и другими подсистемами ОС. Так же как и функции управления устройствами, эти организующие функции распределены по всем уровням, образуя оболочку. Эта оболочка иногда называется менеджером ввода-вывода. Задачи такого менеджера довольно разнообразны.
Верхний слой менеджера составляют системные вызовы ввода-вывода, которые принимают от пользовательских процессов запросы на ввод-вывод и переадресуют их отвечающим за определенный класс устройств модулям и драйверам, а также возвращают процессам результаты операций ввода-вывода. Таким образом этот слой поддерживает пользовательский интерфейс ввода-вывода, создавая для прикладных программистов максимум удобств по манипулированию внешними устройствами и расположенными на них данными.
Нижний слой менеджера реализует непосредственное взаимодействие с контроллерами внешних устройств, экранируя драйверы от особенностей аппаратной платформы компьютера — шины ввода-вывода, системы прерываний и т. п. Этот слой принимает от драйверов запросы на обмен данными с регистрами контроллеров в некоторой обобщенной форме с использованием независимых от шины ввода-вывода адресации и формата, а затем преобразует эти запросы в зависящий от аппаратной платформы формат. Диспетчер прерываний, рассмотренный выше, может входить в состав менеджера ввода-вывода или же представлять собой отдельный модуль ядра. В последнем случае менеджер ввода-вывода выполняет для диспетчера прерываний первичную обработку запросов прерываний, передавая диспетчеру обобщенные сведения об источнике запроса.
Важной функцией менеджера ввода-вывода является создание некоторой среды для остальных компонентов подсистемы, которая бы облегчала их взаимодействие друг с другом. Эта задача может быть решена за счет создания некоторого стандартного внутреннего интерфейса взаимодействия модулей ввода-вывода между собой, который бы дополнял внешние интерфейсы подсистемы с прикладными процессами, другими модулями ядра и аппаратурой. Наличие такого интерфейса существенно облегчает включение новых драйверов и файловых систем в состав ОС. Кроме того, разработчики драйверов и других программных компонентов освобождаются от написания общих процедур, таких как буферизация данных и синхронизация нескольких модулей между собой при обмене данными. Все эти функции берет на себя менеджер ввода-вывода.
Еще одной функцией менеджера ввода-вывода является организация взаимодействия модулей ввода-вывода с модулями других подсистем ОС, таких как подсистема управления процессами, виртуальной памятью и другими.
Примерами подобного менеджера являются менеджер ввода-вывода ОС Windows NT, а также среда STREAMS, существующая во многих версиях операционной системы UNIX. Менеджер ввода-вывода Windows NT организует взаимодействие между модулями с помощью пакетов запросов ввода-вывода — IRP (I/O Request Packet). Получив запрос от процедуры системного вызова, менеджер формирует IRP и передает его нужному драйверу. Драйвер после выполнения запрошенной операции возвращает ответ в виде другого IRP менеджеру, а тот, в свою очередь, может при необходимости передать этот IRP другому драйверу. Менеджер позволяет драйверам задавать взаимосвязи (bindings) между собой, и на основании информации о взаимосвязях и происходит передача пакетов IRP. Кроме того, менеджер Windows NT поддерживает динамическую загрузку-выгрузку драйверов без останова системы.
Наличие стандартного внутреннего межмодульного интерфейса повышает устойчивость и улучшает расширяемость подсистемы ввода-вывода, хотя может несколько замедлить ее работу, так как любое разделение на слои и части приводит к дополнительным операциям при взаимодействии по сравнению с монолитной организацией с прямыми передачами управления.
Многоуровневые драйверы
Первоначально термин «драйвер» применялся в достаточно узком смысле: под драйвером понимался программный модуль, который:
§ входит в состав ядра ОС, работая в привилегированном режиме;
§ непосредственно управляет внешним устройством, взаимодействуя с его контроллером с помощью команд ввода-вывода компьютера;
§ обрабатывает прерывания от контроллера устройства;
§ предоставляет прикладному программисту удобный логический интерфейс работы с устройством, экранируя от него низкоуровневые детали управления устройством и организации его данных;
§ взаимодействует с другими модулями ядра ОС с помощью строго оговоренного интерфейса, описывающего формат передаваемых данных, структуру буферов, способы включения драйвера в состав ОС, способы вызова драйвера, набор общих процедур подсистемы ввода-вывода, которыми драйвер может пользоваться, и т. п.
Согласно этому определению драйвер вместе с контроллером устройства и прикладной программой воплощали идею многослойного подхода к организации программного обеспечения. Контроллер представлял нижний слой управления устройством, выполняющий операции в терминах блоков и агрегатов устройства (например, передвижение головки дисковода, побитную передачу байта по двухпроводному кабелю). Драйвер выполнял более сложные операции, преобразуя, например, данные, адресуемые в терминах номеров цилиндров, головок и секторов диска, в линейную последовательность блоков или устанавливая логическое соединение между двумя модемами через телефонную сеть. В результате прикладная программа уже работала с данными, преобразованными в достаточно понятную для человека форму, — файлами, таблицами баз данных, текстовыми окнами на мониторе и т. п., не вдаваясь в детали представления этих данных в устройствах ввода-вывода. Кроме того, помещение драйвера в привилегированный режим и запрет для пользовательских процессов выполнять операции ввода-вывода защищают критически важные для работы самой ОС устройства ввода-вывода от ошибок прикладных программ, а также позволяют ОС надежно контролировать процесс разделения устройств и их данных между пользователями и процессами.
В описанной схеме драйверы не делились на слои. При этом они выполняли задачи разного уровня сложности: как самые примитивные, например просто последовательно передавали контроллеру байты для дальнейшего использования, так и достаточно сложные, связанные с отработкой протокола взаимодействия между модемами или вычерчиванием на экране математических кривых.
Постепенно, по мере развития ОС и усложнения структуры подсистемы ввода-вывода, наряду с традиционными драйверами в операционных системах появились так называемые высокоуровневые драйверы, которые располагаются в общей модели подсистемы ввода-вывода над традиционными драйверами. Появление высокоуровневых драйверов можно считать дальнейшим развитием идеи многослойной организации подсистемы ввода-вывода. Вместо того чтобы концентрировать все функции по управлению устройством в одном программном модуле, во многих случаях гораздо эффективней распределить их между несколькими модулями в соседних слоях иерархии. Традиционные драйверы, которые стали называть аппаратными драйверами, низкоуровневыми драйверами, или драйверами устройств, подчеркивая их непосредственную связь с управляемым устройством, освобождаются от высокоуровневых функций и занимаются только низкоуровневыми операциями. Эти низкоуровневые операции составляют фундамент, на котором можно построить тот или иной набор операций в драйверах более высоких уровней.
При таком подходе повышается гибкость и расширяемость функций по управлению устройством — вместо жесткого набора функций, сосредоточенных в единственном драйвере, администратор ОС может выбрать требуемый набор функций, установив нужный высокоуровневый драйвер. Количество уровней драйверов в подсистеме ввода-вывода обычно не ограничивается каким-либо пределом, но на практике чаще всего используют от двух до пяти уровней драйверов.
Высокоуровневые драйверы оформляются по тем же правилам и придерживаются тех же внутренних интерфейсов, что и аппаратные драйверы. Единственным отличием является то, что высокоуровневые драйверы, как правило, не вызываются по прерываниям, так как взаимодействуют с управляемым устройством через посредничество аппаратных драйверов. Менеджер ввода-вывода управляет драйверами однотипно, независимо от того, к какому уровню он относится. При наличии большого количества драйверов разного уровня усложняются связи между ними, что, в свою очередь, усложняет их взаимодействие, и именно эта ситуация привела к стандартизации внутреннего интерфейса в подсистеме ввода-вывода и выделения специальной оболочки в виде менеджера ввода-вывода, выполняющего служебные функции по организации работы драйверов.
Необязательно все модули подсистемы ввода-вывода оформляются в виде драйверов. Например, в подсистеме управлениями дисками обычно имеется такой модуль, как дисковый кэш, который служит для кэширования блоков дисковых файлов в оперативной памяти. Достаточно специфические функции кэша делают нецелесообразным оформление его в виде драйвера, взаимодействующего с другими модулями ОС только с помощью услуг менеджера ввода-вывода.
Аппаратные драйверы после запуска операции ввода-вывода должны своевременно реагировать на завершение контроллером заданного действия, и для решения этой задачи они взаимодействуют с системой прерываний. Драйверы более высоких уровней вызываются уже не по прерываниям, а по инициативе аппаратных драйверов или драйверов вышележащего уровня. Не все процедуры аппаратного драйвера нужно вызывать по прерываниям, поэтому драйвер обычно имеет определенную структуру, в которой выделяется секция обработки прерываний (Interrupt Service Routine, ISR), которая и вызывается при поступлении запроса от соответствующего устройства диспетчером прерываний. Диспетчер прерываний можно считать частью подсистемы ввода-вывода, как это показано на рис. 8.5, а можно считать и независимым модулем ядра ОС, так как он служит не только для вызова секций обработки прерываний драйверов, но и для диспетчеризации прерываний других типов.
В унификацию драйверов большой вклад внесла операционная система UNIX. В ней все драйверы были разделены на два больших класса: блок-ориентированные (block-oriented) драйверы и байт-ориентированные (character-oriented) драйверы. Это деление является более общим, чем показанное на рис. 8.5.1 деление на вертикальные подсистемы. Например, драйверы графических устройств и драйверы сетевых устройств относятся к классу байт-ориентированных.
Блок-ориентированные драйверы управляют устройствами прямого доступа, которые хранят информацию в блоках фиксированного размера, каждый из которых имеет собственный адрес. Самое распространенное внешнее устройство прямого доступа — диск. Адресуемость блоков приводит к тому, что для устройств прямого доступа появляется возможность кэширования данных в оперативной памяти, и это обстоятельство значительно влияет на общую организацию ввода-вывода для блок-ориентированных драйверов.
Устройства, с которыми работают байт-ориентированные драйверы, не адресуемы и не позволяют производить операцию поиска данных, они генерируют или потребляют последовательности байт. Примерами таких устройств, которые также называют устройствами последовательного доступа, служат терминалы, строчные принтеры, сетевые адаптеры.
Деление всех драйверов на блок-ориентированные и байт-ориентированные оказывается полезным для структурирования подсистемы управления вводом-выводом. Тем не менее необходимо учитывать, что эта схема является упрощенной — имеются внешние устройства, драйверы которых не относятся ни к одному классу, например таймер, который, с одной стороны, не содержит адресуемой информации, а с другой стороны, не порождает потока байт. Это устройство только выдает сигнал прерывания в некоторые моменты времени.
Операционная система UNIX в свое время сделала еще один важный шаг по унификации операций и структуризации программного обеспечения ввода-вывода. В ОС UNIX все устройства рассматриваются как некоторые виртуальные (специальные) файлы, что дает возможность использовать общий набор базовых операций ввода-вывода для любых устройств независимо от их специфики. Эти вопросы обсуждаются в следующем разделе, посвященном файлам и файловым системам.
Поддержка синхронных и асинхронных операций ввода-вывода
Операция ввода-вывода может выполняться по отношению к программному модулю, запросившему операцию, в синхронном или асинхронном режимах. Смысл этих режимов тот же, что и для рассмотренных выше системных вызовов, — синхронный режим означает, что программный модуль приостанавливает свою работу до тех пор, пока операция ввода-вывода не будет завершена (рис. 8.3.1, а), а при асинхронном режиме программный модуль продолжает выполняться в мультипрограммном режиме одновременно с операцией ввода-вывода (рис. 8.3.1, б). Отличие же заключается в том, что операция ввода-вывода может быть инициирована не только пользовательским процессом — в этом случае операция выполняется в рамках системного вызова, но и кодом ядра, например кодом подсистемы виртуальной памяти для считывания отсутствующей в памяти страницы.

Рис. 8.5.2. Два режима выполнения операций ввода-вывода
Подсистема ввода-вывода должна предоставлять своим клиентам (пользовательским процессам и кодам ядра) возможность выполнять как синхронные, так и асинхронные операции ввода-вывода, в зависимости от потребностей вызывающей стороны. Системные вызовы ввода-вывода чаще оформляются как синхронные процедуры в связи с тем, что такие операции длятся долго и пользовательскому процессу или потоку все равно придется ждать получения результатов операции для того, чтобы продолжить свою работу. Внутренние же вызовы операций ввода-вывода из модулей ядра обычно выполняются в виде асинхронных процедур, так как кодам ядра нужна свобода в выборе дальнейшего поведения после запроса операции ввода-вывода. Использование асинхронных процедур приводит к более гибким решениям, так как на основе асинхронного вызова всегда можно построить синхронный, создав дополнительную промежуточную процедуру, блокирующую выполнение вызвавшей процедуры до момента завершения ввода-вывода. Иногда и прикладному процессу требуется выполнить асинхронную операцию ввода-вывода, например при микроядерной архитектуре, когда часть кода работает в пользовательском режиме как прикладной процесс, но выполняет функции ОС, требующие полной свободы действий и после вызова операции ввода-вывода.
Основные понятия безопасности. Базовые технологии безопасности. Конфиденциальность, целостность и доступность данных. Защита от сбоев и несанкционированного доступа
9.1 Основные понятия безопасности. Конфиденциальность, целостность и доступность данных. Базовые технологии безопасности.
Основные понятия безопасности
При рассмотрении безопасности информационных систем обычно выделяют две группы проблем: безопасность компьютера и сетевая безопасность. К безопасности компьютера относят все проблемы защиты данных, хранящихся и обрабатывающихся компьютером, который рассматривается как автономная система. Эти проблемы решаются средствами операционных систем и приложений, таких как базы данных, а также встроенными аппаратными средствами компьютера. Под сетевой безопасностью понимают все вопросы, связанные с взаимодействием устройств в сети, это прежде всего защита данных в момент их передачи по линиям связи и защита от несанкционированного удаленного доступа в сеть. И хотя подчас проблемы компьютерной и сетевой безопасности трудно отделить друг от друга, настолько тесно они связаны, совершенно очевидно, что сетевая безопасность имеет свою специфику.
Автономно работающий компьютер можно эффективно защитить от внешних покушений разнообразными способами, например просто запереть на замок клавиатуру или снять жесткий накопитель и поместить его в сейф. Компьютер, работающий в сети, по определению не может полностью отгородиться от мира, он должен общаться с другими компьютерами, возможно, даже удаленными от него на большое расстояние, поэтому обеспечение безопасности в сети является задачей значительно более сложной. Логический вход чужого пользователя в ваш компьютер является штатной ситуацией, если вы работаете в сети. Обеспечение безопасности в такой ситуации сводится к тому, чтобы сделать это проникновение контролируемым — каждому пользователю сети должны быть четко определены его права по доступу к информации, внешним устройствам и выполнению системных действий на каждом из компьютеров сети.
Помимо проблем, порождаемых возможностью удаленного входа в сетевые компьютеры, сети по своей природе подвержены еще одному виду опасности — перехвату и анализу сообщений, передаваемых по сети, а также созданию «ложного» трафика. Большая часть средств обеспечения сетевой безопасности направлена на предотвращение именно этого типа нарушений.
Вопросы сетевой безопасности приобретают особое значение сейчас, когда при построении корпоративных сетей наблюдается переход от использования выделенных каналов к публичным сетям (Интернет, frame relay). Поставщики услуг публичных сетей пока редко обеспечивают защиту пользовательских данных при их транспортировке по своим магистралям, возлагая на пользователей заботы по их конфиденциальности, целостности и доступности.
Конфиденциальность, целостность и доступность данных
Безопасная информационная система — это система, которая, во-первых, защищает данные от несанкционированного доступа, во-вторых, всегда готова предоставить их своим пользователям, а в-третьих, надежно хранит информацию и гарантирует неизменность данных. Таким образом, безопасная система по определению обладает свойствами конфиденциальности, доступности и целостности.
§ Конфиденциальность (confidentiality) — гарантия того, что секретные данные будут доступны только тем пользователям, которым этот доступ разрешен (такие пользователи называются авторизованными).
§ Доступность (availability) — гарантия того, что авторизованные пользователи всегда получат доступ к данным.
§ Целостность (integrity) — гарантия сохранности данными правильных значений, которая обеспечивается запретом для неавторизованных пользователей каким-либо образом изменять, модифицировать, разрушать или создавать данные.
Требования безопасности могут меняться в зависимости от назначения системы, характера используемых данных и типа возможных угроз. Трудно представить систему, для которой были бы не важны свойства целостности и доступности, но свойство конфиденциальности не всегда является обязательным. Например, если вы публикуете информацию в Интернете на Web-сервере и вашей целью является сделать ее доступной для самого широкого круга людей, то конфиденциальность в данном случае не требуется. Однако требования целостности и доступности остаются актуальными.
Действительно, если не предпринять специальных мер по обеспечению целостности данных, злоумышленник может изменить данные на сервере и нанести этим ущерб владельцу сервера.. Преступник может, например, внести такие изменения в помещенный на Web-сервере прайс- лист, которые снизят конкурентоспособность вашего предприятия, или испортить коды свободно распространяемого вашей фирмой программного продукта, что безусловно скажется на ее деловом имидже.
Не менее важным в данном примере является и обеспечение доступности данных. Затратив немалые средства на создание и поддержание сервера в Интернете, предприятие вправе рассчитывать на отдачу: увеличение числа клиентов, количества продаж и т. д. Однако существует вероятность того, что злоумышленник предпримет атаку, в результате которой помещенные на сервер данные станут недоступными для тех, кому они предназначались. Примером таких злонамеренных действий может служить «бомбардировка» сервера IP-пакетами с неправильным обратным адресом, которые в соответствии с логикой работы этого протокола могут вызывать тайм-ауты, а в конечном счете сделать сервер недоступным для всех остальных запросов.
Понятия конфиденциальности, доступности и целостности могут быть определены не только по отношению к информации, но и к другим ресурсам вычислительной сети, например внешним устройствам или приложениям. Существует множество системных ресурсов, возможность «незаконного» использования которых может привести к нарушению безопасности системы. Например, неограниченный доступ к устройству печати позволяет злоумышленнику получать копии распечатываемых документов, изменять параметры настройки, что может привести к изменению очередности работ и даже к выводу устройства из строя. Свойство конфиденциальности, примененное к устройству печати, можно интерпретировать так, что доступ к устройству имеют те и только те пользователи, которым этот доступ разрешен, причем они могут выполнять только те операции с устройством, которые для них определены. Свойство доступности устройства означает его готовность к использованию всякий раз, когда в этом возникает необходимость. А свойство целостности может быть определено как свойство неизменности параметров настройки данного устройства. Легальность использования сетевых устройств важна не только постольку, поскольку она влияет на безопасность данных. Устройства могут предоставлять различные услуги: распечатку текстов, отправку факсов, доступ в Интернет, электронную почту и т. п., незаконное потребление которых, наносящее материальный ущерб предприятию, также является нарушением безопасности системы.
9.2 Шифрование. Симметричные и ассиметричные алгоритмы шифрования. Одностороннее шифрование. Примеры применения шифрования.
Симметричные алгоритмы шифрования
На рис. 9.2.1 приведена классическая модель симметричной криптосистемы, теоретические основы которой впервые были изложены в 1949 году в работе Клода Шеннона. В данной модели три участника: отправитель, получатель, злоумышленник. Задача отправителя заключается в том, чтобы по открытому каналу передать некоторое сообщение в защищенном виде. Для этого он на ключе k зашифровывает открытый текст X и передает шифрованный текст Y. Задача получателя заключается в том, чтобы расшифровать Y и прочитать сообщение X. Предполагается, что отправитель имеет свой источник ключа. Сгенерированный ключ заранее по надежному каналу передается получателю. Задача злоумышленника заключается в перехвате и чтении передаваемых сообщений, а также в имитации ложных сообщений.

Рис. 9.2.1.Модель симметричного шифрования
Модель является универсальной — если зашифрованные; данные хранятся в компьютере и никуда не передаются, отправитель и получатель совмещаются в одном лице, а в роли злоумышленника выступает некто, имеющий доступ к компьютеру в ваше отсутствие.
Наиболее популярным стандартным симметричным алгоритмом шифрования данных является DES (Data Encryption Standard). Алгоритм разработан фирмой IBM и в 1976 году был рекомендован
В симметричных алгоритмах главную проблему представляют ключи. Во-первых, криптостойкость многих симметричных алгоритмов зависит от качества ключа, это предъявляет повышенные требования к службе генерации ключей. Во-вторых, принципиальной является надежность канала передачи ключа второму участнику секретных переговоров. Проблема с ключами возникает даже в системе с двумя абонентами, а в системе с п абонентами, желающими обмениваться секретными данными по принципу «каждый с каждым», потребуется их(и-1)/2 ключей, которые должны быть сгенерированы и распределены надежным образом. То есть количество ключей пропорционально квадрату количества абонентов, что при большом числе абонентов делает задачу чрезвычайно сложной. Несимметричные алгоритмы, основанные на использовании открытых ключей, снимают эту проблему.
Несимметричные алгоритмы шифрования
Особенность шифрования на основе открытых ключей состоит в том, что одновременно генерируется уникальная пара ключей, таких, что текст, зашифрованный одним ключом, может быть расшифрован только с использованием второго ключа и наоборот.
В модели криптосхемы с открытым ключом также три участника: отправитель, получатель, злоумышленник (рис. 9.2.3). Задача отправителя заключается в том, чтобы по открытому каналу связи передать некоторое сообщение в защищенном виде. Получатель генерирует на своей стороне два ключа: открытый Е и закрытый D. Закрытый ключ D (часто называемый также личным ключом) абонент должен сохранять в защищенном месте, а открытый ключ Е он может передать всем, с кем он хочет поддерживать защищенные отношения. Открытый ключ используется для шифрования текста, но расшифровать текст можно только с помощью закрытого ключа. Поэтому открытый ключ передается отправителю в незащищенном виде. Отправитель, используя открытый ключ получателя, шифрует сообщение X и передает его получателю. Получатель расшифровывает сообщение своим закрытым ключом D.