Спутниковая система навигации из состава ПНК GARMIN G1000– назначение, принцип действия, управление, питание и защита.
Бортовые радиосистемы навигации и посадки самолета Cessna 172S
Принцип работы систем спутниковой навигации
Возможность определять координаты вне зависимости от капризов природы и времени суток появилась с началом освоения космоса. Днем рождения спутниковой навигации принято считать 4 октября 1957 года, когда был запущен первый искусственный спутник Земли. Однако лишь в конце 70х годов была создана первая спутниковая радионавигационная система (СРНС), которая позволяла определить координаты объекта при помощи радиосигналов, передаваемых со спутника.
СРНС применяются для определения положения и ориентации сухопутных, воздушных и морских подвижных объектов. При строительстве туннеля под ЛаМаншем строители начали копать с противоположных сторон, сопоставляя свои местоположения при помощи СРНС NAVSTAR (GPS), что, в результате, позволило им встретиться ровно посередине. Системы навигации используются геодезистами, спасателями, работают на баллистических ракетах. Не первый год за рубежом в комплектацию некоторых моделей автомобилей входит приемник GPSсигналов (при ввозе автомобилей в Россию приемники отключаются — этого требует наше законодательство).
Основными требованиями, которые предъявляются к СРНС, являются точность определения координат и времени и возможность получать навигационную информацию в любой момент. СРНС первого поколения — «Транзит» в США и «Цикада» в СССР — этим требованиям не удовлетворяли: вопервых, длительные перерывы между сеансами навигации (до 30 минут в приполярных районах и до 2 часов в экваториальных) не позволяли пользователю определять свое местоположение, когда захочется. Вовторых, погрешность определения горизонтальных координат подвижного объекта была довольно большой — от 10 до 100 м. Кроме того, СРНС первого поколения не давали информации о высоте и скорости объекта.
В СРНС второго поколения был внесен ряд изменений. Проблема точности и оперативности определения координат была решена за счет увеличения количества спутников в системе.
Чтобы пользователь мог в любой момент узнать свое местоположение и время, необходимо было обеспечить одновременную радиовидимость как минимум четырех спутников, расположенных определенным образом.
Для решения этой задачи достаточно, чтобы на орбите находилось 18 спутников, однако было решено использовать 24 — для повышения точности определения координат самих спутников.
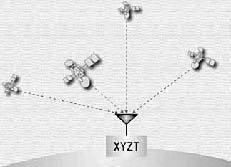
Принцип работы систем спутниковой навигации таков. Приемник навигационных сигналов измеряет задержку распространения сигнала от каждого из видимых спутников до приемника. Задержка сигнала, умноженная на скорость света, — это расстояние от спутника в момент излучения до приемника в момент приема. Из принятого сигнала приемник получает информацию о положении спутника.
Геометрически работу спутниковой навигационной системы можно продемонстрировать следующим образом: пользователь находится в точке пересечения нескольких сфер, центрами которых являются видимые спутники. Радиусы сфер равны дальности до каждого из спутников. Для определения широты и долготы приемнику необходимо принимать сигналы как минимум от трех спутников; прием сигнала от четвертого спутника позволяет определить и высоту объекта над поверхностью. Эти данные позволяют найти координаты пользователя, решив некоторую систему уравнений. При определении координат объекта возникают ошибки, связанные с влиянием ионосферы, температуры воздуха, атмосферного давления и влажности (каждый фактор вносит погрешность до 30 м). Эфемеридная погрешность (разница между расчетным и реальным положением спутника) составляет от 1 до 5 м; интерференция тоже вносит свой вклад. Суммарная ошибка может достигать 100 м.
Для уменьшения погрешностей используется так называемый дифференциальный режим GPS (Differential GPS). В этом режиме приемник пользователя получает поправки к своим координатам от базовой станции. Обычно поправки передаются в реальном времени по радиоканалу. В результате точность определения координат достигает 15 м. Новым классом систем относительной навигации являются системы, обеспечивающие (в реальном времени) точность местоопределения порядка 1 см. Суть технологии такова: опорная станция и приемник пользователя получают сигналы от спутников. Затем опорная станция посылает результаты измерения фазы и псевдодальности всех видимых спутников на приемник пользователя. В результате обработки на приемнике относительные координаты определяются с точностью до 1 см в реальном времени с надежностью 0,999.
На сегодняшний день существует две крупные спутниковые радионавигационные системы: NAVSTAR и ГЛОНАСС.