Основные характеристики ИМ типа МЭО, МЭМ и МЭП
Таблица 4.2
Раздел 4. Лекция 2. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСГРОЙСГВА
Приведите примеры сочленения ИМ и РО.
Приведите классификацию РО для сыпучих материалов.
Приведите классификацию РО для жидкостей и газов.
Приведите классификацию и типы регулирующих органов.
4.Какими основными условиями определяется выбор привода?
5.Как можно рассчитать величину крутящего момента поворотных заслонок?
6.Какими основными условиями определяется выбор электрических контакторов, реле, индукционных преобразователей?
7.На каком основании осуществляется выбор регулирующих органов?
8.Как рассчитать дроссельные заслонки?
Литература по лекции 4.
1.Ульянов В,А., Леушин И.О., Гущин В,Н. Технологические измерения, автоматика и управление в технических системах. Ч.2. Н.Новгород: НГТУ, 2002. –С.236-260.
2.Клюев А.С. Автоматическое регулирование. М.: Высшая школа, 1986. 368 с.
Радионов В.Д.,, Терехов В.А., Яковлев В.Б. Технические средства АСУ ТП. М.: Высшая школа, 1989. 263 с.
4.Нагорный В.С., Денисов А.А. Устройства автоматики гидро- и пневмосистем. М.: Высшая школа, 1991. С.71-228.
5.Дембовский В.В. Автоматизация литейных процессов. Справочник. Л.: Машиностроение, 1989. 264 с.
6.Монтаж средств измерений и автоматизации/Алексеев К.А., Антипин В.С., Ганашек А.Л. и др. М.: Энергоатомиздат, 1988. С.430-448.
7.Промышленные приборы и средства автоматизации. Справочник/Под ред В.В. Черенкова. – Л.: Машиностроение, 1987. – 846 с.
Электрические исполнительные устройства (ЭИУ) находят преимущественное распространение в системах автоматизации, использующих изделия электрической ветви ГСП. При необходимости использовать пневматические и гидравлические ИУ, последние дополняются электропневмо- и электрогидропреобразователями. Электрические исполнительные устройства разделяются на четыре группы: позиционного действия, постоянной скорости, переменной скорости и усилители мощности.
Исполнительные механизмы ЭИУ позиционного типа, постоянной или переменной скорости состоят из электродвигателя и редуктора. Такой ИМ по своим динамическим свойствам соответствует интегрирующему звену, если в качестве выходной переменной в ИУ принят угол поворота (перемещение). Вследствие этого, силовая часть может формировать интегральную составляющую таких законов регулирования, как ПИ и ПИД в структурах регулятора (собственно регулятор при этом формирует П- и ПД - составляющие). Наибольшее распространение получило именно такое использование ИМ.
Другой способ использования ИМ с электродвигателями состоит в охвате двигателя жесткой обратной связью, и в этом случае ЭИУ является пропорциональным звеном (точнее, малоинерционным), положение выходного органа которого пропорционально входному сигналу Исполнительные механизмы с корректирующими обратными связями используют в ЭИУ переменной скорости.
Качество работы ЭИУ с электродвигателями характеризуют такими показателями, как номинальный момент, время полного хода, выбег, люфт, гистерезис, импульсные характеристики, режим работы.
Номинальный момент ИМ развивают при всех допустимых условиях эксплуатации, при понижении напряжения питания до 0,85 U ном. Пусковой момент при номинальном напряжении питания должен не менее чем в 1,7 раза превышать номинальный.
Время полного хода Тимвыбирают, исходя из допустимого времени Тимперестановки затвора РО от начала до конца. Это время равно Тим = β-1Тро , где β - отношение диапазона рабочего перемещения выходного органа к величине полного хода.
Выбег есть перемещение выходного органа ИМ после выключения механизма, работающего в установившемся режиме. Выбег желательно иметь таким, чтобы после выключения двигателя изменение сигнала обратной связи по регулируемому параметру было в пределах установленной зоны нечувствительности регулятора. Согласно требованиям ГОСТ 7192-80Е, величина выбега не должна превышать 1%для ЭИУ с временем полного хода ю с, 0,5% для механизмов с временем 25 с и 0,25% для механизмов с временем 63 с.
Люфт и гистерезис характеризуют нелинейности статической характеристики ЭИУ. Люфт образуется свободным ходом выходного органа при неподвижном вале электродвигателя из-за зазора в зацеплении кинематических узлов редуктора, износа контактирующих поверхностей. Согласно ГОСТ 7192-80Е, люфт выходного органа не должен превышать 1° для однооборотных ЭИУ с номинальной нагрузкой более 40 Н-м; 3° для многооборотных ЭИУ; 0,2 мм для прямоходных ЭИУ с нагрузкой до 1 кН и 0,5 мм при нагрузке свыше 1 кН. Гистерезис между положением выходного органа и сигналом датчика положения складывается из люфта механической передачи и вариацией показания датчика. По стандарту гистерезис не должен быть более 1,5% от полной шкалы показаний датчика при нелинейности статической характеристики не менее 2,5%.
Импульсная характеристика ЭИУ определяется как средняя относительная скорость перемещения выходного органа. Для ЭИУ постоянной скорости с импульсным сигналом управления рассматривается отношение величины перемещения выходного органа к длительности импульса, вызывающего перемещение. Если это перемещение брать в долях от полного хода, то соответственно их отношение даст значение S. Значение S = f(Δt), где Δt — относительная длительность импульса управления, и образует импульсную характеристику. Для идеальных ЭИУ постоянной скорости S=1. Реально значение S для отечественных ЭИУ постоянной скорости лежит в диапазоне 0,5 -1,5-
Режим работы ИУ - повторно-кратковременный реверсивный, с частотой до 320 включений в час и продолжительностью до 25% при нагрузке на выходном органе в пределах от номинальной противодействующей до 0,5 от номинального значения сопутствующей. К ЭИУ предъявляются требования к повышенной частоте включений: в течение часа 600 и более с интервалом времени между выключением и включением на обратный ход не менее 50 мс.
Позиционные электрические исполнительные устройства предназначены для установки РО в определенном фиксированном положении. Чаще всего таких положений бывает два - « Открыто » и « Закрыто », хотя возможно построение и многопозиционных ЭИУ (например, с помощью шаговых двигателей). Примером ЭИУ позиционного действия является исполнительный механизм типа ИМТМ-4/2,5, предназначенный для быстрого перемещения РО в системах позиционного и дистанционного управления. Номинальный момент на валу этого ИМ составляет 40 Н-м, время одного полного оборота выходного вала - 2,5 с.
Исполнительный механизм состоит из трехфазного асинхронного двигателя типа АОЛ21-4 мощностью 270 Вт с присоединенным к нему червячным понижающим редуктором и концевыми выключателями. Для устранения вращения после отключения от сети питания ИМ имеет фрикционный тормоз, поэтому «выбег» выходного вала не превышает 3°.
К числу позиционных ИУ относятся исполнительные механизмы ДР-М, ДP-1M, предназначенные для управления РО с малыми перестановочными усилиями. Исполнительные механизмы типа ДР используются в двухпозиционных системах регулирования для работы по принципу «открыть - закрыть». Устройство этих ИМ подобно устройству ИМТМ-4/2,5: однофазный конденсаторный электродвигатель с зубчатым понижающим редуктором и предельный концевой выключатель заключены в общий пыленепроницаемый корпус. ДР-М имеет два выходных устройства: диск, вращающийся на 180°, поворотный РО, шток с ходом 19 мм, воздействующий на поступательный РО. ИМ типа ДР-1M имеет только поворотный диск.
В позиционных системах, системах программного управления для обработки типовых команд используются шаговые двигатели (ШД). В шаговых ИУ электродвигатель управляется последовательностью импульсов и перемещается строго на определенный шаг (угол), пропорциональный числу импульсов управления. По принципу действия ШД представляет собой дискретный синхронный двигатель, ротор которого поворачивается после каждого импульса на входе системы управления и остается неподвижным при отсутствии импульса. Блок управления ШД содержит коммутатор на логических схемах (триггеры, схемы совпадения) и усилитель мощности (релейные усилители). Шаговые двигатели имеют более низкие энергетические показатели, чем регулируемые двигатели непрерывного действия, поэтому ШД используются в маломощных системах, в частности в системах ЧПУ. Они широко используются в качестве электромеханических преобразователей унитарного кода в угол поворота, воздействуя на задатчик программы силового следящего привода.
Исполнительные устройства постоянной скорости являются силовыми устройствами пропорционального действия: РО с помощью таких ЭИУ устанавливаются в любое промежуточное положение в зависимости от величины и длительности управляющего сигнала с выхода регулятора.
В практике автоматизации традиционно наибольшей известностью пользуются ЭИУ постоянной скорости, управляемые от импульсных регуляторов последовательностью импульсов различной длительности (информативный признак). Частота вращения выходного органа ИМ постоянна и не зависит от величины (амплитуды) управляющего сигнала, вследствие чего в системах регулирования с ЭИУ постоянной скорости реализуется широтно-импульсная модуляция сигналов управления.
Минимальная длительность импульсов для отечественных ЭИУ составляет 0,1 с. Между командами на перемещение (это время составляет более 90% срока службы) выходной вал ЭИУ сохраняет свое положение при наличии активной механической нагрузки в условиях вибрации. Для этого ЭИУ снабжаются автоматическим устройством торможения. К ЭИУ предъявляются повышенные требования по надежности, так как ни дублирование, ни «горячее» резервирование в этой части замкнутой системы невозможны.
Электрические исполнительные устройства постоянной скорости типов МЭО, ИМТ, МЭИ являются основными в системах промышленной автоматики (энергетике, металлургии). В зависимости от характера изменения выходного органа различают одно- и многооборотные (МЭО, ИМТ и МЭМ соответственно) и прямоходные (МЭИ) ЭИУ.
В ЭИУ постоянной скорости ранних выпусков применялись асинхронные электродвигатели с короткозамкнутым ротором типа АОЛ и редукторы на основе червячной передачи (ЭИУ типов МЭОБ, МЭОК и ИМТ). Это упрощало конструкцию редуктора, и автоматически решался вопрос самоторможения (рис.4.6).
Дальнейшее повышение качественных показателей, надежности и долговечности ЭИУ при работе «на упор» и большей частоте включений (до 300 - 600 включений в час) потребовало разработки специальных двигателей типа ДАУ. Для уменьшения разброса значения средней относительной скорости при отработке импульсов управления малой длительности потребовались эффективные тормозные устройства. Стремление к повышению ресурса ЭИУ при работе « на упор » вызвало необходимость применения редукторов с цилиндрическими передачами, отличающимися большими КПД. Все эти качества нашли воплощение в ЭИУ типа ВЭО.

Рис.4.6.Общий вид, габаритные и присоединительные размеры механизма ИМТМ-40/2,5-83:
1 – электродвигатель; 2 – штуцерный ввод; 3 – редуктор; 4 – узел микровыключателей; 5 – фракционный тормоз; 6 – коробка зажимов
Исполнительный механизм применяется с магнитным пускателем типа ПМЕ. Электрическая схема внешних соединений ИМ с пускателем ПМЕ приведена на рис.4.7.
Рис.4.7.Электрическая схема внешних соединений ИМ с пускателем ПМЕ:
М – электродвигатель; К – колодка электродвигателя; Х – колодка зажимов; S1, S2 – микропереключатели; Р1, Р2 – реле пускатели

Выпуск в начале 80-х годов новой серии электродвигателей типа 4А с лучшими технико-экономическими показателями в сравнении с двигателями типа АОЛ, разработка тиристорных устройств бесконтактного управления и блокировки двигателя по потребляемому току составили основу для современного параметрического ряда ЭИУ постоянного тока типа МЭО.
Перспективное направление в развитии ЭИУ постоянного тока состоит в применении низкооборотных электродвигателей с электромагнитной редукцией частоты вращения типа ДСР-4 и ДСР-10 (мощности 4 и 10 Вт) (рис.4.8). Особенностью этих двигателей является возможность весьма высокой частоты включений - до 1200 включений в час (для АОЛ - 120 включений в час).
Рис.4.8.Общий вид, габаритные и присоединительные размеры исполнительного механизма МЭО с электродвигателем ДСР:
1 – рычаг; 2 – болт заземления; 3 – датчик; 4 – панель; 5 – ручной пивод; 6 – редуктор; 7 – штепсельный разъём; 8 – электродвигатель; 9 – зубчатая пара; 10 – червячная пара

На базе электродвигателей с электромагнитной редукцией в России осуществлялось серийное производство прямоходных ЭИУ типа МЭИ Такие ЭИУ значительно упрощают сочленение арматурой, исключают люфт. На рис. 4.9 изображена кинематическая схема ЭИУ типа МЭП. Основная кинематическая цепь механизмов состоит из низкооборотного электродвигателя типа ДСРТ, механического тормоза автоматического действия трехступенчатого редуктора на основе цилиндрической передачи и прямоходной приставки на основе шариковинтового преобразователя движения. Для связи с блоком сигнализации положения (типа БСПТ10) предусмотрен дополнительный редуктор. Быстрый пуск и малый выбег двигателя ДСРТ позволяют обходиться в МЭП без тормозных устройств. Однако как здесь, так и в ЭИУ типов МЭО-16 и МЭО-40 потребовалось применение в редукторе самотормозящейся передачи.
Электрическое исполнительное устройство постоянной скорости, кроме ИМ, содержат устройства, выполняющие дополнительные функции (см. рис. 4.1). Для изменения положения выходного органа ИМ предусматривается устройство ручного управления. Для дистанционной передачи информации о текущем значении положения РО оператору или для введения в автоматическую систему, устанавливаются датчики (один или два) выходного органа ЭИУ. Для выдачи информации о положении выходного органа в виде дискретного сигнала предусматриваются путевые и конечные выключатели. Иногда устанавливаются выключатели по моменту или усилию, которые выдают дискретный сигнал при достижении величины момента на выходном органе или усилия заданного уровня.
Важным устройством ЭИУ является блок усиления (управления) ИМ. Реализация этого блока может быть в виде контактной аппаратуры электромагнитных реле и магнитных пускателей, а также в виде бесконтактных устройств - магнитных усилителей, дросселей насыщения, бесконтактных реверсивных пускателей на полупроводниковых силовых устройствах - тиристорах и симисторах.
Рис. 4.9- Кинематическая схема ЭИУ типа МЭП:
1 - редуктор; 2 - привод блока сигнализации; з - блок сигнализации положения; 4 - приставка прямоходная; 5- ручка; 6 - электродвигатель; 7~ тормоз
 В настоящее время с контактным управлением выпускается еще большая часть ЭИУ постоянного тока. Причиной этого является простота исполнения, низкая стоимость и доступность в приборостроении контактной аппаратуры. Входным сигналом контактных пускателей служит напряжение постоянного тока 24 В, 400 мА. Промышленность выпускает реверсивные магнитные МКР-0-58, рассчитанные на входные сигналы 24 В постоянного тока и 22O В переменного тока, ПМРТ-69 и МПЕ.
В настоящее время с контактным управлением выпускается еще большая часть ЭИУ постоянного тока. Причиной этого является простота исполнения, низкая стоимость и доступность в приборостроении контактной аппаратуры. Входным сигналом контактных пускателей служит напряжение постоянного тока 24 В, 400 мА. Промышленность выпускает реверсивные магнитные МКР-0-58, рассчитанные на входные сигналы 24 В постоянного тока и 22O В переменного тока, ПМРТ-69 и МПЕ.
Надежность и повышенный срок службы ЭИУ с магнитными усилителями в контурах управления с повышенной частотой включения обусловили их широкое распространение. Однако внушительные размеры и масса УМД (от 12 до 60 кг), большая мощность входного сигнала (8 - 10 Вт), трудоемкость изготовления магнитных усилителей в значительной мере препятствовали расширению их производства.
Высокоэффективные бесконтактные ЭИУ созданы на основе тиристоров и симисторов. Эти блоки по размерам, массе и стоимости приближаются к аналогичным устройствам контактного исполнения, но имеют практически неограниченный ресурс по числу включении и не требуют обслуживания в течение всего срока службы.
На рис. 4.10 изображены схемы тиристорных коммутаторов в цепи статора асинхронного двигателя. Для тиристорного управления асинхронных двигателей в режиме непрерывных токов, угол управления (задержка по фазе управляющих импульсов относительно нуля фазы опорного напряжения, например, питающей сети) меняется от 20 до 80°, при этом управляющий импульс тиристора должен иметь достаточную крутизну и ширину не менее 60°. Источником управляющих импульсов в бесконтактных коммутирующих устройствах ЭИУ являются блокинг-генераторы, возбуждаемые сигналами с блоков обратных связей ЭИУ.

Рис. 4.4- Схемы тиристорных коммутаторов: а - тиристорная диодная; б - симисторная
Промышленностью выпускаются бесконтактные реверсивные пускатели типа ПБР (ПБР-2-3 и ПБР-2М) для управления двигателями ДАУ, ДСР в составе ЭИУ типа МЭО; ПБР-3А для управления двигателями типов АОЛ, 4 А мощностью 120, 180 и 370 Вт. Управление этими пускателями может осуществляться как ключами регуляторов и устройств дистанционного управления, так и от регуляторов с выходным сигналом в виде постоянного напряжения (двухполупериодное выпрямление напряжения со средним значением 24 ± 6 В). Коммутация силовых цепей управления электродвигателями производится бесконтактными ключами, выполненными на основе симисторов.
В основу бесконтактных ЭИМ переменной скорости положен способ регулирования скорости асинхронного двигателя с короткозамкнутым ротором при постоянной частоте, путем изменения значения или симметрии напряжения, подводимого к обмотке двигателя. Напряжение в бесконтактных ИМ переменной скорости изменяется с помощью дросселей насыщения или магнитных усилителей. Применение асинхронных двигателей с короткозамкнутым ротором (в частности, асинхронных двигателей с массивным ферромагнитным ротором) обусловлено их мягкими механическими характеристиками, что дает возможность плавно регулировать частоту вращения в широких пределах путем изменения подводимого к обмотке статора напряжения. Для расширения зоны пропорциональности между величиной управляющего сигнала и скоростью, а также для повышения устойчивости работы ИМ при малых скоростях вращения ротора в ИМ переменной скорости вводится стабилизирующая отрицательная обратная связь (ОСС) по скорости вращения. Кроме ОСС, в ИМ переменной скорости применяют устройства ОС по положению выходного вала редуктора, что позволяет использовать ИМ переменной скорости в системах пропорционального регулирования.
Из серийно выпускаемых бесконтактных ЭИУ переменной скорости можно назвать исполнительные механизмы типа ИМ-Б, БИМ, МЭК-Б, МЭК-25Б, предназначенные для перемещения однооборотных РО. Для реализации надежных и мощных ЭИУ переменной скорости необходим довольно сложный блок усиления большой мощности (блок управления) для питания обмотки статора или фазного ротора на силовых полупроводниковых элементах. По этой и другим причинам ЭИУ переменной скорости пока не нашли столь широкого распространения в системах промышленной автоматики, как ЭИУ постоянной скорости.
В табл. 4.2 приведены некоторые характеристики ИМ типов МЭО, МЭМ и МЭП.
На рис. 4.11 показан общий вид электрического исполнительного механизма МЭО. На рис. 4.12 дана принципиальная электрическая схема управления МЭО.
К исполнительным элементам систем управления электротермическими установками (ЭТУ) относятся трансформаторы со ступенчатым регулированием напряжения и коммутационная аппаратура (контакторы, тиристорные переключатели).
Для питания электропечей сопротивления используются низковольтные однофазные и трехфазные сухие трансформаторы мощностью до 250 кВА с 4,8 или 19 ступенями напряжения, переключаемыми с помощью изменения перемычек или переключателей ступеней напряжения.
Для питания индукционных установок промышленной частоты служат одно- и трехфазные трансформаторы с первичным напряжением 6 и 10 кВ, вторичным напряжением 510-2400 В и мощностью от 400 до 2000 кВА.

|
Примечание: г - символ К обозначает модификацию МЭО - исполнительные механизмы выпускаются на номинальные напряжения 220/380 В, 50 Гц при работе с магнитным пускателем МКР-0-58, усилителем У101 или бесконтактным реверсивным пускателем ПБР-3. Для остальных механизмов питание 220 В, 50 Гц при работе с магнитным пускателем МКР-0-58 или бесконтактным реверсивным пускателем ПБР-2; *2 - для многооборотных ИМ указано время одного оборота выходного вала; *3 - для прямоходного ИМ указано усилие на штоке, Н; *4 - время полного штока, с
Для дуговых сталеплавильных и рудно-термических печей используются специальные трех- и однофазные высоковольтные трансформаторы с масляным охлаждением мощностью до 125 MB-А с первичным напряжением 6, 10 35 кВ. Наиболее мощные агрегаты выполняют на напряжение но или 22O кВ. Трансформаторы имеют от 9 до 23 ступеней напряжения, причем переход с одной ступени на другую в агрегатах до 125 МВА осуществляется с помощью переключающего устройства ПБВ, а в агрегатах выше10 МВА - с помощью переключающего устройства РПН.
Дискретное регулирование электротехнических устройств осуществляется с помощью коммутационной аппаратуры, подключающей их к разным ответвлениям трансформатора. Такими аппаратами, работающими на низких напряжениях (до 500 В), являются электромагнитные контакторы и тиристорные переключатели.

Рис. 4.11. Электрический исполнительный механизм МЭО: 1 - сервопривод; 2 - блок сервопривода; з - электродвигатель; 4 - редуктор; 5 - выходной рычаг; 6 – ручной маховик
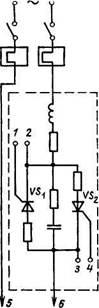
Принципиальная схема однофазного тиристорного переключателя приведена на рис. 4.13. В этой схеме осуществлено встречное параллельное включение тиристоров VSt и VS2, которые защищены от токов короткого замыкания быстродействующими плавкими предохранителями. Управление включением и отключением переключателя осуществляется от схемы, подающей сигналы на управляющие электроды тиристоров. Тиристорные переключатели выпускаются на токи до 250 В и мощности до 25 кВт в однофазном исполнении и до 285 кВт в трехфазном.
К устройствам с плавным регулированием питающего напряжения относят системы с различными трансформаторами: с плавным регулированием напряжения; с индукционными регуляторами напряжения; с магнитными усилителями и тиристорными регуляторами напряжения.
Для плавного регулирования напряжения ЭПС используют регулировочные трансформаторы: одно- и трехфазные номинальной мощностью 25 - 250 кВ-А, сухие и масляные. Изменение вторичного напряжения достигается регулированием индуктивной связи первичной и вторичной обмоток путем перемещения подвижной вторичной обмотки относительно неподвижной первичной. Перемещение подвижных обмоток производится с помощью ручного или электрического привода с дистанционным управлением. Принцип действия таких индукционных регулирующих устройств напряжения основан на изменении угла поворота обмотки ротора относительно неподвижной обмотки статора. Индукционные регуляторы выпускают с первичным напряжением 22O и 380 В, мощностью от 17 до 3000 кВА.

Рис. 4.12. Принципиальная электрическая схема управления исполнительным механизмом МЭО с электродвигателем ДАУ с токовым датчиком БСПТ/К от регулирующего прибора РЩ-У: БРУ-42- блок ручного управления; ПБР-2М - пускатель бесконтактный реверсивный; МЭО - исполнительный механизм с электродвигателем ДАУ; БСПТ/2К - блок питания
Тиристорные преобразователи получили широкое применение в системах управления печами сопротивления, индукционными плавильными и нагревательными установками, дуговыми печами, установками
плазменно-дугового и электронно-лучевого переплава, а также электродвигателями различных механизмов электротехнических устройств. Они подразделяются на преобразователи переменного, постоянного тока и частоты.
Тиристорные преобразователи переменного напряжения входят в состав, как прецизионных регуляторов температуры, так и регуляторов общепромышленного назначения. Их выполняют однофазными (тип РНТО) и трехфазными (тип РНТТ). И те и другие выполняются по встречно-параллельной схеме включения тиристоров (рис. 4.14).
Рис. 4.13. Принципиальная схема однофазного тиристорного переключателя: 1-4- выводы к схеме управления; 5,6- выводы к нагрузке
Однофазные тиристорные управляемые источники питания типа РНТО выпускают для напряжения питания 220 и 380 В, токов от 63 до 600 А и мощности от 12 до 200 кВт. Трехфазные регуляторы РНТТ выпускаются для тех же токов и мощности от 33 до 590 кВт. Они изготавливаются с естественным охлаждением для токов 63 - 160 А и с водяным 250 - 600 А. Номинальный входной сигнал источников 5 или 20 мА, пределы регулирования выходного напряжения (0,05 - 1,1) UH0M.