Виды переходных процессов в САУ.
Режим
Рис.5.46.Колебательный расходящийся Рис.5.47.Апериодический сходящийся режим
Рис.5.44. Колебательный режим Рис. 5.45.Колебательный сходящийся режим
Рис.5.42.Устойчивость импульсных САУ
Рис.5.39. Пример дискретной (цифровой (АСУ) при включении в систему управления вычислительного устройства
Рис.5.38. Пример системы стабилизации температуры непрерывного действия
Рис.5.37 Пример регулятора непрерывного вида
Рис.5.36.
Рис.5.34. Качество процесса управления
Рис.5.30.Системы управления
Приведите и прокомментируйте пример САУ температуры в печи.
Прокомментируйте принципиальную и функциональную схемы современной САР уровня жидкости.
Дайте характеристику статической и астатической САУ на примере поддержания уровня жидкости, их характерные особенности.
Дайте определение САУ.
Прокомментируйте характеристику и процесс двухпозиционного регулирования.
Прокомментируйте структурные схемы регулирования температуры и давления в электропечи.
Прокомментируйте принципиальную схему оптимального управления.
Прокомментируйте принципиальную схему экстремального управления.
10.В чём выражается принцип оптимальности управления?
11.В чём выражается принцип адаптивности управления?
14.Что такое контур регулирования и какие обратные связи существуют?
Литература по лекции 2.
1.Ульянов В,А., Леушин И.О., Гущин В,Н. Технологические измерения, автоматика и управление в технических системах. Ч.1. Н.Новгород: НГТУ, 2000. –С.7-77.
2.Майзель М.М. Автоматика и системы управления производственными процессами. М.: Высшая школа,1972. С.85-264.
3.Глинков Г.М., Косырев А.И., Шевцов Е.К. Контроль и автоматизация металлургических процессов. М.: Металлургия, 1989. С.94-143.
4.Воронов А.А., Титов В.К., Новогранов Б.Н. Основы теории автоматического регулирования и управления. М.: Высшая школа, 1977. С.154-356.
5.Коганов В.Ю., Блинов О.М., Беленький А.М. Автоматизация управления металлургическими процессами. М.: Металлургия, !974. С.17-80.
6.Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория Базовых Знаний, 2002. С.243-564.
7.Филипс Ч., Харбор Р. Системы управления с обратной связью. М.: Лаборатория Базовых знаний, 2001. С.113-326.
8.Методы классической и современной теории автоматического управления. Т.1 /Под ред. К.А. Пупкова. М.: МГТУ, 2004. С.150-179.
9.Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. СПб.: БХВ- Петербург, 2004.
системе управления, характеризуя присущие её свойства, структуру, состав, взаимосвязь и процесс взаимодействия составляющих элементов. Организация - статика производства, управление – динамика. Однако организация как форма существования системы обладает свойством динамичности, что подтверждается непрерывным процессом внедрения на предприятиях новой техники, технологии, повышением уровня автоматизации управления. Организация производства и система управления тесно взаимосвязаны.
Технологический объект управления подвержен воздействию различных внешних т внутренних возмущений, вследствие чего управляемая величина отклоняется от заданного значения. Задачей устройства управления является обеспечение соответствия её заданному значению путём передачи на на ОУ необходимого управляющего воздействия (рис.5.30).
САУ, управляющие только по заданному воздействию g(x),представляющие команды программы, являются системами жёсткого управления, так как при этом не учитываются действительные значения величины у(τ) и возмущающего воздействия f(τ), которые считаются постоянными. Эти САУ дают удовлетворительное качество управления лишь при высокой стабильности параметров ТОУ и внешней среды и при невысоких требованиях к точности. По структуре эти САУ являются разомкнутыми, так как не имеют обратной связи по управляемому параметру у(τ) и не образуют замкнутого контура управления.
Управление по возмущению (рис.5.30, а) основано на принципе компенсации возмущений и относится к разомкнутому типу управления. Управляемый параметр не изменяется, а используется информация о внешнем основном воздействии у(τ). Недостаток данной системы управления – в случае преобладания неконтролируемых возмущений z(τ) это способ не даёт требуемой точности.
Более высокое качество управления получить замкнутые САУ (рис.5.30, б) по отклонению, в которых используется информация об управляемой величине у(τ) и задающем воздействии g(x). Сначала измеряется у(τ), затем эти значения сравниваются с заданными и при наличии разности (сигнала рассогласования) вырабатывается управляющее воздействие G(x), направленное в сторону уменьшения сигнала рассогласования. Информация об у(τ) передаётся в устройство управления, образуя контур главной обратной связи.. Данный принцип иногда называют компенсационным принципом Ползунова – Уатта. Недостаток такой системы управления – затруднено управление, возникающее при разработке быстродействующих систем управления, особенно для сложных инерционных объектов. Стремление повысить точность работы такой системы и увеличить коэффициент усиления приводит к потере устойчивости.
Комбинированное управление использует информацию одновременно о трёх воздействиях: у(τ), g(x) и f(τ), что даёт высокое качество управление по сравнению с предыдущими системами. Одновременно комбинированная САУ даёт возможность повысить точность и быстродействие.
Существенной характеристикой САУ является зависимость между значением управляемого параметра и величиной внешнего воздействия (нагрузкой) на технологический объект управления. По виду зависимости между значением управляемого параметра и нагрузкой САУ делят на статические и астатические (рис.5.31). Зависимость динамической ошибки ε от времени τ для систем в установившемся режиме имеет вид в ε(τ) = х(τ) – у(τ),где х(τ) –сигнал управления;у(τ) –выходной параметр. В зависимости
 от значения εуст = хуст – ууст(ошибка системы) определяют тип системы.
от значения εуст = хуст – ууст(ошибка системы) определяют тип системы.
Рис.5.31.Статические (а) и астатические (б) системы управления
Систему называют статической по отношению к управляющему воздействию если ошибка, как выходные параметры, стремится к постоянному значению, зависящему от значения управляющего воздействия, т.е. статическая система не может обеспечить постоянства параметра при переменной нагрузке.
Систему называют астатической по отношению к управляемому воздействию, если при воздействии, стремящемуся к установившемуся значению, ошибка стремиться к нулю.
 Изменение управляемого параметра, которое вызывает у статической системы перемещение управляемого органа из одного предельного значения в другое, является важной характеристикой этой САУ и называется её неравномерностью. Отношение её величины к номинальному значению управляемого параметра называют статизмом (степень неравномерности).
Изменение управляемого параметра, которое вызывает у статической системы перемещение управляемого органа из одного предельного значения в другое, является важной характеристикой этой САУ и называется её неравномерностью. Отношение её величины к номинальному значению управляемого параметра называют статизмом (степень неравномерности).
Рис.5.32. Статическое (а) и астатическое (б) управление при изменении нагрузки от нуля до максимальной величины.
Если при изменении нагрузки от нуля до номинального значения в статической системе значение управляемого параметра изменилось от nx.x до nном (рис.5.32), то статизмом называется отношение величины изменения управляемого параметра к значению параметра в режиме рабочего хода – s= (nx.x - nном)/ nx.x = 1 - nном/ nx.x. Статическая зависимость управляемых параметров от возмущающих является крайне нежелательной и для её уменьшения или исключения увеличивают коэффициент передачи САУ, применяют принцип управления по возмущению или применяют астатические системы.
При изменении нагрузки на ТОУ или внесении возмущения на САУ последняя приходит в движение. При переходе системы из одного установившегося режима работы в другой она может оказаться либо устойчивой, либо неустойчивой. Чтобы это определить, необходимо исследовать динамику процесса управления, т.е. определить законы изменения управляемых параметров в функции времени при воздействии на САУ возмущающих факторов или управляющих воздействий.
САУ считается устойчивой, если после установления новых значений возмущающих или управляющих воздействий эта система спустя некоторое время может монотонно приблизиться к новому установившемуся значению ууст.2 (рис.5.33, а), или, совершив несколько колебаний нового установившегося значения управляемого параметра ууст.2, приходит к установившемуся режиму работы (рис.5.33, б).Неустойчивая система, придя в движение, не возвращается к установившемуся состоянию равновесия, а возникшее отклонение всё время увеличивается (рис.5.33, в), или непрерывно изменяется в форме постоянных незатухающих колебаний (рис.5.33, г). Частным случаем является САУ, которая совершает незатухающие колебания около нового установившегося значения управляемого параметра (рис.5.33, д).
Таким образом, условие устойчивости САУ состоит в том, что абсолютное значение отклонения управляемых параметров от заданных по истечению переходного периода должно стать меньше некоторого установленного наперёд значения.
Устойчивость САУ является основным, но недостаточным условием, Поэтому не всякую устойчивую САУ можно применять для данного конкретного случая. Так, затухание переходного процесса (рис.5.34) может происходить при прочих равных условиях быстрее (Т1) или медленнее (Т2) с большими δ1 или меньшими δ2 отклонениями управляемого параметра от заданного значения.
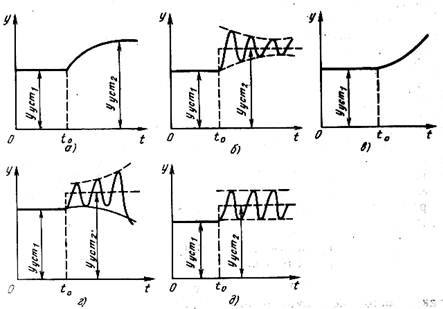
 Рис.5.33. Виды переходных процессов: а, б – устойчивая САУ; в, г –неустойчивая САУ; д – консервативная САУ
Рис.5.33. Виды переходных процессов: а, б – устойчивая САУ; в, г –неустойчивая САУ; д – консервативная САУ
Переходный процесс может быть апериодическим или колебательным. Характеристиками качества управления ТОУ являются степень поддержания управляемых параметров, когда на САУ не воздействуют внешние возмущающие факторы, и вид переходных процессов, возникающих при воздействии внешних возмущающих факторов.
Системы управления производственными процессами – это информационные системы, обеспечивающие наилучшее, оптимальное (в данном понимании) функционирование сложных ТОУ при их комплексной автоматизации. При этом характеристики ТОУ и возмущающие воздействия могут изменяться непредвиденным образом, но при определённых ограничениях.
Наилучшее функционирование системы характеризуются так называемым критерием оптимального управления (оптимальности), который представляет собой числовую величину, определяющую эффективность достижения цели управления и зависящую от изменения во времени (или пространства) координат и параметров ТОУ. Этими критериями оптимальности могут быть различные технические и экономические показатели функционирования системы: производительность, себестоимость продукции, к.п.д., быстродействие, среднее отклонение какого-либо параметра от заданного, отдельные показатели качества продукции либо синтетический показатель и т.п. Критерий оптимальности может относится как к переходному, так и к установившемуся процессам
Различают регулярный и статистический критерии оптимальности. Первый зависит от регулярных параметров и координат управляемой и управляющей систем. Второй применяется, когда имеются входные сигналы в виде случайных функций или (и) нужно учесть случайные возмущения, порождённые отдельными элементами системы.
По своему математическому описанию критерий оптимальности может быть:
· функцией конечного числа параметров и координат управляемого процесса F(T1, T2,…, k1, k2,…, φ1, φ2,…), которая принимает экстремальные значения при оптимальном функционировании системы. В этом случае решение задачи сводится к отысканию (чаще всего методом пробных движений) экстремальной точки; полученная система экстремального регулирования является частным случаем (и самым распространённым) оптимального управления;
· некоторым функционалам I(ρ), где функции ρ(t, ρ1, ρ2,…) описывают закон управления (координаты регулирующего органа). Определяется такой вид этой функции, при котором I(ρ) примет экстремальное значение по сравнению с его величиной при любом другом виде функции ρ(t, ρ1, ρ2,…), в то время как сохраняются постоянные граничные значения аргументов этой функции, т.е получаем вариационную задачу. Однако решение её обычно затруднено или даже неосуществимо из-за ограничений, накладываемых как на параметры системы, так и на координаты процесса, т.е. ограничений, возникающих при конструировании и эксплуатации системы. Во-первых, ряд параметров ограничен сверху (иногда и снизу) условиям прочности, надёжности, зонами насыщения и многими конструктивными факторами. Это относится, в частности, к движущим и тормозящим моментам, ускорениям, температурам и т.д. Во-вторых, при эксплуатации системы часто не допускается превышение некоторого порога перерегулирования, амплитуды и частоты колебательных процессов для регулируемого параметра, скоростей, инерционных сил и т.п. Кроме того, для оптимальных систем часто нужно отыскивать не экстремальные значения функционала, а простые наибольшие или наименьшие значения функционала, а простые наибольшие или наименьшие значения (на границе области аргументов) либо двухсторонние экстремумы неаналитического типа (при разрыве непрерывности).
Для расчёта оптимальных систем автоматического управления пользуются специальными методами: принципом максимума Л.С. Понтрягина (чаще всего) или теорией динамического программирования.
Рассмотрим применение принципа максимума к анализу оптимальной САУ. Представим ТОУ в виде сочетания ( по эквивалентной передаточной функции) звеньев первого порядка с n выходными координатами (они могут быть взаимозависящими) φi(i =1, 2,…n и r управляющими (регулирующими) входными воздействиями ρq(q = 1, 2,…,r); иначе говоря, рассматриваем r – мерную систему автоматического управления. В общем случае для каждой координаты φi можно составить уравнение функциональной связи скорости её изменения в зависимости от всех координат φi и всех управляющих воздействий ρq:
dφi/dτ = Fi(φ1, φ2,…, φn, ρ1, ρ2,…, ρr), i = 1, 2,…, n.
Таких уравнений можно написать n, но удобнее всю систему описать одним векторным уравнением
dФ/dτ = F(Ф, R),
где Ф – вектор в n – мерном пространстве с компонентами φ1, φ2,…, φn; R-вектор r-мерном пространстве с компонентами ρ1, ρ2,…, ρr; F(Ф, R) – вектор в n-мерном пространстве с компонентами F1(Ф, R), F2(Ф, R),…, Fn(Ф, R).
Поскольку практически сигналы управления ρq всегда ограничены по своим значениям (ρq < ρмакс), у вектора Rмакс в любой момент времени компоненты также ограничены значениями Ri макс. Поэтому сам вектор Rмакс выделяет в r- мерном пространстве некоторую ограниченную замкнутую область (многогранник), называемую областью управления. Естественно. Что в общем случае все компоненты ρq являются функциями времени. Следовательно, и вектор Rмакс в r-мерном пространстве также перемещается со временем и характеризует предельную область управления. В её границах должен укладываться, очевидно вектор R (образующий допустимую область управления) при всех возможных сочетаниях ρq и на протяжении всего времени τo < τ < τ, где τо и τ1 – начало и конец рабочего интервала.
Все функции Fi(Ф, R) предполагаются непрерывными функциями от всех n аргументов φi (и непрерывно дифференцируемыми по этим аргументам).
Для решении задачи о оптимальном управлении рассматриваемой системой нужно определить все r управляющих воздействий:
ρq = ρq (φ1, φ2,…, φn; ρ1, ρ2,…, ρq+1, ρq-1,…, ρr).
В общем случае каждая из этих координат ρq зависит от всех выходных координат φi и остальных (r-1) управляющих воздействий. В векторной форме все r уравнений для ρq можно написать в следующем виде:
σ(Ф, R) = 0,
где σ(Ф, R) в r-мерном пространстве имеет r компонент σq(Ф, R).
Допустим, что изображающая точка системы в n-мерном фазовом пространстве из начального положения с координатами φ10, φ20,…, φn0, т.е. описываемого вектором Ф0, перемещается в положение Ф1 с компонентами φ11, φ21,…, φn1. Чтобы найти вектор-функцию управления R(τ), обеспечивающую требуемый критерий оптимальности, задаются определённой функцией
F0(Ф, R) = F0(φ1, φ2,…, φn, ρ1, ρ2,…, ρr)
и ищут экстремальное значение функционала  .
.
 Полученное при этом значение R(τ) и явится оптимальным управлением.
Полученное при этом значение R(τ) и явится оптимальным управлением.
Рис.5.35.Элементная схема САУ: ОУ (ТОУ) –объект управления; Р – регулятор; УОП - устройство оценки параметров процесса; УОВВ – устройство оценки параметров внешних воздействий; ЛЭ – логический элемент; ИЭ – исполнительный элемент
Чтобы обеспечить оптимальность функционирования сложных ТОУ, применяемые САУ должны быть самоприспосабливающимися (адаптивными), т.е. обладать способностью автоматически изменять в процессе своего функционирования алгоритм управления, характеристики или структура регулирующей системы в направлении сохранения неизменным критерия совершенства системы или произвольно изменяющихся параметрах ТОУ и внешних условиях его работы (в частности, возмущениях). Отсюда следует, что в общем случае подобная система состоит из двух частей: постоянной (неизменной), включающей ТОУ и некоторые элементы управляющей системы, и переменной (изменяемой), включающей остальные элементы управляющей системы.
Чтобы осуществить целенаправленное изменение алгоритма, характеристики или структуры, самоприспосабливающаяся система должна обязательство иметь в своём составе контролирую (информационную) и исполнительную части. Первая получает перерабатывает, хранит и выдаёт рабочую информацию о параметрах ТОУ и внешних условиях его работы. Вторая часть на основе этой информации вырабатывает требующееся воздействие на изменяемую часть.
Соответственно этому строится САУ (рис.5.35): основной контур автоматического управления (регулирования) I и контур адаптации II, вырабатывающий управляющие сигналы для целенаправленного изменения способа функционирования основного контура. Для нормальной работы контур адаптации получает необходимую информацию о всех координатах основного контура регулирования и, если нужно, то и результаты измерения возмущений и помех. При подобной структуре выход из строя контура адаптации не лишит систему работоспособности; она сможет функционировать как обыкновенная (без самоприспособления) САУ.
Контур адаптации функционирует, как правило, в более медленном темпе, чем основной контур САУ, и обязательно содержит запоминающее устройство, накапливающее информацию о функционировании системы в течении определённого времени, необходимого для суждения о качестве её функционирования.
В зависимости от вида контура адаптации, т.е. от характера процессов, различают системы жёсткой адаптации и системы регулируемой адаптации, называемые самонастраивающимися системами. И системе жёсткой адаптации характер зависимости сигналов контура адаптации для управления основного контура управления (регулирования) заранее жёстко определён, т.е. цепь адаптации разомкнута. В самонастраивающейся системе, наоборот, цепь адаптации замкнута, причём возможны две основные модификации: замкнутая цепь адаптации представляет собой САУ по отклонению либо систему автоматического поиска. Кроме того, имеются и комбинированные системы управления, в которых совмещаются методы как жёсткой адаптации, так и самонастройки.
Для самоприспосабливающихся САУ характерно их поведение в переходном и установившемся процессах адаптации. При этом различают три основных вида процессов.
1.Переходные процессы адаптации; в частности, при постоянстве характеристик ТОУ и возмущений, приложенных к управляющей системе, критерий качества постепенно приближается к оптимальному значению благодаря целенаправленному изменению алгоритма управления. Подобные системы называются системами автоматического обучения, которые в свою очередь делятся также на три группы: самообучающиеся системы, обучаемые системы и обучающие адаптивные системы.
2.Установившиеся процессы адаптации; при медленных изменениях характеристик как ТОУ, так и действующих на него возмущений и, кроме того, отсутствии возмущений, приложенных непосредственно изменяется для поддержания оптимального значения критерия качества. Подобные системы называется системами стабилизирующей адаптации (системами автоматического гомеостаза).
3.Процессы адаптации при непредвиденных изменениях управляющей системы; здесь должна сохраняться работоспособность системы управления (в смысле поддержания оптимального режима либо постоянного приближения к нему) при непредвиденных нарушениях, повреждениях и выходе из строя части управляющей системы. Иначе говоря, в данном случае придаётся большое значение высокой надёжности управляющей системы, связанной с компенсацией повреждений, заменой отказавших элементов, созданием новых связей и т.п. Подобные системы называются самоорганизующимися.
Для классификации САУ можно использовать основные четыре признака: 1)исходное условие адаптации; 2)средства её достижения (реализации); 3)способ оценки характеристик системы; 4)стратегия реализации регулирующего воздействия.
Исходные условия (задач) адаптации чаще всего также четырёх (основных) видов: 1)обеспечивающие оптимальные динамические свойства самой (импульсной, переходной, частотной, передаточной функции и т.д.); 2)сохраняющие экстремальное состояние системы; 3)создающие нечувствительность её параметров к внешним возмущениям, т.е. инвариантность системы (полная или частичная компенсация); 4)обеспечивающие заданное самоограничение по запасу устойчивости, перегрузкам и другим критериям.
Для реализации указанных задач самоприспосабливания используются различные технические способы (раздельно либо совместно): 1)изменение настройки управляющих устройств (регулятора); 2)изменение алгоритма управления (регулирования); 3)изменение структуры управляющего устройства (регулятора); 4)изменение типа нелинейностей управляющего устройства (регулятора); 5)изменение параметров системы; 6)применение корректирующих устройств; 7)применение цифровых вычислительных машин и моделей.
Изменение настройки управляющего устройства (УУ) осуществляется также, как и в следящих системах.
Изменение алгоритма управления (регулирования) осуществляется по команде контура адаптации.
Структура УУ (регулятора) изменяется путём переключения по заранее подготовленным схемам. Чаще всего при этом включаются либо отключаются, либо меняют своё направление дополнительные местные связи (например, звено охватывается обратной или отрицательной связью, включается дифференцирующее звено и т.п.) по команде контура адаптации.
Изменение типа нелинейностей регулятора является также простым и широко распространённым способом адаптации. Оно осуществляется путём изменения какой-либо характеристики нелинейного звена УУ (например, зоны нечувствительности, зоны насыщения и т.п.) либо заменой одного нелинейного звена другим (путём переключения).
Изменение параметров системы чаще осуществляется изменение коэффициентов усиления и реже – постоянных времени звеньев САУ. Выполняется этот способ адаптации обычно посредством переключения (например, охватом звеньев жёсткими или гибкими обратными связями) по заранее подготовленной схеме коммутации.
Применение корректирующих устройств осуществляется в двух основных модификациях: с разомкнутой и замкнутыми цепями. Корректирующие устройства с разомкнутыми цепями менее точны по результатам работы – они решают задачу сохранения постоянства передаточной функции замкнутой системы. При этом компенсируются изменения (в процессе функционирования) некоторых составных частей общей передаточной функции системы путём автоматического изменения других составных частей этой передаточной функции исходя из постоянства передаточной функции системы в разомкнутом состоянии. Корректирующие устройства с замкнутой цепью работают точнее, однако они сложнее, дороже и часто требуют специальных средств стабилизации. Особенно часто подобные корректирующие устройства применяются для экстремальных систем.
Применение ЭВМ и моделей позволяет вычислить либо определить на модели ТОУ требуемую адаптацию без вмешательства в рабочий процесс, без нарушения условий его работы и без создания поисковых возмущений.
Существуют два способа основных способа оценки характеристик системы: с использованием либо одних рабочих сигналов нормального функционирования, либо совместных рабочих и пробных сигналов. В первом случае используются статистические соотношения между случайными процессами на входе и выходе объекта или системы, в частности связь взаимной корреляционной функции этих процессов с импульсной переходной и передаточной функциями. Естественно, что этот путь рационально применять для ТОУ, подверженных действию случайных возмущений типа стационарного случайного процесса. Во втором случае создаются пробные возмущения наиболее удобной формы: синусоидальные, прямоугольные, импульсные разного характера и т.п.
Во всех случаях способы оценки характеристик системы должны обладать таким быстродействием, чтобы контролируемые параметры не успевали существенно измениться за время процесса. Объём информации, выдаваемой системой оценки, может быть полным (определяются исчерпывающие характеристики, передаточная или частотная функция и т.п.) либо частичным (находится лишь некоторые точки для указанных характеристик или определяются отдельные отрывочные показатели). При этом описывается система в целом или один объект управления.
Реакция системы на единичное ступенчатое воздействие  при н
при н улевых начальных условиях называется переходной характеристикой системы (рис.5.36).
улевых начальных условиях называется переходной характеристикой системы (рис.5.36).
Приведём основные параметры переходной характеристики:
¨ время управления Ту (время переходного процесса) – минимальное время, по истечению которого выходная величина будет оставаться близкой к установившемуся значению с заданной точностью:  ;
;
¨ перерегулирование  %, определяется выражением
%, определяется выражением  в реальных системах оно равно 10-30%, в некоторых случаях допускается до 70%.
в реальных системах оно равно 10-30%, в некоторых случаях допускается до 70%.
¨ статическое отклонение  ;
;
¨ частота колебаний процесса  , где Т – период колебаний;
, где Т – период колебаний;
¨ время установления  - абсцисса точки пересечения с уровнем установившегося значения
- абсцисса точки пересечения с уровнем установившегося значения  (иногда называют временем нарастания);
(иногда называют временем нарастания);
¨ декремент затухания  ;
;
¨ число колебаний n (число максимумов  ).
).
Дополнительный материал. Классификация автоматических систем по характеру внутренних динамических процессов.
Основными признаками деления автоматических систем на большие классы по характеру внутренних динамических процессов являются следующие:
§ непрерывность или дискретность (импульсные и цифровые) динамических систем во времени;
§  линейность или нелинейность уравнений, описывающих динамику процессов действия.
линейность или нелинейность уравнений, описывающих динамику процессов действия.
§
На рис.5.37 показан регулятор уровня воды в котле паровой машины. Измерительное устройство (поплавок), измеряющее управляемую величину (высоту уровня воды в котле), непосредственно перемещает управляющий орган (клапан питания котла водой). Котёл является управляемым объектом.
На рис.5.38 показана система управления стабилизацией температуры объекта охлаждаемого воздухом с помощью управляющего органа - шторок, угловое положение которых φ определяет интенсивность поступления охлаждаемого воздуха.
Измерительное устройство состоит из терморезистора 1, включённого в качестве одного из плеч моста 2, и гальванометра 3, измеряющего ток в диагонали моста.
 Примеры дискретной и нелинейной САУ приведены на рис.5.39 и 5.40
Примеры дискретной и нелинейной САУ приведены на рис.5.39 и 5.40
Р ис.5.40. Пример нелинейной системы управления с нелинейным логическим устройством
ис.5.40. Пример нелинейной системы управления с нелинейным логическим устройством
Линейной импульсной системной называется такая САУ, которая кроме звеньев, описываемых линейными дифференциальными уравнениями, содержит импульсный элемент, преобразующий непрерывное входное воздействие в последовательность импульсов (рис.5.41, а).
Р ис. 5.41.Линейная импульсная САУ
ис. 5.41.Линейная импульсная САУ
В общем случае можно изобразить обобщённую структурную схему импульсной системы так, как показано на рис. 5.41, б, где все непрерывные звенья сведены в один блок – непрерывная часть системы НЧ.
Импульсный элемент может представлять собой самостоятельное функциональное устройство или являться составной частью цифро – аналоговых преобразователей, входящих в систему управления с цифровыми управляющими машинами.
В процессе преобразование непрерывного сигнала в дискретный импульсный элемент (рис. 5.42, а) выполняет две операции: квантование по времени и импульсную модуляцию.
Наиболее распространёнными в настоящее время видами импульсной модуляции являются амплитудно – импульсная (АИМ) и широтно – импульсная (ШИМ). Причём АИМ является линейным звеном.
Импульсная система устойчива, если все корни её характеристического уравнения лежат внутри круга единичного радиуса (рис.5.42)
Система находится на границе устойчивости если, хотя бы один корень находится на окружности, а остальные внутри её (рис. 5.42, в); при нахождении на границе окружности пары корней она находится в колебательном режиме (рис. 5.42, г).
Цифровые системы.ЦВМ вводить в систему управления в тех случаях, когда для решения задач управления требуется сложная обработка информации или выполнение таких операций, которые не могут быть осуществлены с требуемой точностью при помощи аналоговых средств (умножение, деление, преобразование координат и т.п.).
Вместе с тем в ряде случаев вполне оправданной оказывается цифровая реализация линейных корректирующих средств, которые обычно выполняются с использованием R-, L-, C- элементов. Это связано с тем, что характеристики таких элементов изменяются с течением времени и под влиянием внешних факторов, а их надёжность сравнительно невысока.
Помимо непосредственного участия в управлении объектом ЦВМ может выполнять такие операции, как контроль состояния элементов и устройства системы, самоконтроль и др. Одним из вариантов функциональной схемы цифровой системы автоматического управления при наличии двух каналов показана на рис. 5.43.
 Рис.5.43.Цифровая система
Рис.5.43.Цифровая система
ЦВМ может оперировать как цифровыми датчиками ЦД, так и с аналоговыми Д, а также, как правило, с аналоговыми исполнительными механизмами ИМ.
ЦВМ формирует требуемый алгоритм управления или осуществляет дискретную коррекцию в виде вычислительной процедуры, задаваемой линейным разностным уравнением и передаточной функцией на основе  - преобразований типа:
- преобразований типа:
 .
.
Синтез систем управления с ЦВМ наиболее просто на основе непрерывных систем.
Нелинейные САУ.Нелинейной системой автоматического управления называется такая система, которая содержит хотя бы одно звено, описываемое нелинейным уравнением:
v релейное;
v с кусочно – линейной характеристикой;
v с производными переменных или их производных;
v нелинейное импульсное;
v логическое;
v описываемое кусочно – линейными дифференциальными уравнениями.
Различают статические и динамические нелинейности. Первые описываются нелинейными алгебраическими уравнениями, а вторые представляются в виде нелинейных дифференциальных уравнений.



 На рис.5.44-5.47 показаны характеристики ряда нелинейных систем с их фазовыми траекториями.
На рис.5.44-5.47 показаны характеристики ряда нелинейных систем с их фазовыми траекториями.
Контрольные вопросы.
1.Каковы основные составляющие обобщённой САУ?
2.Что такое понятие «управление» по А.И. Бергу?
3.Что такое понятие «регулирование»?
4.Что такое понятие «организация производства»?
5.В чём отличие систем управления по возмущению и по отклонению?
6.В чём отличие астатических и статических САУ?
8.Что такое качество управления?