Прокомментируйте структурные схемы САР по отклонению и возмущению. Их достоинства и недостатки.
Рис.5.28.
Рис.5.27.
Рис.5.25.
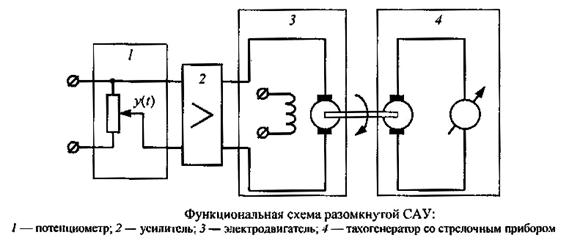
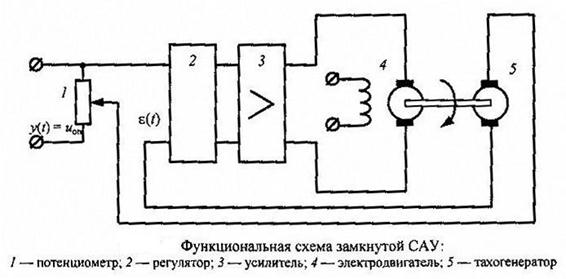
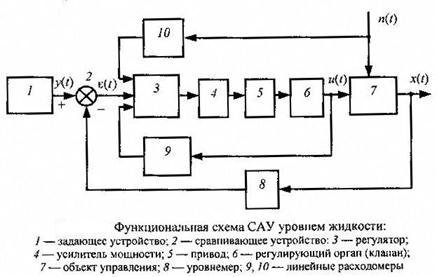
Рис.5.23. Функциональные схемы САУ
Таблица 5.1
Рис.5.18.Примеры импульсной модуляции
Если в структуре САР (САУ) имеется хотя бы один элемент с релейной характеристикой, то такая система называется релейной. Примеры релейных характеристик типа ДА-НЕТ показаны на рис.5.17: а – без зоны нечувствительности; б – с зоной нечувствительности ∆; в – с зоной нечувствительности ∆ и гистерезисом h, причём М – величина уровня ограничения. Особенностью всех характеристик является независимость выходной величины х2 от величины входного сигнала х1. Знак выходного сигнала релейного определяется знаком входного сигнала.
В технике автоматического регулирования широко применяются импульсные системы, которые отличаются тем, что в них для передачи сигнала используется один из видов импульсной модуляции, показанной на рис.5.18. С помощью специального устройства, называемого импульсным элементом, непрерывный сигнал  , например вида кривой показанной на рис.5.18, а, квантуется по времени. При этом различают амплитудно-импульсную модуляцию (АИМ, рис.5.18, б), широтно-импульсную модуляцию (ШИМ, рис.518, в) и частотно-импульсную модуляцию (ЧИМ, рис.5.18, г). В случае амплитудно-импульсной модуляции сигнал на выходе импульсного элемента представляет собой последовательность импульсов одной и той же длительности
, например вида кривой показанной на рис.5.18, а, квантуется по времени. При этом различают амплитудно-импульсную модуляцию (АИМ, рис.5.18, б), широтно-импульсную модуляцию (ШИМ, рис.518, в) и частотно-импульсную модуляцию (ЧИМ, рис.5.18, г). В случае амплитудно-импульсной модуляции сигнал на выходе импульсного элемента представляет собой последовательность импульсов одной и той же длительности  , с периодом повторения
, с периодом повторения  и переменной амплитудой, определяемой мгновенным значением квантуемого сигнала (штриховая линия) в моменты квантования
и переменной амплитудой, определяемой мгновенным значением квантуемого сигнала (штриховая линия) в моменты квантования  и т.д. Применение широтно-импульсной модуляции даёт выходной сигнал импульсного элемента в виде последовательности одинаковой амплитуды, с периодом повторения и различной шириной импульсов
и т.д. Применение широтно-импульсной модуляции даёт выходной сигнал импульсного элемента в виде последовательности одинаковой амплитуды, с периодом повторения и различной шириной импульсов  , которая определяется величиной квантуемого сигнала в моменту квантования. При частотно-импульсной модуляции изменяется частота импульсов в соответствии с величиной входного сигнала импульсного элемента в моменты съёма информации. Амплитуда и длительность импульсов постоянны.
, которая определяется величиной квантуемого сигнала в моменту квантования. При частотно-импульсной модуляции изменяется частота импульсов в соответствии с величиной входного сигнала импульсного элемента в моменты съёма информации. Амплитуда и длительность импульсов постоянны.
Принципы построения систем регулирования температуры и мощности в печах сопротивления. Используемые в печах сопротивления системы регулирования температуры и мощности можно разделить на две группы:
Рис.5.19.Структурная схема САР температуры и мощности электропечей сопротивления: а – системы регулирования температуры (позиционные, непрерывные или импульсные общепромышленного назначения); б – прецизионные системы регулирования температуры (непрерывные); в – системы регулирования мощности (непрерывные) общепромышленного назначения; г – прецизионные системы регулирования мощности (непрерывные)
1.Системы регулирования температуры (мощности) для печей сопротивления общего назначения, в том числе лабораторных.
2.Системы регулирования температуры (мощности) для прецизионных печей сопротивления.
В свою очередь первая группа имеет модификации систем, осуществляющих релейное, непрерывное и импульсное (квазинепрерывное) регулирование.
Прецизионные печи сопротивления, как правило, оснащаются только непрерывными системами регулирования.
На рис.5.19 приведены структурные схемы САР температуры и мощностию
Структурно системы состоят из задатчика сигнала, пропорционального температуре или мощности ЗТ, органа сравнения ОС, устройств: измерительного ИУ, регулирующего РУ, Исп.У, программного ПУ и датчика температуры ДТ или мощности ДМ.
В регуляторах общего назначения ЗТ, ОС, ИУ и РУ (позиционных, импульсных) совмещены в одном приборе, например в компенсаторах типа КСП или милливольтметрах. В непрерывных системах регулирования в качестве регулирующего устройства РУ используется бесконтактное аналоговое устройство.
В прецизионных системах для обеспечения высокой чувствительности измерительные устройства выполняются узкопредельными на диапазон отклонения температуры в пределах +(125-500) мкВ, что составляет, например, по термопаре ТХА + (3-12,5)оС. В связи с этим задатчики одновременно являются подавителями ТЭДС и выполнены в виде отдельных блоков.
Состав регуляторов температуры и мощности для общепромышленных и прецизионных печей идентичен, отличие состоит лишь в том, что регулятор температуры используется в комплекте с датчиком температуры (рис.5.20, а, б), а регулятор мощности – в комплекте с датчиком мощности (рис.5.20, в, г).
При программном регулировании общепромышленных печей сопротивления программное устройство включается между измерительным и регулирующим устройством; в системах регулирования прецизионных печей программное устройство, в состав которого входят программируемый задатчик (подавитель) и блок программного управления, включается вместо обычного задатчика.
Двухпозиционный регулятор имеет существенно нелинейную связь между входной (температура датчика) и выходной (мощности печи) величинами (рис.5.21, а). Выходная величина изменяется скачком от Р1до Р2 или обратно или обратно всякий раз, когда входная величина проходит пороговые значения  , где
, где  - так называемый гистерезис.
- так называемый гистерезис.
Относительное время включения регулятора или скважность (рис.5.21) равно:  . Качество позиционного регулирования (рис.5.21) характеризуется такими параметрами, как амплитуда колебаний А , частота колебаний
. Качество позиционного регулирования (рис.5.21) характеризуется такими параметрами, как амплитуда колебаний А , частота колебаний
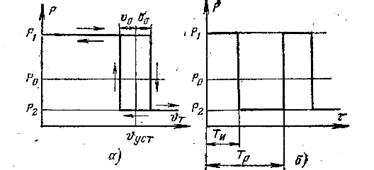
Рис.5.20.Характеристика двухпозиционного регулятора: а – характеристика «выход – вход» (Ро – средняя или потребляемая мощность печи; Р1, Р2 – соответственно максимальная и минимальная подводимые мощности; - установка регулятора;
- установка регулятора; - гистерезис
- гистерезис
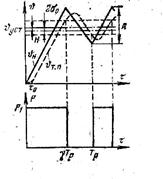
Рис.5.21.Процесс двухпозиционного регулирования температуры с учётом динамического запаздывания: - температура нагревателей печи;
- температура нагревателей печи; - температура рабочего спая регулирующей термопары;
- температура рабочего спая регулирующей термопары; - запаздывание термопары
- запаздывание термопары
 и нестабильность Н поддержания температурного уровня. Эти параметры зависят от гистерезиса регулятора, избытка установленной мощности над потребляемой
и нестабильность Н поддержания температурного уровня. Эти параметры зависят от гистерезиса регулятора, избытка установленной мощности над потребляемой  и динамических характеристик печи и датчика.
и динамических характеристик печи и датчика.
Уменьшение гистерезиса, увеличение избытка мощности печи, уменьшение инерции и запаздывания термопары способствуют увеличению  и соответственному уменьшению А.
и соответственному уменьшению А.
Увеличение инерционности печи при прочих равных условиях приводит к уменьшению А, несмотря на то, что при этом также уменьшается . Это объясняется тем, что в данном случае на А решающее влияние оказывает уменьшение скорости изменения температуры, связанное с увеличением инерционности печи.
Средняя температура, поддерживаемая двухпозиционным регулятором, равна уставке регулятора  только при условии Р1= 2Ро; в остальных случаях происходит смещение значений этой величины относительно уставки, т.е. появляется нестабильность Н. При отсутствии возмущений Н остаётся постоянной и температура в печи может быть скорректирована уставкой регулятора.
только при условии Р1= 2Ро; в остальных случаях происходит смещение значений этой величины относительно уставки, т.е. появляется нестабильность Н. При отсутствии возмущений Н остаётся постоянной и температура в печи может быть скорректирована уставкой регулятора.
Для улучшения качества позиционного регулирования необходимо стремиться к снижению запаздывания и инерционности датчика. Если это не удаётся, то необходимо уменьшить скорость нарастания температуры в печи путём уменьшения избытка мощности и утяжеления самой печи. Однако следует учитывать, что последнее ухудшает управляемость печи.
Регуляторы непрерывного действия имеет непрерывную функциональную связь между выходной и входной величинами. В соответствии с законами регулирования они подразделяются на следующие типы: пропорционального (П), интегрального (И), пропорционально – интегрального (ПИ), пропорционально – интегрально – дифференциального (ПИД) действия.
В регуляторах непрерывного действия предусмотрена настройка величин: коэффициента усиления Кр; времени интегрального Ти и время дифференциального ТД воздействия. Динамические характеристики каждого из воздействий (П, И и Д) в виде переходных и частотных характеристик приведены в табл.5.1. Показатели качества непрерывных систем с П -
регулирования характеризуются статизмом  , где
, где  - остаточное отклонение значений регулируемой величины от заданного значения,
- остаточное отклонение значений регулируемой величины от заданного значения,  .
.
Импульсные (квазинепрерывные) регуляторы в одной из своих модификаций, используемых в печах сопротивления, представляют собой позиционные регуляторы, охваченные от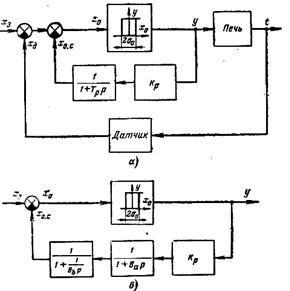 рицательной обратной связью (рис.5.22).
рицательной обратной связью (рис.5.22).
Рис.5.22.Квазинепрерывный регулятор (позиционный) регулятор, охваченный отрицательной обратной связью): а – ПД; б – ПИД – законы регулирования
В зависимости от структуры обратной связи такие регуляторы могут по аналогии с непрерывными обеспечить ПД- и ПИД - законы регулирования; при этом передаточные функции обратных связей имеют вид:
для ПД - закона  ;
;
для ПИД – закона  ,
,
где  - коэффициент передачи обратной связи.
- коэффициент передачи обратной связи.
Для обратной связи по рис.3.18, б 
 ;
;
 , где
, где  - постоянные времени звеньев.
- постоянные времени звеньев.
У импульсных регуляторов в отличие от непрерывных изменение выходного параметра носит импульсный характер и по аналогии с позиционными изменениями мощности, подводимой к печи, пропорционально скважности регулирования:  . В отличие от позиционных, эти регуляторы могут обеспечить существенно более высокую частоту переключений f (Гц), определяемую параметрами обратной связи.
. В отличие от позиционных, эти регуляторы могут обеспечить существенно более высокую частоту переключений f (Гц), определяемую параметрами обратной связи.
Для случая 
 , где
, где  - постоянная времени обратной связи, с;
- постоянная времени обратной связи, с;  =
=  - диапазон пропорциональности.
- диапазон пропорциональности.
Качество регулирования при использовании импульсных регуляторов определяется показателями, присущими для непрерывных регуляторов, так таким параметром, как дополнительные колебания температуры, амплитуда которых зависит от частоты импульсов модуляции мощности и динамической характеристики печи.
На рис.5.23 показаны разомкнутая и замкнутая схемы управления числом оборотов электродвигателя.
Отличительной чертой последней рассмотренной САУ является поступление на вход системы называемой «обратной информацией», которая необходима для контроля (обратная связь). ОС замыкает канал управления (поэтому такое управление называют замкнутым).
Таким образом, при управлении с РС значение управляющей переменной постоянно сопоставляется с её заданным значением (эталонным) значением. Цель управления – сделать эти величины близкими (в известном смысле) несмотря на различные помехи.
Контур управления – это система, состоящая из объекта управления и регулятора (управляющей системы, с помощью которой добиваются нужного качества управления). К основным функциям контура управления относятся: измерение, сравнение и реагирование (выработка команды управления на объект), которые должны, по возможности, выполняться, в известном смысле, оптимально; в этом случае контур управления, несмотря на помехи, постоянно поддерживает управляемую переменную близкой к её заданному значению.
В этом случае, системой автоматического управления называется активная динамическая система, стремящаяся сохранить в допустимых пределах отклонение между требуемым и действительным изменениями переменной при помощи их сравнения на основе принципа обратной связи (замкнутого цикла) и использования получающегося при этом сигнала для управления источником энергии.
При введении отрицательной обратной связи система слабо реагирует на возмущающие воздействия и подчиняется главным образом управляющему воздействию, т.е. замкнутая система управления по существу является фильтром, который достаточно точно воспроизводит управляющее воздействие и подавляет возмущение.
 Динамические характеристики П, И и Д воздействий
Динамические характеристики П, И и Д воздействий
Сигнал, который поступает с выхода системы на её вход, называют сигналом главной обратной связи, а разность между входным сигналом и сигналом главной обратной связи – сигналом ошибки.
САУ являются системами направленного действия. Это означает, что выходной сигнал последующего элемента может оказать влияние на формирование ошибки на выходе элемента сравнения только через обратную связь.
На рис.5.24 показаны статическая (а) и астатическая (б) САУ уровня жидкости.
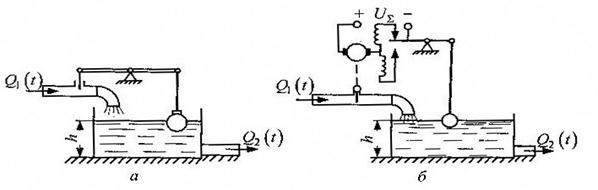
Рис. 5.24.Статическая (а) и астатическая (б) САУ уровня жидкости
Характерные особенности статической системы управления следующие:
o равновесие системы имеет место при различных значениях управляемой величины;
o каждому значению управляемой величины соответствует единственное определённое положение регулирующего элемента;
o контур регулирования системы должен состоять из статических звеньев, осуществляющих зависимость  .
.
Характерные особенности астатической системы управления следующие:
o равновесие системы имеет место при единственном значении управляемой величины, равном заданному;
o регулирующий элемент должен иметь возможность занимать различные положения при одном и том же значении управляемой величины.
Следует различать системы статические и астатические по отношению к возмущающему и управляющему воздействиям.
На рис. 5.25 приведены кривые переходных процессов в статической и астатиче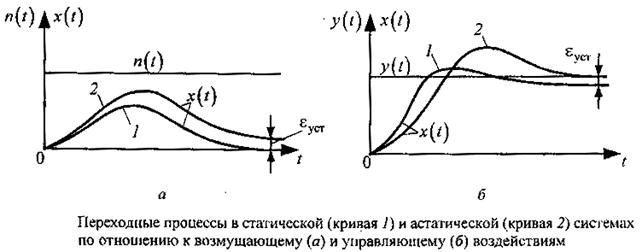 ской системах по отношению к возмущению (а) и управляющему (б) воздействиям.
ской системах по отношению к возмущению (а) и управляющему (б) воздействиям.
На рис.5.26 показана принципиальная схема автоматического точного регулирования уровня жидкости в резервуаре, а на рис. её функциональное изображени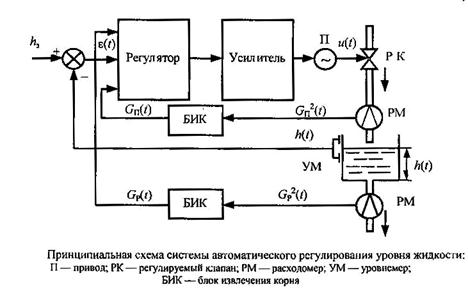 е.
е.
Рис. 5.26.
На рис.5.28 представлена программная система автоматического управления темпера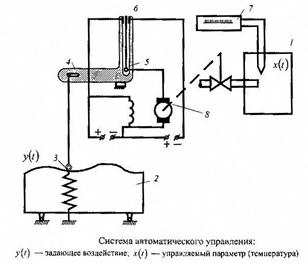 турой в печи.
турой в печи.
Контрольные вопросы.
1.Какие классы САУ существуют в промышленных условиях?
2.Какие классификационные признаки САУ Вы можете привести?
3.Как классифицируются САУ по характеру функционирования алгоритма управления?
4.Как классифицируются САУ по характеру алгоритма управления?
5.Как классифицируются САУ по способности самоприспособления?
6.Как классифицируются САУ по характеру управляющего воздействия?