ЛЕКЦИЯ.
Классификация роботов
Лекция 3. Классификация словосочетаний.
План.
1. Классификация словосочетаний по главному слову.
2. Типы связей в словосочетаниях.
3. Простые и сложные словосочетания.
4. Цельные словосочетания.
Словосочетания классифицируются по разным основаниям. Прежде всего выделяют несколько групп словосочетаний в зависимости от того, к какой части речи принадлежит главное слово. Выделяют именныесловосочетания, которые делятся на (1) субстантивные с главным словом именем существительным, при этом отношения между компонентами могут быть самыми разными. Например: частная собственность (атрибутивные отношения), дом у дороги (атрибутивно-объектные), подвиг разведчика (субъектные/атрибутивные), покупка книги (объектные). Это наиболее продуктивная группа словосочетаний. (2) адъективные с главным словом - именем прилагательным: трудный для запоминания (объектные), необходимый всем (объектные), чертовски привлекательный (обстоятельственные). Многие адъективные словосочетания синонимичны глагольным словосочетаниям. Сравните: гордиться победой / гордый победой, краснеть от смущения / красный от смущения. (3) словосочетания с именем числительным в качестве главного слова: три яблока, двое друзей. В этих словосочетаниях реализуются комплетивные отношения. Они являются одним членом предложения.
Выделяют также местоименные словосочетания, в которых в роли главного слова выступает местоимение: кто-то в малиновом берете, каждый из нас, что-то странное, любой из присутствующих. Не все местоимения способны образовывать словосочетания, а только те, которые можно конкретизировать. Это или неопределенные местоимения, или определительные.
Глагольными называют словосочетания, у которых главное слово является глаголом: бежать наперегонки, слушать команду, догонять всех, хотеть путешествовать, любить людей. К глагольным мы будем относить и словосочетания с причастием и деепричастием в роли главных слов.
Наречные (адвербиальные) словосочетания – это словосочетания с наречием в роли главного слова: почти весело, очень тихо, слишком рано, немного по-барски, несколько необычно. Не являются словосочетаниями: более грубо, менее тихо, труднее всего. К наречным приближаются словосочетания с категорией состояния в роли главного слова: больно руку, холодно в лесу, очень холодно, невесело с вами.
Словосочетания классифицируются также по типам подчинительной связи. Выделяют следующие типы подчинительной связи – согласование, управление, примыкание. Учитывая степень спаянности главного и зависимого компонента, А.М.Пешковский ввел понятие сильной и слабой разновидности подчинительной связи. Сильная и слабая разновидность характерна только для управления и примыкания.
Согласование – это тип подчинительной связи, при которой форма зависимого слова уподобляется форме главного в роде, числе и падеже. При согласовании чаще всего реализуется атрибутивный тип отношений: старый сад, вкусное яблоко, сильная жара. При согласовании в качестве главного компонента всегда выступает имя существительное, а в качестве зависимого – прилагательное, причастие, местоимение-прилагательное и числительное в косвенном падеже: легкий шаг, разбитая посуда, почерневшая поверхность, наш дом, твои вещи, трех книг, трем книгам, двум друзьям, о двух друзьях.
Особым видом согласования многие лингвисты называют приложение, при котором в качестве зависимого компонента выступает имя существительное: путь-дорога, отец-старик, месяц май, дерево сосна, город Москва. Согласование происходит только в падеже, причем отмечают грамматическую специфику этой связи. и главный, и зависимый компонент равноценны, то есть в таких конструкциях имеется элемент равноправия. Отношения между компонентами называются аппозитивными. Другие лингвисты предлагают называть этот вид связи между компонентами параллельной.
Управление – это такой вид связи, при котором зависимое слово ставится при главном в определенном падеже. Например: бросать снежки (в.п.), рубить топором (т.п.), выполнение задания (р.п.). Различаются глагольное, именное и наречное управление: выполнить задание, выполнение задания, быстрее ветра. Управление может быть предложенным (думать о сыне) и беспредложным (бросить снежок). При управлении реализуются объектные, обстоятельственные и комплетивные отношения.
Различают сильное и слабое управление. При сильном управлении форма зависимого компонента предсказывается главным: читать (что?) книгу, три (чего?) Р.п., выйти из (чего?) Р.п., упереться (во что?) В.п., завернуть (за что?) В.п.
Чаще всего сильное управление характерно для словосочетаний с объектными и комплетивными отношениями.
При слабом управлении форма зависимого компонента не предсказывается главным: гулять у реки, в лесу, целый час. Выбор формы зависимого компонента диктуется намерением говорящего. В основном слабое управление характерно для словосочетаний с обстоятельственными отношениями. Переходные глаголы чаще всего образуют словосочетания с сильным управлением.
Средством грамматической связи при управлении является окончание и предлог.
Примыкание – это такой тип подчинительной связи, при которой в роли зависимого компонента выступает неизменяемое слово наречие, инфинитив, деепричастие, несклоняемые прилагательные. Неизменяемый компонент связан с главным словом по смыслу и интонационно.
В большинстве случаев примыкание является слабой связью. Сильная связь имеет место у информативно недостаточных глаголов, в восполнении их смысла участвуют наречие, компаратив (сравнительная степень наречий), инфинитив. Например (в данных примерах обратите внимание на информативно недостаточные глаголы): находиться рядом, оказаться далеко, вести себя странно, поступить честно, действовать разумно, выглядеть устало, стоить дорого, чувствовать себя лучше (в примерах представлены так называемые модальные глаголы), начал спорить, отказался вернуться, рискнул остаться, стремился понравиться, хотел уйти, цвет хаки.
По составу словосочетания могут быть простыми и сложными. Простые словосочетания могут состоять из 2 знаменательных слов: новый дом, красивые вещи; они образуются прежде всего на основе согласования. Простые словосочетания могут состоять также из знаменательного слова и семантически нечленимого словосочетания: юбка цвета беж, пять часов мужества, повторять изо дня в день, беседовать с глазу на глаз. К простым относятся словосочетания с двойным сильным управлением: отдать книгу ученику, присвоить звание ученому, вдохновлять солдат на подвиг. Данный случай является трудным для анализа.
Сложные словосочетания состоят из 3 и более компонентов, причем в таких словосочетаниях возможны различные типы связи: неожиданный приход начальника, дважды повторить просьбу, стремление женщин к образованию, сочувственно относиться к проблемам образования, заставили работать токарем, наскучил света шум, предмет его привычных дум. (В поэтическом тексте процент появления сложных словосочетаний выше). При анализе сложные словосочетания мы будем разлагать на простые.
По степени семантической спаянности компонентов различаются синтаксически свободные и синтаксически несвободные (цельные) словосочетания. Не путать с семантически нечленимыми. Иначе их еще назыают членимые и нечленимые словосочетания. В синтаксически свободных (членимых) словосочетаниях каждый компонент функционирует как отдельный член предложения, так как реализует собственное значение и является структурно оформленным: зеленое яблоко, открытая дверь, подойти к дому, влюбиться со страшной силой.
Синтаксически несвободные (нечленимые, цельные) словосочетания выполняют функцию одного члена предложения, так как главное слово является семантически недостаточным и смысловую нагрузку несет зависимый компонент. Выделяют следующие типы нечленимых словосочетаний:
1. Количественно-именные словосочетания с главным словом числительным или словом, имеющим числовую семантику: три пальмы, много песен, несколько минут. С этими словосочетаниями сближаются по значению словосочетания, в которых главное слово имя существительное образовано от количественных числительных: сотни, десятки, множество. Сюда же относятся имена существительные с количественным значением: большинство, меньшинство, стая, гроздь, груда. Например: груда камней, стакан молока, метр сукна, стадо коров, кусок неба, край деревни, группа студентов, толпа народу. Существует способ разграничения синтаксически свободных и синтаксически несвободных словосочетаний. Словосочетание с управлением стая волков заменяется словосочетанием с согласованием волчья стая. Если при такой трансформации значение словосочетания не меняется , то каждый компонент словосочетания можно рассматривать как отдельный член предложения. Еще один пример: стакан молока – молочный стакан. Семантика словосочетаний различная, значит все словосочетание стакан молока можно рассматривать как один член предложения. Некоторые словосочетания вообще не допускают такой трансформации: большинство избирателей, метр сукна.
2. Особую группу составляют словосочетания с главным словом числительным и местоимением и зависимым существительным с предлогом из: двое из группы, кто-то из нас, в один из поселков. Одним из наиболее важных условий успеха является желание работать.
3. К цельным словосочетаниям относятся словосочетания, в состав которых входят словоформы с глазами, с носом, лицом роста. Эти словоформы нуждаются в лексичесих конкретизаторах.
4. Особую группу составляют сочетания существительных с предлогами от-до, с-до. От Москвы до Ленинграда и обратно до Москвы пляшут линии, ограды и мосты.
5. К цельным словосочетаниям относятся составные сказуемые: отказался подчиняться, осмелился перечить, хотел понять, дерзнул возразить, отдать предпочтение, рад поговорить, дать надежду, иметь надежду, казаться новым. Хотел читать, но труд упорный ему был тошен.
6. Как один член предложения имеет смысл рассматривать словосочетания, представляющие собой метафоры. Такие словосочетания очень часто приближаются к семантически неразложимым словосочетаниям. С улыбкой ясною природа сквозь сон встречает утро года.
7. Одним из видов цельных словосочетаний является словосочетание с общим значением совместности, при этом включают предлоги с: мы с тобой, мать с сыном.
При таких словосочетаниях сказуемое стоит во множественном числе. При сказуемом в форме единственного числа словосочетание не является синтаксически неразложимым. Сравните: Мать с сыном пошли гулять в парк. Мать с сыном пошла гулять в парк.
В целом роботы по использованию в различных сферах деятельности делят на три группы:
1) человекоподобные (бытовые);
2) информационные (исследовательские), предназначенные для сбора информации в средах, опасных или не доступных для человека;
3) промышленные, предназначенные для автоматизации технологических процессов в различных отраслях промышленности.
Промышленные роботы (ПР) имеют большое число классификационных признаков:
1. По характеру выполняемых операций:
- технологические (производственные); вспомогательные (подъемо-транспортные);
- универсальные.
2 .По степени специализации: универсальные (многоцелевые); специализированные;
- специальные (целевые).
3 .По способу управления: с «жесткой» программой (I поколение); адаптивные (II поколение); интегральные (III поколение).
4. По области применения (по виду производства):
- механообработка; кузнечно-прессовое производство; литейное производство; сборка;
- сварка; транспортно-складские и т. д.
5. По грузоподъемности (главный параметр ПР).
Под номинальной производительностью ПР понимается наибольшее значение массы предметов производства или технологической оснастки, при котором гарантируется их захватывание, удержание и обеспечиваются установленные значения эксплуатационных характеристик ПР.
Если ПР имеет несколько рук, то оценивается грузоподъемностькаждой руки.
По грузоподъемности (ГОСТ 25204-82) промышленные роботы подразделяются на:
1) сверхлегкие – до 1 кг (0,08; 0,16; 0,32; 0,4; 0,5; 0,63; 0,8; 1,0);
2) легкие от 1 кг до 10 кг (1,25; 1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,0; 10,0);
3) средние от 10 до 200 кг (12,5; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160; 200);
4) тяжелые от 200 до 1000 кг (250; 320; 400; 500; 630; 800; 1000);
5) сверхтяжелые – свыше 1000 кг (ряд R10 по ГОСТ 8032-56, начиная с 1250).
6. По числу степеней подвижности: с одной степенью подвижности; двумя степенями подвижности; с n степенями подвижности.
Число степеней подвижности манипулятора робота определяется как совокупность числа степеней свободы кинематической цепи манипулятора ПР в системе координат, относительно которой задаются геометрические характеристики рабочей зоны ПР.
Степени подвижности манипулятора делят на:
- переносные, используемые для перемещения рабочего органа в пространстве;
- ориентирующие, используемые для изменения положения РО в пространстве.
Как правило, достаточно 3–4 переносных степени подвижности (что дает больше сотни структурно-кинематических схем манипулятора). Для полной ориентации объекта достаточно 3-х вращательных ориентирующих степеней подвижности.
7. По мобильности (по возможности перемещения):
- стационарные;
- подвижные (установленные на транспортное средство).
8. По конструктивному исполнению (по способу установки):
- напольные; подвесные (портальные, тельферные); встроенные (пристаночные).
9. По виду основных координатных перемещений ПР разделяются на группы роботов, манипуляторы которых работают:
а) в прямоугольной системе координат;
б) в цилиндрической системе координат;
в) в сферической системе координат;
г) в угловой системе координат;
д) в комбинированной системе координат.
Каждой из систем координат соответствует вполне определенная кинематико-компоновочная схема манипулятора, вид которой определяется конструктивным исполнением поступательных и вращательных звеньев.
10. По типу силового привода: пневматические; гидравлические; электромеханические;
комбинированные.
11. По характеру программирования скоростей и перемещений (по виду управления):
жестко программируемые; гибко программируемые.
При жестком программировании исполнительное устройство управляется по неизменной заранее введенной программе.
При гибком программировании – программа может изменяться на основе поставленной цели и информации об объектах управления и производственной среде.
При жестком программировании выделяют:
1) цикловое управление, при котором движение рабочего органа происходит в упорядоченной последовательности с помощью путевых выключателей или времязадающих элементов (число точек обычно – две, три);
2) позиционное управление, при котором движение РО происходит по заданным точкам позиционирования без контроля траектории движения между ними (цикловое управление является частным случаем позиционного).
3) контурное управление, при котором движение РО происходит по заданной траектории с установленным распределением по времени значений скорости.
4) комбинированное управление.
12. По способу программирования:
- программируемые обучением (наиболее распространенный способ);
- программируемые аналитически;
- самообучение.
В первом случае управляющая программа формируется в режиме диалога СПУ с оператором. Оператор с помощью пульта управляет роботом, последовательно отрабатывая требуемые операции. При этом информация о движениях ПР заносится в запоминающее устройство СПУ робота.
При втором методе программа составляется на основе предварительных расчетов.
В третьем способе: программа формируется на основе информации о состоянии внешней среды.
Управляющая программа – это последовательность инструкций на некотором формальном языке. В общем виде для функционирования ПР необходима следующая информация:
1) о последовательности выполнения шагов программы;
2) о пространственном положении отдельных степеней подвижности;
3) о времени выполнения отдельных шагов программы и отдельных управляющих команд.
Материальным носителем программы могут быть:
1) механические устройства (упоры, кулачки, копиры и т.д.);
2) коммутаторы (штекерные панели, барабаны, коммутаторные поля и т. д.);
3) быстросменные программоносители (перфоленты, магнитные ленты, диски и т. д.).
13. По быстродействию и точности движений.
Эти два параметра взаимосвязаны и характеризуют динамические свойства роботов. Между быстродействием и точностью позиционирования имеется определенное противоречие.
Быстродействие определяется скоростью передвижения по отдельным степеням подвижности:
- малое быстродействие – до 0,5 м/с (до 90 град/с);
- среднее (60–65 % ПР) – от 0,5 до 1 м/с (от 90 до 270 град/с);
- высокое (20 % ПР) – более 1м/с (более 270 град/с).
Быстродействие современных ПР нельзя считать достаточным, оно должно быть повышено не менее чем в 2 раза.
Точность манипулятора характеризируется результирующей погрешностью позиционирования (при дискретном движении) или отработкой заданной траектории (при непрерывном движении).
Чаще всего точность характеризуется абсолютной погрешностью.
1. Малая – при линейной погрешности > 1 мм;
2. Средняя – от 0,1 до 1 мм. (60...65 %);
3. Высокая – менее 0,1 мм (около 15 %).
Погрешность манипулирования ПР, предназначенных для выполнения наиболее грубых, например, транспортных движений, превышает 1 мм.
По сравнению с рукой человека недостатком современных ПР является снижение точности с увеличением скорости хода манипулятора. У человека эти параметры в значительной мере развязаны благодаря разделению движений на грубое (быстрое) и точное (медленное).
Наряду с классификационными параметрами ПР характеризуются параметрами, обусловливающими их технический уровень.
Технические требования и параметры ПР.
Номинальная грузоподъемность mн (кг) представляет собой наибольшую массу объекта манипулирования вместе со схватом, которая гарантирует захватывание и удержание объекта и обеспечивает установленные эксплуатационные характеристики робота. Кроме того, для ПР, работающих в угловой системе координат необходимо указывать номинальный момент нагрузки Тi для соответствующей степени подвижности относительно оси ее перемещения. Это связано с тем, что для рассчитанной грузоподъемности длина схвата потребителем может быть увеличена, что без дополнительных ограничений может привести к выходу из строя соответствующего привода.
В некоторых случаях в технической характеристике указывают кроме номинальной грузоподъемности и момента нагрузки максимальные их значения при уменьшенных динамических параметрах (ускорении, скорости). Это связано с тем, что при одном и том же моменте привода, уменьшая ускорения, и следовательно, инерционную нагрузку, можно перемещать большую массу. В этом случае указывают максимальную грузоподъемность для скорости, равной половине максимальной.
Число степеней подвижности робота n, под которым подразумевается число степеней свободы рабочего органа относительно звена, принятого за неподвижное, без учета движения губок схвата.
Диапазоны перемещений по степеням подвижности: Si (мм), φi (рад).
Скорости перемещения по степеням подвижности: максимальные скорости Vmax (м/с), ωmax (1/с). Средняя (цикловая) скорость характеризует производительность робота и равна значению перемещения, деленному на время движения между позициями.
Максимальное ускорение по степеням подвижности: amax (м/с2), εmax (град/с2).
Погрешность позиционирования рабочего органа Δ (мм) – отклонение фактического положения схвата от заданного программой. Различают роботы с малой точностью позиционирования (Δ › ± 1 мм), способные выполнять транспортные и некоторые основные технологические операции (окраску), не требующие высокой точности; роботы со средней точностью позиционирования (0,1≤Δ≤1 мм), которые находят самое широкое применение; роботы с высокой точностью позиционирования (Δ≤0,1 мм), применяемые для прецизионной сборки.
Кинематическая структура манипулятора определяет число звеньев и тип кинематических пар их соединения.
Рабочая зона робота – пространство, в котором может находиться его рабочий орган.
Объем рабочей зоны Vрз (м3) – объем, заключенный внутри границ рабочей зоны.
Тип системы координат определяется сочетанием кинематических пар.
Тип системы программного управления (СПУ)определяется способом позиционирования (цикловой, позиционный, контурный) и типом применяемых аппаратных средств.
Объем памяти СПУ представляет собой число кадров программы. Под кадром понимают минимальный элемент программы, состоящий из определенной группы команд и адресов, по которым выполняются команды и обеспечивается проверка их выполнения. В цикловой СПУ в состав кадра входят команды на перемещение степеней подвижности робота, управления технологическим оборудованием и вспомогательные команды. В позиционную систему СПУ дополнительно входят данные о положении и скорости перемещений степеней подвижности манипулятора, точности позиционирования объекта манипулирования. Цикловые СПУ характеризуются малым объемом памяти (до 100 кадров). Средним объемом памяти (от 1200 до 800 кадров) характеризуются позиционные СПУ и большим (свыше 800 кадров) – контурные СПУ.
Габаритные размеры L, B, H (м).
Масса робота, манипулятора, СПУ соответственно mp, mм, mСПУ (кг).
Средняя наработка на отказ t (час) – показатель ремонтопригодности, равный среднему значению времени, затраченному на отыскание и устранение одного устойчивого отказа при работе робота. В перспективе следует закладывать конструктивные решения, обеспечивающие среднее время восстановления не более 4,0 ч при средних наработках на отказ t ≥ 1000 ч и 8,0 ч при средних наработках на отказ t ≥ 3000 ч.
Средний срок сохраняемости tсохр (ч) – показатель, равный среднему значению календарной продолжительности хранения робота.
Средний ресурс tр (ч) – показатель долговечности; рассчитывается как среднее значение времени использования до принятого предельного состояния (капитального ремонта, списания). Чаще всего значение среднего ресурса устанавливается до капитального ремонта. Ресурс большинства отечественных роботов составляет 8000…9000 ч, иногда 10000 ч.
Выпускаемые в настоящее время промышленные роботы можно классифицировать по ряду признаков с учетом целевого назначения и функциональных возможностей, грузоподъемности, типа систем управления, типа компоновочных схем, конструктивного исполнения (модификации). Рекомендуемые элементы классификации и кодирования ПР приведены в таблице 3.1
Таблица 3.1
| Позиция в коде | Классификационный признак | Рекомендуемые обозначения |
| Целевое назначение и функциональные возможности | Г, Л, К, С, У | |
| Вид оборудования | М | |
| Грузоподъемность, кг | 1;2,5; 5; 10; 20; 40; 80; 160; 250; 500. | |
| Тип системы | Ц, Ф2, Ф3, Ф4 | |
| Компоновочная схема | 00-99 | |
| Конструктивное исполнение (модификация) | 00-99 |
На первом месте в модели ПР указывается значение классификационного признака по целевому назначению и функциональным возможностям. По этому признаку приняты следующие обозначения: Г – для обслуживания в гальваническом производстве; К – для обслуживания кузнечно-прессового оборудования; Л – для обслуживания литейных машин; С – для обслуживания металлорежущих станков; У – универсальные.
Второе место в общем коде модели отводится обозначению типа оборудования. В данном случае буква М означает «Манипулятор автоматический с программным управлением».
Третье место в коде характеризует грузоподъемность робота.
На четвертом месте кода приводится тип системы управления ПР. Рекомендованы следующие обозначения: Ц – цикловое ПУ; Ф2 – позиционное ЧПУ; Ф3 – контурное ЧПУ; Ф4 – универсальное ЧПУ..
На пятом месте приводится компоновочная схема. Принято классифицировать компоновки механической системы ПР в зависимости от применяемой системы координат основных перемещений.
Шестое место характеризует конструктивное исполнение (модификацию) робота.
В соответствии с приведенной классификацией обозначение робота модели СМ80Ц.48.11 можно расшифровать следующим образом: СМ – автоматический манипулятор для обслуживания металлорежущих станков; 80 – грузоподъемность, кг; Ц – цикловое программное управление; 48 – индекс схемы компоновки( в данном случае он указывает, что робот работает в полярной системе координат); 11 – конструктивное исполнение.
Международная (IFR) классификация промышленных роботов по областям применения:
таблица 3.2.
| IFR класс | Области технологического применения |
| Неопределенные | |
| Процессы литья | |
| Фасонное литье | |
| Прочие | |
| Процессы литья пластмасс | |
| Процессы термической обработки | |
| Процессы штамповки (ковки) | |
| Процессы сварки | |
| Дуговая сварка | |
| Точечная сварка | |
| Газовая (плазменная) сварка | |
| Лазерная сварка | |
| Прочие | |
| Процессы распыления | |
| Окраска (нанесение покрытий) | |
| Герметизация (склеивание) | |
| Прочие | |
| Механическая обработка | |
| Установка (съем) | |
| Резка (шлифовка) (зачистка) (полировка) | |
| Прочие | |
| Специальные процессы | |
| Лазерная и плазменная резка | |
| Гидроабразивная резка | |
| Прочие | |
| Сборка | |
| Механическая сборка (соединение) | |
| Сортировка( монтаж) резка | |
| Сцепление (прихватка) | |
| Пайка мягким припоем | |
| Управление сборочными операциями | |
| Прочие | |
| Процессы складирования (упаковки) | |
| Измерение (контроль) диагностика | |
| Обработка материалов | |
| Прочие |
Основную группу роботов по их технологическому назначению составляют роботы,
предназначенные для сварки и родственных технологий (резка, пайка, сборка).
Второй по численности парка после сварки является сборка.
По типу системы управления промышленные роботы делятся на три поколения: программные, адаптивные и интеллектные (с элементами искусственного интеллекта). В роботах первого поколения перепрограммирование производится человеком, после чего промышленный робот действует автоматически, многократно повторяя жестко заданную программу.
Во втором поколении программы действия промышленного робота задаются человеком, но сам робот имеет свойство в определенных рамках перепрограммироваться (адаптироваться) в ходе технологического процесса в зависимости от обстановки, которая неточно определена заранее.
В третьем поколении задание на работу вводится человеком в более общей форме, а сам промышленный робот имеет возможность принимать решение и планировать свои действия в распознаваемых им неопределенной или меняющейся обстановке, чтобы суметь выполнить заложенное в его память задание.
Роботы трех поколений образуют иерархию, основанием которой служат простейшие роботы-автоматы, а вершиной — сложные, эволюционирующие интеллектные роботы. Подобно живым организмам роботы не только развиваются по пути от простого к сложному, не только прошли в своем развитии несколько поколений, но и образовали симбиоз этих поколений, поскольку создание высших поколений роботов не отрицает необходимость в совершенствовании и использовании роботов низших поколений.
Структура робота 1-го поколения приведена на рис. 3.2. Из сенсорных элементов в этой структуре используются лишь датчики внутренней информации, позволяющие автоматически определять текущее состояние исполнительных устройств. Управление осуществляется управляющим автоматом, который может быть реализован на основе микропроцессорных контроллеров. Программу работы робота задает человек-оператор, и в процессе функционирования робота эта программа не меняется.
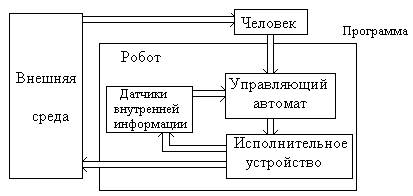
Рис.3.2. Структура робота первого поколения.
Роботы второго поколения более сложны. Они очувствлены и имеют систему управления, содержащую те элементы искусственного интеллекта, которые необходимы для обработки сенсорной информации и формирования на ее основе управляющих воздействий. Структура робота 2-го поколения показана на рис. 3.3. В этой структуре наряду с датчиками внутренней информации используются датчики внешней информации, позволяющие роботу адекватно реагировать на изменения внешней среды при исполнении заранее заданной программы. Причем в зависимости от состояния датчиков, робот может автоматически выбирать альтернативные ветви основной программы.

Рис.3.3. Структура робота второго поколения
Роботы третьего поколения имеют наиболее развитую структуру, содержащую систему ИИ (рис.3. 4).

Рис.3.4. Структура робота третьего поколения.
Принципиальное отличие интеллектного робота заключается в том, что он способен автоматически строить модель внешней среды и использовать эту модель для формирования программы своего поведения. Иными словами, такой робот, как и мифический треножник Гефеста, получает указания весьма общего характера, например: пойти туда-то, взять то-то, перенести туда-то и т. п. Получив подобное задание на естественном языке и расшифровав его в подсистема общения, интеллектный робот самостоятельно планирует траекторию перемещения с учетом имеющихся знаний о внешней среде и тех сведений, которые он оперативно получает через сенсорную систему в процессе выполнения задания. Если при этом встречаются непреодолимые препятствия или другие затруднительные ситуации, система ИИ непосредственно или через систему связи, показанную на рис.1, связывается с человеком-оператором, задает ему конкретные вопросы и, получив помощь, снова действует автономно..
Очевидно, что для реализации разумного поведения в состав робота наряду с сенсорной, управляющей и эффекторной системами должна входить система, имитирующая интеллект человека. Искусственный интеллект необходим для управления роботом при его автономном функционировании в априори неисследованной внешней среде. Необходим он также и для общения на естественном языке с человеком-оператором, который в общем случае находится на значительном удалении от робота.
С учетом отмеченного обстоятельства структуру робота можно представить в виде схемы, показанной на рис. 3.5.
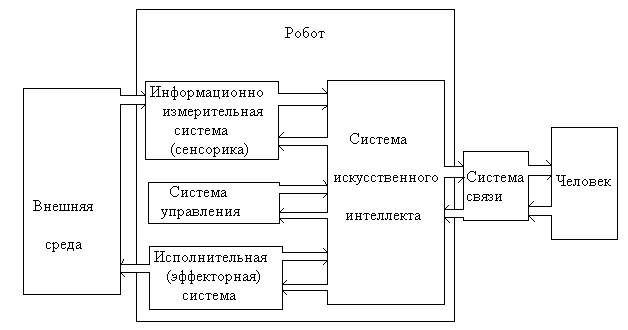
Рис. 3.5. Подробная структура робота третьего поколения.
Эта схема построена в предположении, что управление роботом осуществляется по иерархическому принципу, в соответствии с которым система управления (СУ) реализует тактический уровень, а система искусственного интеллекта (СИИ) воспроизводит стратегический уровень управления. Причем, используя биологическую терминологию, можно считать, что СУ служит аналогом спинного мозга, а СИИ — техническим аналогом высших отделов головного мозга.
Система управления робота может быть выполнена в виде специализированного автомата с памятью либо реализована программным способом на основе универсальной ЭВМ. То же самое можно сказать и о системе, искусственного интеллекта. Система связи включает проводной или беспроводной канал передачи информации и на приемном конце также предполагает использование ЭВМ. На экране дисплея этой ЭВМ отображаются ситуации, попадающие в поле зрения робота либо непосредственно, либо в виде модели, которую робот синтезирует автоматически.
Наиболее сложной и мало разработанной системой в структуре робота является система искусственного интеллекта (ИИ). Сложность создания системы ИИ связана с тем, что до конца не ясно, как устроен и как функционирует интеллект естественный. Попытки обойти эту проблему привели к разработке роботов, у которых система ИИ отсутствует полностью. Это так называемые роботы первого поколения, предназначенные для работы в исследованной и специально организованной внешней среде. Они лишены не только интеллекта, но и сенсорики. Образно говоря, такие роботы имитируют поведение глухих, слепых и неразумных животных.
Разделение роботов на поколения является общепринятой и важной структурной особенностью робототехники. Однако такое разделение не исчерпывает всех классификационных признаков современных роботов.
Промышленные роботы агрегатно-модульного типа.
Агрегатно-модульный принцип предполагает создание ПР на базе унифицированных узлов, или модулей. Этот метод имеет следующие преимущества:
возможность построения специальных и специализированных роботов для конкретной технологической операции, не обладающих избыточностью функций и поэтому более дещевых по сравнению с универсальными роботами;
сокращение времени и трудоемкости проектирования специальных роботов, т.к. они создаются на базе унифицированных узлов, номенклатура которых может пополняться
повышение надежности вследствие отработанности входящих в него унифицированных узлов и отсутствия избыточности;
удешевление производства роботов вследствие ограниченной номенклатуры деталей и узлов и, следовательно, повышение серийности выпуска
Улучшение условий эксплуатации и ремонта роботов, вследствие уменьшения разнообразия конструкций узлов и деталей;
сокращение сроков подготовки обслуживающего персонала.
Вместе с тем агрегатно-модульный принцип имеет определенные недостатки: отказ в некоторых случаях от более выгодных конструктивных решений в пользу менее выгодных, но соответствующих принципу агрегатного построения; увеличение габаритов и массы конструкции; увеличение числа стыков, что повышает трудоемкость сборки роботов, снижает жесткость и точность.
Существуют различные формы реализации принципа агрегатного построения роботов из унифицированных узлов, выполняющих определенные функции. Можно выделить следующие основные принципы классификации при построении групп роботов: вид системы координат, способ установки робота в РТК, специализация, число степеней подвижности, грузоподъемность, тип системы управлении.
По специализации и компоновке агрегатно-модульные роботы могут быть условно разделены на две группы:
агрегатирование на базе одной принципиальной компоновочной схемы (однотипные роботы); конкретные исполнения роботов различаются размерами и грузоподъемностью, а также характером комплектаций (системами управления, дополнительными модулями и т.п.);
агрегатирование, дающее возможность получать несколько различных компоновочных схем (разнотипные роботы), в том числе различающиеся видом системы координат, формой и размерами рабочих зон и другими признаками.
По характеру технических показателей агрегатно-модульные роботы могут быть разделены на три группы: с неизменными значениями основных технических показателей, с ограниченным диапазоном и с широким диапазоном основных технических показателей.
По типу системы управления различают роботы, комплектуемые системами управления одного типа, различных типов.
Унифицированный узел робота – сборочная единица ПР с унифицированными присоединительными размерами и параметрами внешнего сопряжения.
Агрегат ПР – совокупность деталей и узлов, образующих механизм, предназначенный для выполнения движений по одной степени подвижности, реализуемых с помощью присоединяемого к нему привода, с унифицированными местами крепления, в том числе крепления приводов. В некоторых случаях агрегат может включать в себя редуктор, передаточный механизм или его часть.
Разновидностью агрегатно-модульного принципа построения роботов является модульный принцип. В этом случае роботы проектируют на базе функциональных модулей, включающих все необходимые механизмы, приводы, датчики обратной связи, энергетические и информационные коммуникации, необходимые для работы модуля.
Исполнительный модуль – реализует движение робота по одной степени подвижности, включает в себя агрегат, двигатель, редуктор, датчики обратной связи, унифицированные присоединительные размеры и параметры внешнего сопряжения с цепями энергопитания и управления.
Модуль-привод преобразует команды, поступающие от устройства управления, в необходимые усилия или крутящий момент. Включает в себя двигатель, редуктор, датчики обратной связи и устройство управления приводом, обеспечивающие требуемые движения звеньев механизмов.
Модуль устройства управления – сборочная единица с унифицированными присоединительными размерами, подключаемая в общую схему через унифицированные интерфейсы и выполняющая какие-либо заданные функции (например, процессор, группа плат сопряжения с каналом внешней информации).
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. По каким признакам классифицируются промышленные роботы?
2. По каким параметрам выбираются модели промышленных роботов?
3. Какие поколения роботов Вы знаете?
4. В чем сущность агрегатно-модульного построения промышленных роботов?
5. Как расшифровать модель робота СМ40Ц1216?