Гладкая цилиндрическая поверхность полого немагнитного ротора способствует снижению уровня шумов, создаваемых двигателем.
Полый немагнитный ротор исполнительного асинхронного микродвигателя в отличие от роторов других типов обладает незначительным индуктивным сопротивлением, что повышает линейность механических и регулировочных характеристик двигателя.
В микродвигателях мощностью в единицы ватт и менее обмотки возбуждения и управления часто размещают в пазах внутреннего статора. Тогда внешний статор пазов не имеет и служит лишь для уменьшения магнитного сопротивления. При такой конструкции облегчается процесс укладки обмоток в пазы и несколько повышается вращающий момент, но увеличивается диаметр ротора вследствие увеличения обмоточного пространства на внутреннем статоре, что приводит к некоторому увеличению момента инерции ротора. Возможно также размещение одной из обмоток на внутреннем, а другой – на внешнем статоре.
В воздушном зазоре между внешним и внутренним статорами находится полый ротор 3, выполненный в виде тонкостенного стакана из немагнитного материала, чаще всего из сплавов алюминия. Дно ротора жестко укрепляют на валу 6, который вращается в подшипниках 7, расположенных в подшипниковых щитах. Толщина стенок ротора в зависимости от мощности двигателя колеблется в пределах 0,1 – 1 мм. Полый ротор имеет очень малую массу и, следовательно, незначительный момент инерции.
Рис. 2.2 Рис. 2.3
В зависимости от конструкции ротора различают три основных типа исполнительных асинхронных микродвигателей: с короткозамкнутым ротором типа «беличья клетка», с полым немагнитным и полым ферромагнитным роторами.
Рис. 2.1
Следовательно, активное сопротивление ротора у исполнительного асинхронного микродвигателя должно быть таким, чтобы обеспечивалось условие sк ≥ 1. Условие sк > 1, как будет показано далее, является необходимым и для отсутствия параметрического самохода, который может возникнуть при неправильном выборе параметров двигателя. Критическое скольжение реальных исполнительных асинхронных микродвигателей выбирают обычно в пределах sк = 2÷4.
На рис. 2.1, б представлены зависимости вращающего момента от скольжения асинхронного микродвигателя общего применения (кривая 1) и исполнительного асинхронного микродвигателя (кривая 2).
Исполнительные асинхронные микродвигатели с ротором типа «беличья клетка» имеют такое же устройство, как и трехфазный асинхронный двигатель с аналогичным ротором. Отличие состоит только в том, что в настоящее время их выпускают в основном так называемой сквозной конструкции. При такой конструкции (рис. 2.2) внутренний диаметр статора 1, на котором расположена двухфазная обмотка 2, равен наружному диаметру подшипников 5. Это позволяет обрабатывать внутреннюю поверхность статора и отверстия под подшипники в подшипниковых щитах 4 с одной установки на станке. Тем самым уменьшается эксцентриситет расположения ротора 3 в расточке статора, что дает возможность уменьшить минимально допустимый воздушный зазор до 0,03 – 0,05 мм. Уменьшение воздушного зазора при неизменных габаритных размерах и магнитном потоке обеспечивает снижение намагничивающего тока и, следовательно, уменьшение электрических потерь в статоре, повышение к.п.д. и коэффициента мощности cos φ1. И наоборот, при неизменных габаритных размерах, намагничивающей составляющей м.д.с. статора и электрических потерях в обмотке статора, т. е. при одинаковых условиях нагрева двигателя, уменьшение воздушного зазора дает возможность увеличить основной магнитный поток (при отсутствии насыщения) и тем самым вращающий момент.
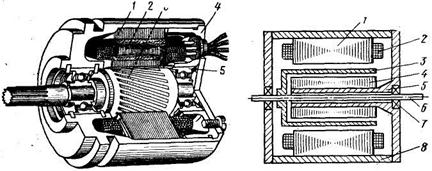
В системах автоматики широко применяются исполнительные микродвигатели с полым немагнитным ротором. Конструктивная схема такого микродвигателя представлена на рис. 2.3. Внешний статор 1, закрепленный в корпусе 8, ничем не отличается от статора обычного асинхронного микродвигателя. Его набирают из листов электротехнической стали, изолированных друг от друга. В пазах статора располагают две обмотки 2 – возбуждения и управления, сдвинутые в пространстве на электрический угол 90° (здесь и далее под электрическим углом понимаем пространственный угол, умноженный на число пар полюсов машины). Внутренний статор 4, который набирают из листов электротехнической стали на цилиндрическом выступе одного из подшипниковых щитов 5, служит для уменьшения магнитного сопротивления на пути основного магнитного потока, проходящего через воздушный зазор.
На рис. 2.4 представлен исполнительный микродвигатель АДП-123 с полым немагнитным ротором 3 и обмотками возбуждения на внешнем статоре 1. Внутренний статор 2 – безобмоточный.

Рис. 2.4 Рис. 2.5