Построение планов скоростей и ускорений
Лекция № 3
Планом скоростей (ускорений) называют рисунок, на котором в масштабе изображены векторы, равные по модулю и направлению скоростям (ускорениям) различных точек механизма в данный момент времени.
Планы скоростей и ускорений строятся по векторным уравнениям, которые составляются отдельно для каждой группы Ассура в порядке присоединения их к ведущему звену и к другим звеньям механизма.
Построение планов скоростей и ускорений рассмотрим на примере шарнирного четырехзвенника (рис.1, а).
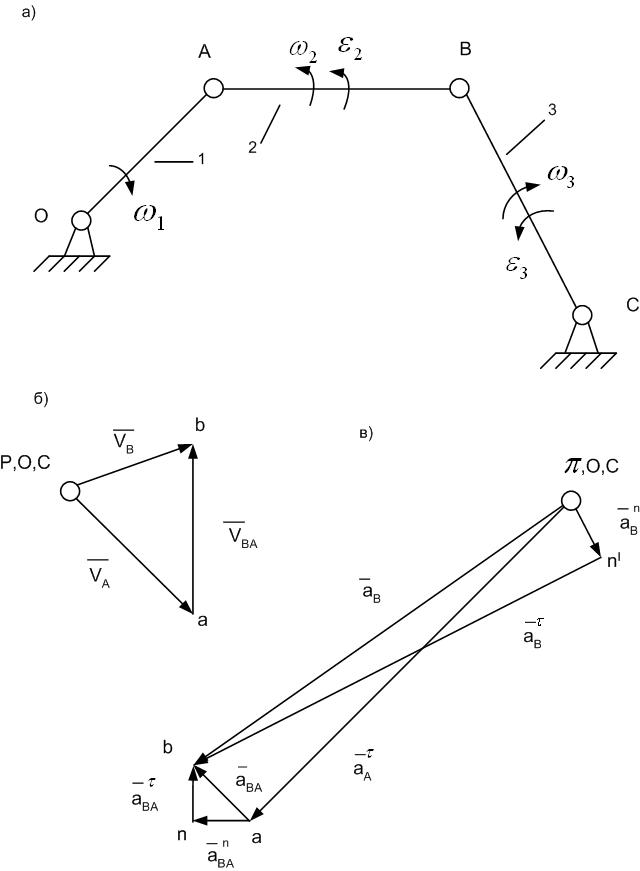
Рис. 1. Построение планов скоростей и ускорений для шарнирного четырехзвенного механизма
Известными являются:
а) размеры звеньев 
 ,
,  ,
,  ;
;
б) положение механизма;
в) закон движения ведущего звена  .
.
Построение планов ведется в порядке построения механизма.
Для ведущего звена определяем величину скорости в точке  :
:
 . (3.1)
. (3.1)
Вектор  перпендикулярен радиусу, т.е. отрезку
перпендикулярен радиусу, т.е. отрезку  , и направлен в сторону, определяемую направлением .
, и направлен в сторону, определяемую направлением .
Задаемся масштабом плана скоростей  и вычисляем отрезок
и вычисляем отрезок  , изображающий в выбранном масштабе вектор
, изображающий в выбранном масштабе вектор  ,
,
 .
.
Из произвольной точки  , называемой полюсом плана скоростей, откладываем в указанном направлении отрезок (рис. 1, б).
, называемой полюсом плана скоростей, откладываем в указанном направлении отрезок (рис. 1, б).
Составим векторные уравнения для группы Ассура  . Точка
. Точка  принадлежит звеньям
принадлежит звеньям  и
и  , поэтому
, поэтому
 , (3.2)
, (3.2)
 .(3.3)
.(3.3)
В нашем случае уравнение (3.2) превращается в тождество, т.к. скорость точки  равна нулю
равна нулю , поэтому обходимся одним уравнением (3.2).
, поэтому обходимся одним уравнением (3.2).
Скорость точки известна по направлению: так как точка движется по окружности радиусом  , то она перпендикулярна радиусу –
, то она перпендикулярна радиусу – , величина ее нам неизвестна. Скорость точки относительно точки
, величина ее нам неизвестна. Скорость точки относительно точки  также известна по направлению –
также известна по направлению –  . Величина ее нам неизвестна.
. Величина ее нам неизвестна.
Решая векторное уравнение графическим способом, получим план скоростей, т.к. векторное уравнение эквивалентно двум скалярным уравнениям.
В соответствии с векторным уравнением (3.2) через конец вектора (точку  ) проводим направление вектора
) проводим направление вектора 
 , а через полюс – направление вектора
, а через полюс – направление вектора 
 . Пересечение этих направлений (точка
. Пересечение этих направлений (точка  ) определяет отрезки
) определяет отрезки  ] и
] и  , изображающие в выбранном масштабе скорости соответственно и . Величины этих скоростей равны:
, изображающие в выбранном масштабе скорости соответственно и . Величины этих скоростей равны:
 ;
;
 .
.
Пользуясь построенным планом скоростей, можно определить угловые скорости звеньев и :
 ;
;
 .
.
Для определения направления  переносим вектор в точку механизма и рассматриваем движение этой точки относительно точки по направлению скорости . Из рисунка видно, что направлена против часовой стрелки.
переносим вектор в точку механизма и рассматриваем движение этой точки относительно точки по направлению скорости . Из рисунка видно, что направлена против часовой стрелки.
Аналогично определяем направление угловой скорости  . Перенеся вектор в точку, видно, что направлена по часовой стрелке.
. Перенеся вектор в точку, видно, что направлена по часовой стрелке.
Построим план ускорений. Ускорение точки состоит только из нормального ускорения, т.к. звено  движется равномерно и оно равно
движется равномерно и оно равно

 =
=  =
=  (3.4)
(3.4)
Вектор направлен по радиусу к центру – от точки к точке  .
.
Задаемся масштабом плана ускорений  и вычисляем длину отрезка
и вычисляем длину отрезка  , изображающего вектор в этом масштабе.
, изображающего вектор в этом масштабе.
 .
.
Из произвольной точки  , называемой полюсом плана ускорений, в направлении вектора откладываем отрезок (рис.,).
, называемой полюсом плана ускорений, в направлении вектора откладываем отрезок (рис.,).
Переходим к группе Ассура .
Векторные уравнения для точки группы имеют вид:
 = +
= +  , (3.5)
, (3.5)
=  +
+  . (3.6)
. (3.6)
Так как точка неподвижна, то ее ускорение равно нулю и уравнение (3.6) превращается в тождество. Поэтому можно ограничиться только уравнением (3.5).
Ускорения и слагаются из нормальных и касательных составляющих:
=  +
+  ,
, (3.7)
(3.7)
=  +
+  (3.8)
(3.8)
Подставляя значения и в уравнение (3.5), получим
+ = + + (3.9)
В уравнении (3.9) три вектора известны полностью – и по величине и по направлению, а два – только по направлению:
ускорение по величине равно
=  ¤
¤  , (3.10)
, (3.10)
вектор направлен вдоль звена  от точки к точке – оси вращения звена;
от точки к точке – оси вращения звена;
вектор направлен перпендикулярно звену ;
ускорение известно полностью;
ускорение по величине равно
=  /
/  ,(3.11)
,(3.11)
направлен вектор вдоль звена АВ от точки к точке ;
вектор направлен перпендикулярно звену  .
.
Построим план ускорений. Согласно правой части уравнения (3.9), из конца вектора , (отрезка ) откладываем в масштабе в указанном выше направлении вектор  , представляемый отрезком
, представляемый отрезком  , который вычисляется по формуле
, который вычисляется по формуле
= /  .
.
Из конца вектора (точки  ) проводим направление вектора (
) проводим направление вектора ( ).
).
Согласно левой части уравнения (3.9) из полюса плана ускорений откладываем в указанном ранее направлении вектор , изображаемый отрезком  , который вычисляется по формуле
, который вычисляется по формуле
= / mа .
Из конца вектора (точки ) проводим направление вектора (^ ). Пересечение направлений и (точка ) дает решение векторного уравнения: отрезок
) проводим направление вектора (^ ). Пересечение направлений и (точка ) дает решение векторного уравнения: отрезок  изображает вектор , а отрезок
изображает вектор , а отрезок  - вектор . Величины этих ускорений равны:
- вектор . Величины этих ускорений равны:
= ×mа; = × mа.
Складывая векторы и , т.е. соединяя точку с точкой , получим отрезок  , который изображает вектор полного ускорения точки -
, который изображает вектор полного ускорения точки -  .
.
Складывая векторы и , т.е. соединяя точки и , получим отрезок, который изображает вектор ускорения точки -  .
.
Величины этих ускорений равны:
= × mа; = × mа.
Определяем угловые ускорения звеньев и :
e2 = / ; e3 = / .(3.12)
Для определения направления этих ускорений переносим векторы и в точку механизма. Рассматривая движение точки относительно точки в направлении ускорения , устанавливаем, что e2 направлено против часовой стрелки. Рассматривая движение точки относительно точки в направлении , устанавливаем, что e3 также направлено против часовой стрелки.
Векторы абсолютных скоростей и ускорений точек всегда направлены от полюса к данным точкам.
Векторы относительных скоростей и ускорений каких – либо точек всегда соединяют концы векторов соответствующих абсолютных скоростей и ускорений и также направлены к данной точке.