Некоторые частные случаи движения точки.
Рис.6
.
Рис.5
Было показано, что ускорение точки  лежит в соприкасающейся плоскости, т. е. в плоскости
лежит в соприкасающейся плоскости, т. е. в плоскости  ; следовательно, проекция вектора
; следовательно, проекция вектора  на бинормаль равна нулю (
на бинормаль равна нулю (  ).
).
Вычислим проекции , на две другие оси. Пусть в моментвремени t точка находится в положении М и имеет скоростьv, a в момент  приходит в положение М1 и имеет скорость v1.
приходит в положение М1 и имеет скорость v1.
Тогда по определению
Перейдем в этом равенстве от векторов к их проекциям на оси  , проведенные в точке М (рис.5). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
, проведенные в точке М (рис.5). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
 .
.
Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М1 оси  параллельные
параллельные  и обозначим угол между направлением вектора
и обозначим угол между направлением вектора  и касательной
и касательной  через
через  . Этот угол между касательными к кривой в точках М и М1 называется углом смежности.
. Этот угол между касательными к кривой в точках М и М1 называется углом смежности.
Напомним, что предел отношения угла смежности к длине дуги  определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны
определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны  в точке М. Таким образом,
в точке М. Таким образом,
 .
.
Обращаясь теперь к чертежу (рис.6), находим, что проекции векторов  и на оси
и на оси  будут равны:
будут равны:

 ,
,
где v и v1 - численные величины скорости точки в моменты t и t1.
Следовательно,
 .
.
Заметим что при  точка М1 неограниченно приближается к М и одновременно
точка М1 неограниченно приближается к М и одновременно  .
.
Тогда, учитывая, что в пределе  , получим для
, получим для  выражение
выражение
 .
.
Правую часть выражения аn преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на  . Тогда будем иметь
. Тогда будем иметь
 ,
,
так как пределы каждого из стоящих в скобке сомножителей при равны:

Окончательно получаем:
 .
.
Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s no времени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю (аb=0). Эти результаты выражают собою одну из важных теорем кинематики точки.
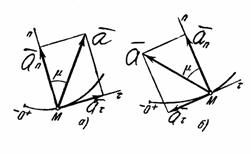
Отложим вдоль касательной и главной нормали Мn векторы  и
и  , численно равные и an (рис. 6). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a„ всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис. 6, а и б).
, численно равные и an (рис. 6). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a„ всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис. 6, а и б).
Вектор ускорения точки изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:
изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:
 .
.
Пользуясь полученными результатами, рассмотрим некоторые частные случаи движения точки.
1) Прямолинейное движение. Если траекторией точки является прямая линия, то  . Тогда
. Тогда  и все ускорение точки равно одному только касательному ускорению:
и все ускорение точки равно одному только касательному ускорению:
 .
.
Так как в данном случае скорость изменяется только численно, то отсюда заключаем, что касательное ускорение характеризует изменение скорости по численной величине.
2) Равномерное криволинейное движение. Равномерным называется такое криволинейное движение точки, в котором численная величина скорости все время остается постоянной:
v = const. Тогда  и все ускорение точки равно одному только нормальному:
и все ускорение точки равно одному только нормальному:
 .
.
Вектор ускорения направлен при этом все время по нормали к траектории точки.
Так как в данном случае ускорение появляется только за счет изменения направления скорости, то отсюда заключаем, что нормальное ускорение характеризует изменение скорости по направлению. Найдем закон равномерного криволинейного движения.
Из формулы  имеем
имеем  .
.
Пусть в начальный момент (t=0) точка находится от начала отсчета на расстоянии s0. Тогда, беря от левой и правой части равенства определенные интегралы в соответствующих пределах, получим
 или
или  ,
,
так как v=const. Окончательно находим закон равномерного криволинейного движения в виде
 .
.
Если s0=0, то s даст путь, пройденный точкой за время t. Следовательно, при равномерном движении путь, пройденный точкой, расчет пропорционального времени, а скорость движения равна отношению пути ко времени
 .
.
3) Равномерное прямолинейное движение. В этом случае  , а значит и а=0. Заметим, что единственным движением, в котором ускорение точки все время равно нулю, является равномерное прямолинейное движение.
, а значит и а=0. Заметим, что единственным движением, в котором ускорение точки все время равно нулю, является равномерное прямолинейное движение.
4) Равнопеременное криволинейное движение. Равнопеременным называется такое криволинейное движение точки, при котором касательное ускорение остается все время величиною постоянной:  . Найдем закон этого движения, считая, что при t=0: s=s0, а v=v0, где v0 - начальная скорость точки. Согласно формуле
. Найдем закон этого движения, считая, что при t=0: s=s0, а v=v0, где v0 - начальная скорость точки. Согласно формуле  имеем
имеем  .
.
Так как , то, беря от обеих частей последнего равенства интегралы в соответствующих пределах, получим:
 .
.
Формулу представим в виде
 или
или  .
.
Вторично интегрируя, найдем закон равнопеременного криволинейного движения точки в виде
 .
.
Если при криволинейном движении точки модуль скорости возрастает, то движение называется ускоренным, а если убывает - замедленным.