Вектор скорости точки
Рис.4
Рис.3
Рис.1
При движении точки М вектор  будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента
будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента  :
:
 .
.
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т.е. годограф этого вектора, определяет траекторию движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.1), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости
 ,
,  ,
,  .
.
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
Чтобы получить уравнение траектории надо из уравнений движения исключить параметр  .
.
Нетрудно установить зависимость между векторным и координатным способами задания движения.
Разложим вектор на составляющие по осям координат:

где  - проекции вектора на оси;
- проекции вектора на оси;  – единичные векторы направленные по осям, орты осей.
– единичные векторы направленные по осям, орты осей.
Так как начало вектора находится в начале координат, то проекции вектора будут равны координатам точки M. Поэтому

Пример 1.Движение точки задано уравнениями


Чтобы исключить время, параметр t, найдём из первого уравнения  из второго
из второго  Затем возведём в квадрат и сложим. Так как
Затем возведём в квадрат и сложим. Так как  получим
получим  Это уравнение эллипса с полуосями 2 см и 3 см (рис.2).
Это уравнение эллипса с полуосями 2 см и 3 см (рис.2).
Начальное положение точки M0 (при t=0) определяется координатами 

Рис.2Через 1 сек. точка будет в положении M1 с координатами

Примечание.
Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы. При необходимости, с заданием движения цилиндрическими и сферическими координатами можно познакомиться по учебникам.
3. Естественный способ задания движения точки.
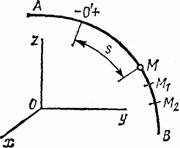
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.3) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О' до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2,... . следовательно, расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость
 .
.
Уравнение выражает закон движения точки М вдоль траектории.
Пример 2. Точка движется по прямой линии, по закону  (рис. 4).
(рис. 4).

В начале движения, при  Положение точки M0 называется начальным положением. При
Положение точки M0 называется начальным положением. При 
Конечно, за 1 сек. точка прошла расстояние M0M1=2 см. Так что s – это не путь пройденный точкой, а расстояние от начала отсчёта до точки.
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки.
Известно, что при движении точки по прямой линии с постоянной скоростью, равномерно, скорость её определяется делением пройденного расстояния s на время:  . При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
. При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
