Условия равновесия произвольной плоской системы сил. Случай параллельных сил.
Рис.28
Рис.27
Приложим к этой точке две уравновешивающиеся силы  и
и  , параллельные силе
, параллельные силе  и равные ей по величине:
и равные ей по величине: 
В результате получим силу  , приложенную к точке О. То есть мы как бы перенесли заданную силу из точки А в точку О, но при этом появилась пара, образованная силами и . Момент этой пары
, приложенную к точке О. То есть мы как бы перенесли заданную силу из точки А в точку О, но при этом появилась пара, образованная силами и . Момент этой пары  , равен моменту заданной силы относительно точки О.
, равен моменту заданной силы относительно точки О.
Этот процесс замены силы равной ей силой и парой называется приведением силы к точке О.
Точка О называется точкой приведения; сила , приложенная к точке приведения, – приведённой силой. Появившаяся пара – присоединённой парой.
Приведение плоской системы сил к данному центру.
Пусть на твердое тело действует какая-нибудь система сил  ,
,  , …,
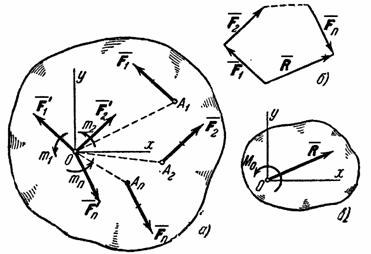
, …,  , лежащих в одной плоскости. Возьмем в этой плоскости произвольную точку О, которую назовем центром приведения, и, перенесем все силы в центр О (рис. 28, а). В результате на тело будет действовать система сил
, лежащих в одной плоскости. Возьмем в этой плоскости произвольную точку О, которую назовем центром приведения, и, перенесем все силы в центр О (рис. 28, а). В результате на тело будет действовать система сил  приложенных в центре О, и система пар, моменты которых будут равны:
приложенных в центре О, и система пар, моменты которых будут равны: 
Силы, приложенные в центре О, можно заменить одной силой  ,приложенной в том же центре; при этом
,приложенной в том же центре; при этом  или
или 
Точно так же, по теореме о сложении пар, все пары можно заменить одной парой, лежащей в той же плоскости. Момент этой пары  или
или 
Величина, равная геометрической сумме всех сил системы, называется, как известно, главным вектором системы; величину Мо, равную сумме моментов всех сил системы относительно центра О, будем называть главным моментом системы относительно центра О. В результате мы доказали следующую теорему: всякая плоская система сил, действующих на абсолютно твердое тело, при приведении к произвольно взятому центру О заменяется одной силой R, равной главному вектору системы и приложенной в центре приведения О, и одной парой с моментом М0, равным главному моменту системы относительно центра О (рис. 28, в).
Для равновесия любой плоской системы сил необходимо и достаточно, чтобы одновременно выполнялись условия: R = 0, M0 = 0.
Здесь О - любая точка плоскости.
Найдем вытекающие из равенств аналитические условия равновесия.
Величины R и Мо определяются равенствами:
где 
 Но R может равняться нулю только тогда, когда одновременно Rx = 0 и Ry = 0. Следовательно, условия будут выполнены, если будет:
Но R может равняться нулю только тогда, когда одновременно Rx = 0 и Ry = 0. Следовательно, условия будут выполнены, если будет:



Равенства выражают, следующие аналитические условия равновесия: для равновесия произвольной плоской системы сил, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
Теорема о трех моментах. Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы моментов этих сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю.
 ;
;  ;
; 