Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от её радиуса-вектора по времени.
Вектор скорости точки в данный момент времени равен первой производной от её радиуса-вектора по времени. Вектор скорости направлен по касательной к траектории данной точки в сторону движения.
Ускорение точки в векторной форме.
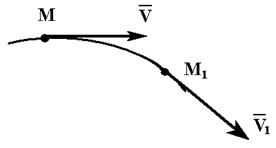
Пусть точка движется по криволинейной траектории. В момент времени
 ,
,

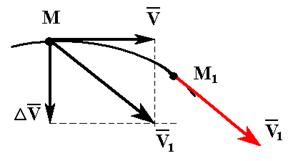
Перенесём вектор  параллельно самому себе в точку М и построим параллелограмм, у которого сторона
параллельно самому себе в точку М и построим параллелограмм, у которого сторона  , а диагональ
, а диагональ  . Тогда, очевидно, что другой стороной будет DV.
. Тогда, очевидно, что другой стороной будет DV.
Отношение приращения вектора скорости к тому промежутку времени, за который это приращение произошло, называется вектором среднего ускорения. Направление такое же, как у  .
.

Ускорение в данный момент времени равно пределу


Если точка движется по прямолинейной траектории, то вектор ускорения направлен по этой прямой.
Если точка движется по криволинейной траектории (плоской), то вектор ускорения направлен в сторону вогнутости кривой.
1.2. Координатный способ задания движения точки.
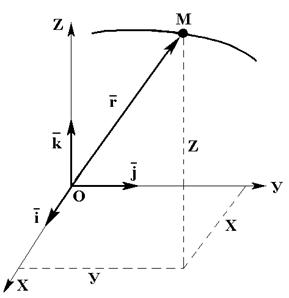
Положение точки в пространстве и на траектории однозначно определяется тремя координатами x, y, z.
При движении точки координаты будут меняться в зависимости от времени.

 x = f1 (t)
x = f1 (t)
y = f2 (t) - закон движения точки
z = f3 (t) в координатной форме.
Определение траектории точки.
Если t принять за параметр в уравнениях, выражающих закон движения, то эти уравнения будут представлять собой уравнения траектории в параметрической форме. Чтобы получить уравнение траектории в координатной форме надо исключить параметр t .
Пример:
x = 2 t
y = 4 t2 – 1
t1 = 1 c.
________________
x = ¦(y)

Траектория – парабола:

Определение скорости точки при координатном способе задания
её движения.
 Положение точки на траектории одно-
Положение точки на траектории одно-
значно определяется радиус-вектором
или тремя декартовыми координатами.
Координаты можно рассматривать как
проекции данного радиуса-вектора на
 оси. Построим единичные векторы дан-
оси. Построим единичные векторы дан-


 ной системы –
ной системы –  Разложим радиус-вектор
Разложим радиус-вектор  по осям координат:
по осям координат:
 |  | ||||
 | |||||
 Определяем скорость точки как производную от радиуса-вектора
Определяем скорость точки как производную от радиуса-вектора  .
.
 - const, так как система осей неподвижна.
- const, так как система осей неподвижна.
Разложим вектор  по осям координат:
по осям координат:

Учитывая, что вектор может быть разложен единственным образом по данным осям, приравниваем коэффициенты при одинаковых ортах.





Определение ускорения точки.
Аналогично определяем ускорение точки.




Пример:
Дано: x = 2t см; y =4t2 – 1 см t1 = 1c.
 Найти: Vx; Vy; Va;
Найти: Vx; Vy; Va;
Vx = x/ = (2t)/ = 2.1 =2 см/с
Vy = y/ = (4t2 -1)/ = 4.2.t -0 = 8t см/c
 см/с
см/с
ax = х// = 0 см/с2
ay = y// = 8 см/с2

 см/с2
см/с2
 см/с2
см/с2
 см
см
1.3. Естественный способ задания движения точки.
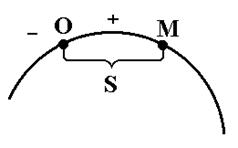
Чтобы задать движение точки естественным
способом необходимо:
- знать траекторию движения;
- знать начало отсчёта и + и – направление
отсчёта;
- знать закон движения точки по траектории в виде S = f (t); S– криволинейная координата.
Определение скорости точки.
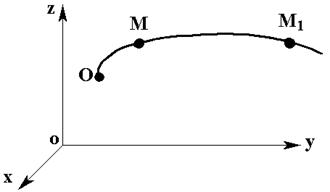
Точка движется по криволинейной траектории.
В момент t – M (S),
t1 = t + Dt – M1(S1);
S1 = S + DS.



Скорость при естественном способе задания движения равна первой производной от криволинейной координаты движения точки по времени. Знак производной указывает направление вектора скорости.
Кривизна и радиус кривизны.
Возьмём на некоторой кривой две точки А и В.
Проведём через эти точки касательные. Угол между этими касательными называется углом смежности Δφ.