Теорема о сложении скоростей
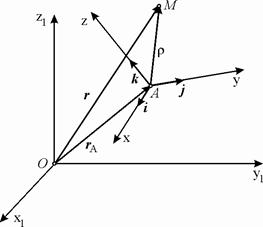 Рис. 7.1.
Рис. 7.1.
| Выбирая систему координат Oxly1z1 за основную, предположим, что система координат Ахуz движется по отношению к основной системе произвольным образом (рис. 7.1). Скорость произвольной точки М по отношению к основной системе координат называется абсолютной скоростью. |
Скорость  точки по отношению к подвижной системе координат называется относительной скоростью. Переносной скоростью
точки по отношению к подвижной системе координат называется относительной скоростью. Переносной скоростью  точки называется скорость той точки подвижной системы координат, с которой в данный момент совпадает движущаяся точка.
точки называется скорость той точки подвижной системы координат, с которой в данный момент совпадает движущаяся точка.
Если радиус-вектор  определяет положение точки М по отношению к системе координат Ох1у1z1, радиус-вектор
определяет положение точки М по отношению к системе координат Ох1у1z1, радиус-вектор  определяет положение начала системы координат Ахуz в системе Ох1у1z1, а радиус-вектор
определяет положение начала системы координат Ахуz в системе Ох1у1z1, а радиус-вектор  определяет положение точки М в системе координат Ахуz, то в соответствии с рис. 7.1 имеем
определяет положение точки М в системе координат Ахуz, то в соответствии с рис. 7.1 имеем
 . (7.6)
. (7.6)
Пусть координаты точки в подвижной системе координат будут х, у и z; тогда  ,
,
где i, j, k – единичные векторы осей подвижной системы координат.
По определению абсолютная производная радиуса-вектора по времени будет абсолютной скоростью точки. Следовательно, дифференцируя равенство (7.6) по времени, найдем абсолютную скорость точки
 . (7.7)
. (7.7)
Так как вектор  определен в подвижной системе координат, то для нахождения абсолютной производной от него воспользуемся формулой (7.5):
определен в подвижной системе координат, то для нахождения абсолютной производной от него воспользуемся формулой (7.5):
 , (7.8)
, (7.8)
где  – угловая скорость подвижной системы координат, а
– угловая скорость подвижной системы координат, а
представляет собой относительную производную от по времени. Согласно определению это будет относительная скорость точки, т.е.
 . (7.9)
. (7.9)
Подставляя выражения (7.8) и (7.9) в соотношение (7.7), получим
 , (7.10)
, (7.10)
где  – скорость начала подвижной системы координат по отношению к основной.
– скорость начала подвижной системы координат по отношению к основной.
Для определения переносной скорости точки закрепим ее в подвижной системе координат, т.е. положим в формуле (7.10)  , тогда получим
, тогда получим
 . (7.11)
. (7.11)
Таким образом, имеем
 , (7.12)
, (7.12)
т. е. абсолютная скорость точки равна геометрической сумме переносной и относительной скоростей.