Ускорения точек тела, имеющего одну неподвижную точку
Задание движения. Углы Эйлера
Движение тела, имеющего одну неподвижную точку, называют сферическим движением или вращением тела вокруг неподвижной точки.
 Рис. 6.1.
Рис. 6.1.
| Твердое тело с одной закрепленной точкой имеет три степени свободы. Положение такого тела относительно неподвижной системы координат Ox1y1z1 (рис. 6.1), как правило, определяют при помощи углов Эйлера, которые вводятся следующим образом. |
Свяжем жестко с телом подвижную систему координат Охуz, выбрав начало координат в неподвижной точке О (рис. 6.1). Координатная плоскость хОу пересекается с неподвижной плоскостью x1Oy1 вдоль прямой ОК, которая называется линией узлов. Угол, составляемый неподвижной осью Ox1 с линией узлов, называется углом прецессии и обозначается буквой  . Угол, составляемый линией узлов с подвижной осью Ох, носит название угла собственного вращения и обозначается буквой
. Угол, составляемый линией узлов с подвижной осью Ох, носит название угла собственного вращения и обозначается буквой  . Угол между осями Oz1 и Оz называется углом нутации и обозначается буквой
. Угол между осями Oz1 и Оz называется углом нутации и обозначается буквой  . Все углы отсчитываются соответственно от осей Ox1, ОК и Oz1 против хода часовой стрелки, как показано на рис. 6.1.
. Все углы отсчитываются соответственно от осей Ox1, ОК и Oz1 против хода часовой стрелки, как показано на рис. 6.1.
Покажем, что, зная три функции  ,
,  и
и  , можно всегда найти положение системы координат Охуz, а следовательно, и положение тела, скрепленного с ней. Действительно, откладывая от оси Ох1 угол прецессии , мы найдем линию узлов ОК. Проведем через точку О плоскость, перпендикулярную линии узлов, и от оси Оz1 (эта ось должна лежать в построенной плоскости) отложим угол нутации . Таким образом, будет определено положительное направление оси Оz. Через точку О проведем плоскость, перпендикулярную оси Оz; эта плоскость пройдет через линию узлов ОК. Отложим теперь в построенной плоскости от линии узлов угол собственного вращения и определим положительное направление оси Ох. Ось Оу должна лежать в той же плоскости и составлять вместе с осями Ох и Оz правую систему координат. Таким образом, углы
, можно всегда найти положение системы координат Охуz, а следовательно, и положение тела, скрепленного с ней. Действительно, откладывая от оси Ох1 угол прецессии , мы найдем линию узлов ОК. Проведем через точку О плоскость, перпендикулярную линии узлов, и от оси Оz1 (эта ось должна лежать в построенной плоскости) отложим угол нутации . Таким образом, будет определено положительное направление оси Оz. Через точку О проведем плоскость, перпендикулярную оси Оz; эта плоскость пройдет через линию узлов ОК. Отложим теперь в построенной плоскости от линии узлов угол собственного вращения и определим положительное направление оси Ох. Ось Оу должна лежать в той же плоскости и составлять вместе с осями Ох и Оz правую систему координат. Таким образом, углы  и полностью определяют положение осей подвижной системы.
и полностью определяют положение осей подвижной системы.
6.2. Распределение скоростей точек твердого тела,
имеющего одну неподвижную точку. Мгновенная ось вращения. Мгновенная угловая скорость
 Рис.6.2.
Рис.6.2.
| Пусть твердое тело имеет одну неподвижную точку О. Свяжем жестко с телом систему координат Охуz (рис. 6.2). Система координат Охуz однозначно определяет положение рассматриваемого тела по отношению к неподвижной системе отсчета Ох1y1z1. Положение произвольной точки твердого тела определяется |
радиусом-вектором  . Если х, у и z – координаты точки М в подвижной системе координат, a i,j и k – единичные векторы осей этой системы координат, то радиус-вектор можно представить в виде
. Если х, у и z – координаты точки М в подвижной системе координат, a i,j и k – единичные векторы осей этой системы координат, то радиус-вектор можно представить в виде
 . (6.1)
. (6.1)
В подвижной системе отсчета координаты х, у, z точки М являются постоянными величинами, т.е.  ,
,  ,
,  , а единичные векторы i, j, kбудут функциями времени, так как система координат Охуz движется вместе с твердым телом.
, а единичные векторы i, j, kбудут функциями времени, так как система координат Охуz движется вместе с твердым телом.
Дифференцируя (6.1) по  , получим скорость точки М
, получим скорость точки М
 . (6.2)
. (6.2)
Умножая обе части равенства (6.2) скалярно на i, j и k, получим
 (6.3)
(6.3)
Так как векторы i, j и k взаимно перпендикулярны, то
 (6.4)
(6.4)
Дифференцируя эти равенства по времени, найдем две группы формул:
 (6.5)
(6.5)
 (6.6)
(6.6)
Выражения (6.3) при этом примут вид
 (6.7)
(6.7)
Формулы (6.7) содержат три скалярные функции времени,
 ,
,
для которых введем обозначения:
 . (6.8)
. (6.8)
Перепишем теперь формулы (6.7) в виде
 (6.9)
(6.9)
Так как  ,
,
то, в соответствии с выражением (6.9), имеем
 .
.
Если теперь ввести вектор  с проекциями
с проекциями 
 ,
,
то скорость точки можно представить векторным произведением
 .
.
Итак, скорость точки тела, совершающего сферическое движение, определяется формулой
 . (6.10)
. (6.10)
Геометрическое место точек, скорость которых равна нулю, определяется из уравнения
 , (6.11)
, (6.11)
представляющего собой условие коллинеарности векторов и . Это векторное уравнение в системе координат Охуz можно записать в виде
 . (6.12)
. (6.12)
Уравнения (6.12) определяют прямою линию, направляющие косинусы которой пропорциональны проекциям вектора . В общем случае вектор и его проекции являются функциями времени, поэтому положение прямой (6.12) изменяется как относительно тела, так и относительно неподвижной системы координат Ох1y1z1.
Прямая (6.12), в каждой точке которой скорости точек тела в данный момент равны нулю, называется мгновенной осью вращения. (Она также называется мгновенной осью скоростей.)
Введенный нами вектор направлен по мгновенной оси вращения.
Как уже было установлено, скорость любой точки М тела определяется формулой (6.10), совпадающей по своей форме с выражением для скоростей точек твердого тела, вращающегося вокруг неподвижной оси с угловой скоростью . Следовательно, скорости точек твердого тела, имеющего одну неподвижную точку, распределяются так, как если бы тело вращалось вокруг оси, совпадающей в данный момент с мгновенной осью вращения. В частности, модуль скорости точки М в данный момент определяется равенством  ,
,
где  – расстояние от точки М до мгновенной оси вращения. Скорость точки М направлена перпендикулярно плоскости, проходящей через ее радиус-вектор и мгновенную ось вращений (рис. 6.3).
– расстояние от точки М до мгновенной оси вращения. Скорость точки М направлена перпендикулярно плоскости, проходящей через ее радиус-вектор и мгновенную ось вращений (рис. 6.3).
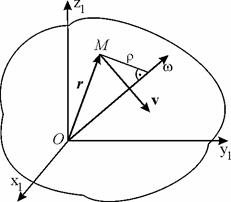 Рис. 6.3.
Рис. 6.3.
| По аналогии с вращением тела вокруг неподвижной оси назовем в рассматриваемом нами случае сферического движения тела вектор вектором угловой скорости. При этом следует иметь в виду, что при вращении тела вокруг неподвижной оси вектор угловой скорости представляет собой вектор,
|
всегда направленный по неподвижной оси вращения и характеризующий изменение во времени реального угла поворота тела. Для тела, имеющего одну неподвижную точку, выражение «угловая скорость» имеет условный характер, т.к. положение тела определяется не одним, а тремя углами и, следовательно, нет такого одного угла, скорость изменения которого представил бы введенный вектор . Кроме того, этот вектор может меняться и по модулю и по направлению. Проекции этого вектора на координатные оси являются функциями углов Эйлера и их первых производных.
Отметим, что из формул (6.8) для случая вращения твердого тела вокруг неподвижной оси, например, вокруг оси Oz, можно получить
 ,
,
т.к.  ,
,  ,
,  .
.
Если известны направления скоростей двух точек тела, то мгновенную ось вращения можно найти графически. Как следует из картины распределения скоростей точек тела в данный момент времени, мгновенная ось вращения лежит в плоскости, перпендикулярной направлению скорости точки тела, и проходит через неподвижную точку тела. Следовательно, если через точки тела, направления скоростей которых известны, провести плоскости, перпендикулярные этим скоростям, то линия пересечения этих плоскостей и будет мгновенной осью вращения.
Мгновенную ось вращения можно определить и в том случае, когда известна одна точка тела, скорость которой в данный момент времени равна нулю. Соединяя эту точку с неподвижной точкой тела, найдем мгновенную ось вращения.
Положение точки М тела в неподвижной системе координат определяется координатами х1, y1, и z1 а вектор имеет проекции  . Тогда, в соответствии с формулой (6.10), проекции скорости точки М на неподвижные оси координат будут
. Тогда, в соответствии с формулой (6.10), проекции скорости точки М на неподвижные оси координат будут
 (6.13)
(6.13)
Уравнение мгновенной оси вращения в неподвижной системе координат имеет вид
 . (6.14)
. (6.14)
Геометрическое место мгновенных осей вращений, построенных в неподвижной системе координат, называется неподвижным аксоидом, а в подвижной системе координат – подвижным аксоидом.
Из уравнений (6.14) следует
 .
.
Полученные уравнения дают уравнение неподвижного аксоида в параметрическом виде; параметром служит время t. Исключая из этих уравнений t, можно получить уравнение конической поверхности (неподвижного аксоида)  .
.
Аналогично, исключая время t из уравнений
 ,
,
полученных из формул (6.12), найдем уравнение подвижного аксоида
 .
.
Введем прежде всего понятие углового ускорения. Угловым ускорением называется производная угловой скорости по времени, т.е.
 . (6.15)
. (6.15)
 Рис. 6.4.
Рис. 6.4.
| Из определения видно, что вектор углового ускорения можно рассматривать как скорость конца вектора (рис. 6.4). Угловое ускорение  направлено по касательной к годографу вектора угловой скорости (рис. 6.4), поэтому его направление может быть каким угодно в зависимости от закона изменения направлено по касательной к годографу вектора угловой скорости (рис. 6.4), поэтому его направление может быть каким угодно в зависимости от закона изменения
|
вектора угловой скорости. Заметим попутно, что годограф вектора угловой скорости – кривая, лежащая на неподвижном аксоиде (рис. 6.4).
Перейдем теперь к определению ускорения произвольной точки тела. Исходя из определения ускорения и используя равенство (6.10), получим
 .
.
Но  , а
, а  ,
,
следовательно,
 . (6.16)
. (6.16)
Таким образом, ускорение  может быть представлено как сумма двух ускорений:
может быть представлено как сумма двух ускорений:  и
и  .
.
Ускорение  называется вращательной составляющей ускорения. Модуль этого ускорения равен
называется вращательной составляющей ускорения. Модуль этого ускорения равен
 ,
,
где  – расстояние от точки М до вектора . Направлено это ускорение перпендикулярно плоскости векторов и в ту сторону, откуда кратчайший переход от вектора к вектору виден против хода часовой стрелки. Заметим, что вследствие несовпадения направлений угловой скорости и углового ускорения вращательная составляющая ускорения может быть направлена по отношению к направлению скорости под любым углом, оставаясь перпендикулярной вектору . В этом существенное различие между вращением твердого тела вокруг неподвижной оси и движением тела, имеющего одну неподвижную точку.
– расстояние от точки М до вектора . Направлено это ускорение перпендикулярно плоскости векторов и в ту сторону, откуда кратчайший переход от вектора к вектору виден против хода часовой стрелки. Заметим, что вследствие несовпадения направлений угловой скорости и углового ускорения вращательная составляющая ускорения может быть направлена по отношению к направлению скорости под любым углом, оставаясь перпендикулярной вектору . В этом существенное различие между вращением твердого тела вокруг неподвижной оси и движением тела, имеющего одну неподвижную точку.
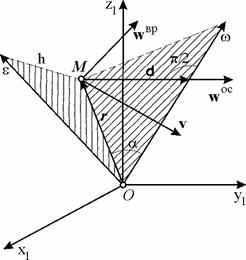 Рис. 6.5.
Рис. 6.5.
| Ускорение направлено по перпендикуляру к плоскости векторов и  , т.е. по направлению вектора d (рис. 6.5), имеющего начало в точке М и конец в основании перпендикуляра, опущенного из точки М на мгновенную ось вращения. Модуль векторного произведения равен , т.е. по направлению вектора d (рис. 6.5), имеющего начало в точке М и конец в основании перпендикуляра, опущенного из точки М на мгновенную ось вращения. Модуль векторного произведения равен  ,
т.к. ,
т.к.  . .
|
Следовательно, можно записать
 . (6.17)
. (6.17)
Это ускорение называется осестремительной составляющей ускорения.
Итак, ускорение любой точки тела равно сумме вращательной и осестремительной составляющих ускорения
 . (6.18)
. (6.18)