Групповые взаимодействия мышц
Рйс. 14
Результат тяги мышцы (М):
а — при верхней опоре, О — при нижней опоре,
в — без опоры, г — при фиксации антагонистами
Физиологические условия проявления тяги мышцы восновном можно свести к ее возбуждению и утомлению. Эти два фактора отражаются на возможностях мышцы, повышая или снижая ее силу тяги.
Величина силы тяги мышцы связана с быстротой ее продольной деформации. С увеличением скорости сокращения мышцы при преодолевающей работе ее сила тяги уменьшается. При уступающей же работе увеличение скорости растягивания мышцы увеличивает ее силу тяги. Это очень важно для оценки силы тяги мышцы при быстрых движениях.
Действие мышцы в биокинематических цепях в нормальных ус
ловиях никогда не бывает, изолированным. Мышцы участвуют в
движениях группами, при сложном взаимодействии как между груп
пами, так и внутри их. '■"'>;
. Рабочие и опорные тяги мышц
Рабочие тяги мышц (динамическая работа) обусловливают выполнение движений, а опорные тяги мышц (статическая работа) создают необходимые условия для этого.
Мышцы, осуществляющие движения подвижных звеньев, обеспечивающие активные движения, создают рабочие тяги. Эти мышцы изменяют свою длину, сокращаются при преодолевающей работе и_ растягиваются при уступающей.
Для выполнения движений как при опоре, так и без опоры (полетные фазы прыжка, бега и т. п.) необходимо создавать опору для раоотающих мышц, звенья тела, соприкасающиеся с опорой — опорные звенья, сохраняют свое положение и связь с ней (например, в висе, рис. 20) благодаря опорным тягам мышц. Это статическая работа, фиксирующая суставы. Кроме того, фиксируются те или иные звенья тела, что создает опору для мышц, выполняющих динамическую работу. Получается в целом своего рода фундамент для подвижных звеньев, движущихся относительно друг друга и относительно опорных звеньев.Таким образом, все ,мышцы, участвующие в двигательных действиях, работают либо статически, либо динамически. Эти виды работы зависят друг от друга. В движениях, требующих значительных рабочих тяг, обычно бывают значительными и опорные тяги.
. Биодинамически полносвязный механизм
Мышцы, окружающие сустав, функционируют, образуя совместно функциональные группы: а) совместного действия — синергисты и б) противоположного действия — антагонисты. Их согласованная тяга превращает неодноосный сустав в биодинамически полносвязный механизм с определенным направлением движения и скоростью звена.
Мышцы-антагонисты, участвуя в движениях, выполняют уступающую работу; растягиваясь, они тормозят движение. Если действие их тяги становится равно действию синергистов, то в-случае прекращения движения они становятся мышцами-фиксаторами положения того звена, к которому приложены их тяги.
Синергизм и антагонизм в работе мышц относительны. Так, противоположно направленные составляющие мышц-синергистов можно рассматривать как взаимно антагонистические. В свою очередь, совместная тяга синергистов и их антагонистов обеспечивает заданный эффект, значит, они в известной степени проявляют синергизм.
Практическая эффективность может достигать значений 40- 60 % для различных типов мышц.
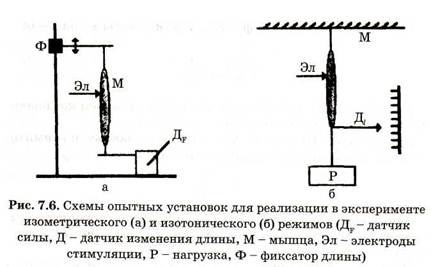
Дополнение. Активное сокращение мышц: методики исследования.
Для исследования характеристик сокращающихся мышц используют два искусственных режима:
1. Изометрический режим, при котором длина мышцы постоянна L= conct , регистрируется развиваемая сила.F( t ) .
2. Изотонический режим, при котором мышца поднимает постоянный груз при Р= conct , а регистрируется изменение ее длины во времени: L (t ) .
Схемы опытных установок приведены на рис
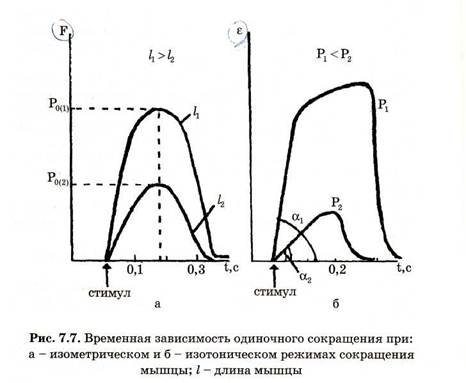
При изометрическом режиме с помощью фиксатор ( рис. ) предварительно устанавливают длину мышцы L . После установки длины на электроды Э подается электрический стимул и с помощью датчика регистрируется функция F(t) Вид этой функции в изометрическом режиме для двух различных длин представлен на рис .
|

|
Максимальная сила Ро, которую может развивать мышца, зависит от ее начальной длины и области перекрытия актиновых и миозиновых нитей, в которой могут замыкаться мостики: при начальной длине саркомера 2,2 мкм в сокращении участвуют все мостики (см. рис. ).
Поэтому максимальная сила генерируется тогда, когда мышца предварительно растянута на установке (рис. , а) так, чтобы длины ее саркомеров были близки к 2,2 мкм. На рис. 7.7, а это соответствует начальный длинам двух мышц 1г и 1Г Но так как количество мостиков в мышце lt больше, чем в 12 (^ > 12), то сила, генерируемая 1г больше.
При изотоническом режиме к незакрепленному концу мышцы подвешивают груз Р (рис. ). После этого подается стимул и регистрируется изменение длины мышцы во времени: Al(t). Вид этой функции в изотоническом режиме для двух различных нагрузок показан на рис. , б.
Как следует из рис. б, чем больше груз Р, тем меньше укорочение мышцы и короче время удержания груза. При некоторой нагрузке Р = Ро мышца совсем перестает поднимать груз; это значение Ро и будет максимальной силой изометрического сокращения для данной мышцы (рис. ).
Здесь важно отметить, что при увеличении нагрузки угол наклона восходящей части кривой изотонического сокращения уменьшается (рис. ): а2 < аг Другими словами скорость укорочения с ростом нагрузки падает.
|
.

|