Кинематический и силовой расчет привода.
¨ Определение КПД привода.
КПД рассчитаем по формуле:
 ,
,
где  - КПД муфты;
- КПД муфты;
 - КПД открытой зубчатой передачи;
- КПД открытой зубчатой передачи;
 - КПД редуктора.
- КПД редуктора.
 ,
,
где  - КПД закрытой зубчатой передачи;
- КПД закрытой зубчатой передачи;
 . – КПД подшипниковой пары качения
. – КПД подшипниковой пары качения
 .
.
Тогда общий КПД привода будет равен:

¨ Определение потребной мощности электродвигателя.
Рассчитаем потребную мощность электродвигателя по формуле:
 ,
,
где Р – мощность на барабане [кВт],
 кВт.
кВт.
Выберем двигатель со стандартной мощностью 15 кВт по ГОСТ 19523-81 (см. Приложение 6), тогда недогрузка будет составлять:

¨ Варианты подбора электродвигателя.
Представим двигатели с мощностью 15 кВт, имеющие разную частоту вращения, в виде таблицы 6.1.
Таблица 6.1.
 № п/п № п/п
| Тип элетродвигателя | nc, об/мин | S,% | nac, об/мин | UUприв | UUо.з.п. | UUред. | TmaxTном |
| 4А160S2У3 | 2,3 | 73,3 | 12,2 | 2,2 | ||||
| 4А160S4У3 | 2,7 | 36,5 | 6,08 | 2,2 | ||||
| 4А160М6У3 | 3,0 | 24,3 | 4,05 | 2,0 | ||||
| 4А180М2У3 | 2,6 | 18,3 | 3,05 | 2,2 |
 ,
,
где S - коэффициент скольжения,
nc - синхронная частота вращения электродвигателя (теоретическая),
nac – асинхронная частота вращения электродвигателя (реальная).
 ;
;
 ;
;
 ;
;
 ;
;
¨ Определение передаточных чисел элементов привода.
Общее передаточное число привода  определим по формуле:
определим по формуле:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Число оборотов в приводе понижают редуктор и открытая зубчатая передача, т.е.
 ,
,
где Uо.з.п. = 3…10 – передаточное число открытой зубчатой передачи,
 - передаточное число редуктора.
- передаточное число редуктора.
Назначаем Uо.з.п. = 6, тогда Uред. определим по формуле:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Сведем полученные результаты в таблицу 6.1.
¨ Окончательный выбор электродвигателя.
Критерии выбора электродвигателя:
1. Кинематическая точность (∆ Uред ≤ 4%);
2. Функциональная пригодность (2 ≤ Uред ≤ 6,3 – для одноступенчатого редуктора);
3. Стоимость (чем больше число оборотов на валу электродвигателя, тем он компактней и дешевле).
Для приводов общего машиностроения применяют электродвигатели с
nc = 1500 об/мин. и nc = 1000 об/мин.
Передаточные числа зубчатых передач (в частности редукторов) стандартизованы по ГОСТ 2185-66:
1-й предпочтительный ряд – 1,0; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0; 10,0; 12,5.
2-й ряд – 1,12; 1,4; 1,8; 2,24; 2,8; 3,5; 4,5; 5,6; 7,1; 9,0; 11,2.
Определим кинематическую точность для электродвигателей №2 и №3:
∆ Uред = │  │* 100%
│* 100%
∆ Uред 2 = 
 < 4%
< 4%
∆ Uред 3 =  < 4%
< 4%
По кинематической точности подходят оба рассматриваемых электродвигателя.
По функциональной пригодности также подходят электродвигатели №2 и №3. Отдадим предпочтение электродвигателю №3 с 
 = 4.0, тогда уточненное передаточное число открытой зубчатой передачи будет:
= 4.0, тогда уточненное передаточное число открытой зубчатой передачи будет:
¨ Расчет частоты вращения на валах привода.
Присвоим следующие индексы валам привода:
1 – ведущий вал редуктора;
2 - ведомый вал редуктора;
3 – ведущий вал открытой зубчатой передачи.
 ;
;
 ;
;
 об/мин;
об/мин;
 ;
;
 .
.
¨ Расчет мощности на валах привода.
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
¨ Определение крутящих моментов на валах привода.
Определим крутящие моменты по формуле:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
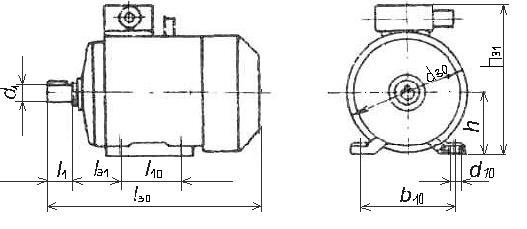 Представим эскиз и параметры выбранного электродвигателя:
Представим эскиз и параметры выбранного электродвигателя:
Рис. 6.2. Эскиз электродвигателя.