Упраление вектором тяги.
Для управления ЛА в полете двигатель имеет систему управления вектором тяги (УВТ). Система УВТ должна создавать относительно центра масс ЛА три момента: курса, тангажа и крена. Эти моменты можно создавать разными путями, выбор которых определяется требуемыми значениями моментов, а также принципиальной и конструктивной схемой двигателя.
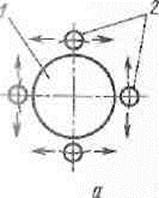
Наиболее распространенные схемы УВТ следующие. Двигатель однокамерный. Система УВТ здесь может быть в трех вариантах (рис.14). 1) основная камера — неподвижная; УВТ осуществляется четырьмя
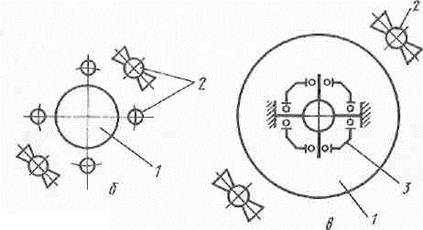
Рис.14. Схемы создания управляющих моментов системой УВТ при однокамерном двигателе:
а- основная камера - неподвижная, УВТ осуществляется четырьмя поворотными соплами или специальными рулевыми камерами; б - основная камера — неподвижная, УВТ осуществляется восемью неподвижными тоннами; в — основная камера установлена на карданном подвесе; г — перераспределение расхода газа; 1 — основная камера; 2 — рулевые сопла; 3-карданный подвес камеры; 4 -клапаны, перераспределяющие расход газа
поворотными соплами, работающими на отработанном в ТНА генераторном газе (рис.14, а). Эта схема легко обеспечивает получение всех трех моментов. Однако вследствие небольшой тяги реактивных сопел эта схема пригодна для управления только верхних ступеней РН, работающих практически в безвоздушном пространстве, и космических кораблей.
Если при такой схеме двигателя требуются большие моменты, например, для управления полетом первой ступени РН, то вместо поворотных сопел надо установить поворотные рулевые камеры. Последние работают на тех же компонентах, что и основная камера и могут питаться от основного ТНА. Поворачиваясь в специальных узлах крепления на угол до 45° они могут создавать значительные управляющие моменты;
2) основная камера - также неподвижная, но УВТ осуществляется восемью неподвижными соплами, работающими также на отработанном генераторном газе (см. рис.14, 6, г). Управляющие моменты создаются путем перераспределение расхода генераторного газа между различными соплами. Эта схема также пригодна только для верхних ступеней РН и космических кораблей;
3) основная камера устанавливается на карданном подвесе (рис.14,в). Такая камера, поворачиваясь в двух плоскостях, обеспечивает два наиболее значительных момента — курса и тангажа. Для управления креном, момент которого может быть значительно меньшим, чем два других, вполне достаточно двух-четырех сопел, работающих на генераторном газе. Вследствие того, что два главных момента здесь обеспечиваются тягой основной камеры, эта схема вполне пригодна и для первой ступени РН.
Двигатель многокамерный. В зависимости от числа камер схемы получения управляющих моментов могут быть разными (рис.15). Однако в любом случае эти схемы позволяют создавать все три управляющих момента, причем, значительной величины и наиболее просто. Это обстоятельство является важным аргументом в пользу многокамерных схем двигателей.
Вариантами схем УВТ являются:
1) четыре основные камеры, закрепленные в подвеске, позволяющей их качание на угол до 8 ... 10° в одной плоскости. Это "классическая" схема двигателя, спроектированная с учетом системы УВТ (рис.15,а);
2) пятикамерная блочная. Четыре боковых двигателя, как и в предыдущем случае, поворотные, а центральный — неподвижный. Это схема двигательной установки первой ступени РН "Сатурн-5" (рис.15, б):
3) восьмикамерная блочная. Четыре боковых двигателя — поворотные, а четыре внутренних — неподвижные. Это схема двигательной установки первой ступени РН "Сатурн" 1В" (рис.15,в).
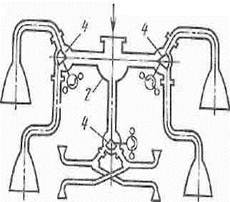
Многокамерная двигательная установка со специальными рулевыми камерами. На рис.15, г показана схема УВТ двигательной установки первой ступени РН "Восток" и его модификаций. Ракетоноситель состоит из четырех боковых и центрального блоков. Каждый блок снабжен четырехкамерными двигателями. Управляющие моменты создаются поворотными рулевыми камерами, которые питаются от основных ТНА: на боковых блоках установлено по две рулевые камеры с внешней стороны, а на центральном блоке, который после отделения боковых блоков становится второй ступенью, установлено четыре рулевые камеры по одной с каждой стороны.


Рис.15. Схемы создания управляющих моментов системой УВТ при многокамерных двигателях:
а — четыре основные камеры установлены на опорах, позволяющих им качаться в одной плоскости;
б) — пять камер, из которых центральная неподвижная, четыре боковых качаются в одной плоскости каждая;
в) — восемь камер, из них четыре центральные неподвижные, четыре боковые качаются;
г) - схема УВТ РН "Восток"; 1 — основная камера; 2 — рулевые двигатели
Вопросы для самопроверки:
1.Какие функции выполняет автоматика двигателя?
2.Назовите составные части двигателя, которые относятся к автоматике.
3.Как можно регулировать тягу двигателя?
4.Как можно регулировать соотношение компонентов двигателя?
5.Чем вызвана необходимость наддува баков?
6.Какие имеются схемы наддува баков?
7.Перечислите достоинства и недостатки систем подачи с бустерными насосами.
8.Какие имеются системы управления вектором тяги?