Регуляторы прямого действия
Рассмотрим схемы простейших регуляторов.
Один из первых в истории техники автоматических регуляторов был изобретён И. И. Ползуновым в 1765 году. Это был автоматический регулятор уровня воды в котле паровой машины (рис. 1.4). В нём осуществлён общий принцип действия любого автоматического регулятора прямого действия.
 Чувствительный элемент (поплавок), измеряющий регулируемый параметр (уровень воды в котле), непосредственно перемещает регулирующий орган (клапан питания котла водой). Регулирующим фактором в этом случае является площадь, перекрываемая заслонкой в трубопроводе подачи воды. Котёл является объектом регулирования. Изменение величины отбора пара из котла в паровую машину является возмущающим воздействием на объект регулирования.
Чувствительный элемент (поплавок), измеряющий регулируемый параметр (уровень воды в котле), непосредственно перемещает регулирующий орган (клапан питания котла водой). Регулирующим фактором в этом случае является площадь, перекрываемая заслонкой в трубопроводе подачи воды. Котёл является объектом регулирования. Изменение величины отбора пара из котла в паровую машину является возмущающим воздействием на объект регулирования.
Предположим, что отбор пара увеличится. Это приведёт к падению давления в котле, увеличению интенсивности парообразования и, следовательно, снижению уровня воды. Таким образом, уровень воды Н (регулируемый параметр) начнёт уменьшаться (рис. 1.5). Тогда поплавок, опускаясь, будет шире открывать регулирующий клапан, усилится приток питающей воды, и уровень её будет автоматически восстанавливаться.
 Следует отметить, что рассматриваемый регулятор прямого действия является статическим, т. е. в процессе регулирования происходит некоторое отклонение величины регулируемого параметра от ее заданного значения, называемое статической ошибкой (ΔНст- см. рис. 1.5). Так для рассмотренного случая увеличения отбора пара необходимо, чтобы в конце переходного процесса клапан питания котла водой занял новое установившееся положение, соответствующее увеличенному расходу жидкости через клапан. Последнее возможно только при увеличении площади проходного сечения. Так как заслонка клапана жестко связана с поплавком, отклонение положения заслонки на увеличение расхода приводит к снижению положения поплавка. То есть уровень воды в баке несколько понизится.
Следует отметить, что рассматриваемый регулятор прямого действия является статическим, т. е. в процессе регулирования происходит некоторое отклонение величины регулируемого параметра от ее заданного значения, называемое статической ошибкой (ΔНст- см. рис. 1.5). Так для рассмотренного случая увеличения отбора пара необходимо, чтобы в конце переходного процесса клапан питания котла водой занял новое установившееся положение, соответствующее увеличенному расходу жидкости через клапан. Последнее возможно только при увеличении площади проходного сечения. Так как заслонка клапана жестко связана с поплавком, отклонение положения заслонки на увеличение расхода приводит к снижению положения поплавка. То есть уровень воды в баке несколько понизится.
 Кроме изменения отбора пара, возмущающее воздействие на объект регулирования будет проявляться также и в изменении теплового режима котла (интенсивность топки, температура питающей воды и окружающего пространства). Регулятор во всех случаях будет действовать так, чтобы ликвидировать нежелательное отклонение уровня воды, по каким бы причинам оно не возникло. При этом во всех случаях будет иметь место статическая ошибка регулирования.
Кроме изменения отбора пара, возмущающее воздействие на объект регулирования будет проявляться также и в изменении теплового режима котла (интенсивность топки, температура питающей воды и окружающего пространства). Регулятор во всех случаях будет действовать так, чтобы ликвидировать нежелательное отклонение уровня воды, по каким бы причинам оно не возникло. При этом во всех случаях будет иметь место статическая ошибка регулирования.
Регулятор расхода топлива прямого действия поддерживает постоянный расход топлива, величина которого определяется положением дроссельного крана управления 1 (см. рис. 1.6). Постоянство расхода обеспечивается поддержанием постоянного перепада давления на дроссельном кране 1 (  ). Расход рабочего тела через дроссельный кран Gдк определяется по формуле:
). Расход рабочего тела через дроссельный кран Gдк определяется по формуле:
 , (1.1)
, (1.1)
где  - коэффициент расхода, Fдк – площадь дроссельного крана 1,
- коэффициент расхода, Fдк – площадь дроссельного крана 1,
 - плотность жидкости.
- плотность жидкости.
Постоянный перепад давления на дроссельном кране обеспечивается путем изменения степени дросселирования потока на входе в дроссельный кран за счет изменения положения регулирующего дифференциального клапана 2.
Предположим, что на входе в регулятор увеличилось давление Р1 жидкости, нагнетаемой насосным агрегатом. Это приведет к увеличению давления Р2, увеличению перепада давления на дроссельном кране управления ΔРдк и повышению расхода рабочего тела G согласно соотношению (1.1) относительно заданного. В то же время происходит увеличение давления в надпоршневой полости сервопоршня 3, связанной через канал с демпфирующим дросселем 4 с полостью перед дроссельным краном управления. Таким образом, на сервопоршне 3 происходит увеличение перепада давления между надпоршневой полостью и подпоршневой полостью, связанной каналом с выходом регулятора, что приводит к движению поршня вниз и уменьшению площади сечения регулирующего клапана.
Уменьшение площади сечения регулирующего клапана соответствует увеличению степени дросселирования жидкости на нем и уменьшению давления Р2 . Таким образом перепад давления на дроссельном кране управления восстанавливается, что обеспечивает снижение расхода рабочей жидкости до заданного значения.
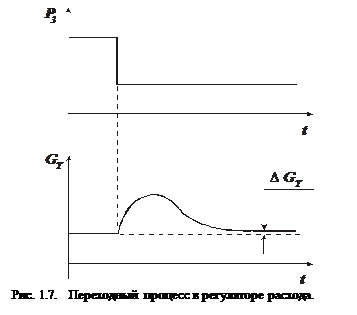 |
Как и в ранее рассмотренном случае регулятора Ползунова, регулятор расхода топлива является статическим, т. е. в процессе регулирования происходит некоторое отклонение величины регулируемого параметра от ее заданного значения (см. рис. 1.7).
В соответствии с терминологией, принятой в теории автоматического управления, в системе с регулятором расхода могут быть выделены:
ОР - двигатель;
РП - расход топлива;
РФ - положение регулирующего клапана Zкл;
ВВ - давление Р1, Р3;
ИМ - регулирующий клапан;
ЧЭ - сервопоршень.
Регулятор частоты вращения прямого действия предназначен для поддержания постоянной угловой скорости вращения ротора газотурбинного двигателя. Упрощенная принципиальная схема системы автоматического регулирования частоты вращения вала двигателя приведена на рис. 1.8.
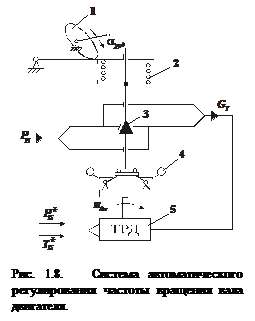 При установившейся частоте вращения сила настроечной пружины 2 регулятора равна силе центробежных грузиков 4. При этом дозирующая игла 3 занимает определенное положение в корпусе регулятора, обеспечивая подачу необходимого количества топлива к двигателю 5. Сила настроечной пружины 2 определяется положением программного кулачка 1.
При установившейся частоте вращения сила настроечной пружины 2 регулятора равна силе центробежных грузиков 4. При этом дозирующая игла 3 занимает определенное положение в корпусе регулятора, обеспечивая подачу необходимого количества топлива к двигателю 5. Сила настроечной пружины 2 определяется положением программного кулачка 1.
В данной системе:
ОР - двигатель;
РП - частота вращения ротора двигателя nдв;
РФ - расход топлива GТ;
ВВ - давление Рв* и температура Тв* воздуха на входе в двигатель;
ИМ - дозирующая игла;
ЧЭ - центробежные грузики.
Управляющим воздействием является угол поворота рычага управления программным кулачком  .
.
В рассмотренном регуляторе прямого действия дозирующая игла перемещается за счет усилия от чувствительного элемента (центробежных грузиков).
Предположим, что вследствие изменения каких-либо условий полёта уменьшилось полное давление воздуха на входе в двигатель. Это приводит к увеличению частоты вращения ротора двигателя. Центробежная сила грузиков, вращающихся со скоростью, пропорциональной частоте вращения ротора двигателя, также увеличивается. В этом случае шток дозирующей иглы будет передвигаться вверх, преодолевая силу настроечной пружины 2. Дозирующая игла прикрывает сечение клапана, в результате чего расход топлива в двигатель уменьшается. Это приводит к тому, что частота вращения ротора двигателя уменьшается и становится равной заданному значению. Характерный вид переходного процесса представлен на рис. 1.9.
 Регулятор – статический, так как для компенсации возмущающего воздействия требуется перезатяжка пружины и прикрытое положение клапана дозирующей иглы. Это возможно только при увеличенных оборотах двигателя (см. рис. 1.9).
Регулятор – статический, так как для компенсации возмущающего воздействия требуется перезатяжка пружины и прикрытое положение клапана дозирующей иглы. Это возможно только при увеличенных оборотах двигателя (см. рис. 1.9).