Оценка характеристик продольной статической управляемости.
В процессе выполнения курсовой работы определяются:
· балансировочные отклонения рычага управления в горизонтальном полете  ;
;
· балансировочные усилия на рычаге управления в горизонтальном полете  ;
;
· коэффициенты (градиенты) расхода рычага управления и усилий на единицу перегрузки в криволинейном полете в вертикальной плоскости  ,
,
которые затем сравниваются с нормируемыми значениями.
Статические характеристики продольной управляемости для данного типа самолета имеют следующие нормируемые значения:
для самолета 2 класса:
 мм/ед.пер.;
мм/ед.пер.;
 Н/ед.пер.;
Н/ед.пер.;
Знак " -" означает отклонение РУС "на себя".
Исходное уравнение балансировки в прямолинейном горизонтальном полете имеет вид:
 ,
,
где  (см. п.1.3).
(см. п.1.3).
Отсюда балансировочное отклонение руля высоты:
 ,
,
где  - см. п. 1.2.2.
- см. п. 1.2.2.
Далее определяют балансировочные отклонения рычага управления (РУС) и балансировочные усилия на нем по формулам:

 ,
,
 ,
,
где  - коэффициент передачи штурвала, рад/мм;
- коэффициент передачи штурвала, рад/мм;
 - коэффициент жесткости штурвала (для необратимых систем), Н/мм.
- коэффициент жесткости штурвала (для необратимых систем), Н/мм.
Коэффициенты расхода РУ и усилий на единицу перегрузки в криволинейном полете в вертикальной плоскости определяются по формулам:

где  - коэффициент расхода РВ на ед. перегрузки,
- коэффициент расхода РВ на ед. перегрузки,

Результаты расчета статических характеристик продольной управляемости сводят в таблицу, а также строят графики зависимостей характеристик продольной статической управляемости в рассматриваемом диапазоне высот и чисел М. Анализируя балансировочные кривые  ,
,  =f(М), оценивают достаточность диапазона отклонения ручки для балансировки самолета на расчетных высотах, а также делают вывод об устойчивости самолета по скорости (если
=f(М), оценивают достаточность диапазона отклонения ручки для балансировки самолета на расчетных высотах, а также делают вывод об устойчивости самолета по скорости (если  , то самолет устойчив по скорости в данном диапазоне чисел М).
, то самолет устойчив по скорости в данном диапазоне чисел М).
На графики  ,
,  наносят ограничения
наносят ограничения  (нормируемые значения для самолета данного класса) и делают выводы о соответствии градиентов расхода ручки и усилий требованиям задания.
(нормируемые значения для самолета данного класса) и делают выводы о соответствии градиентов расхода ручки и усилий требованиям задания.
Таблица 4. H=500м .
| M | q, н/ 
| Cyгп | Xбал, мм/ед.пер. | Pбал, Н/ед.пер. | Xn, мм/ед.пер. | Pn, Н/ед.пер. | δв бал, рад | δn, рад | mz дв |
| 0,3 | 6012,666 | 0,768919 | -22,8756 | -45,7512 | -20,2598 | -40,52 | -0,04804 | -0,04255 | |
| 0,4 | 10689,18 | 0,432517 | -11,2263 | -22,4525 | -11,451 | -22,902 | -0,02358 | -0,02405 | |
| 0,5 | 16701,85 | 0,276811 | -6,59068 | -13,1814 | -7,35771 | -14,715 | -0,0138 | -0,01545 | |
| 0,6 | 24050,66 | 0,19223 | -7,0553 | -14,1106 | -7,89026 | -15,781 | -0,01482 | -0,01657 | |
| 0,7 | 32735,63 | 0,14123 | -11,0585 | -22,1171 | -11,7498 | -23,5 | -0,02322 | -0,02467 | |
| 0,8 | 42756,74 | 0,108129 | -16,2728 | -32,5456 | -15,8203 | -31,641 | -0,03417 | -0,03322 |
H=4000м
| M | q, н/
| Cyгп | Xбал, мм/ед.пер. | Pбал, Н/ед.пер. | Xn, мм/ед.пер. | Pn, Н/ед.пер. | δв бал, рад | δn, рад | mz дв |
| 0,3 | 3883,233 | 1,190569 | -37,5222 | -75,0445 | -34,3043 | -68,6086 | -0,0788 | -0,07204 | |
| 0,4 | 6903,525 | 0,669695 | -19,4916 | -38,9833 | -19,3888 | -38,7776 | -0,04093 | -0,04072 | |
| 0,5 | 10786,76 | 0,428605 | -11,8977 | -23,7953 | -12,458 | -24,9161 | -0,025 | -0,02616 | |
| 0,6 | 15532,93 | 0,297642 | -12,4453 | -24,8906 | -13,109 | -26,218 | -0,02614 | -0,02753 | |
| 0,7 | 21142,05 | 0,218676 | -18,8019 | -37,6038 | -19,2846 | -38,5691 | -0,03948 | -0,0405 | |
| 0,8 | 27614,1 | 0,167424 | -26,4457 | -52,8914 | -25,7536 | -51,5072 | -0,05554 | -0,05408 |
H=7000м
| M | q, н/
| Cyгп | Xбал, мм/ед.пер. | Pбал, Н/ед.пер. | Xn, мм/ед.пер. | Pn, Н/ед.пер. | δв бал, рад | δn, рад | mz дв |
| 0,4 | 4603,772 | 1,004232 | -31,1499 | -62,2997 | -30,7091 | -61,418 | -0,0654 | -0,06449 | |
| 0,5 | 7193,393 | 0,642709 | -19,3831 | -38,7662 | -19,7321 | -39,464 | -0,0407 | -0,04144 | |
| 0,6 | 10358,49 | 0,446325 | -20,0479 | -40,0958 | -20,5373 | -41,075 | -0,0421 | -0,04313 | |
| 0,7 | 14099,05 | 0,327913 | -29,7239 | -59,4478 | -29,9947 | -59,989 | -0,0624 | -0,06299 | |
| 0,8 | 18415,09 | 0,251058 | -40,7944 | -81,5888 | -39,8595 | -79,719 | -0,086 | -0,0837 |
Вывод:
Эффективности рулей для балансировки самолета по тангажу не достаточно в расчетном диапазоне высот и скоростей полета. Для устранения неравномерности градиентов расходов и усилий на ручке необходимо установить АРУ.
1.4.3.Оценка динамических характеристик продольной устойчивости и управляемости.
Оценка производится методом накопления расчетных точек на области хорошей устойчивости и управляемости, которая соответствует PR≤3,5 ( от англ. “pilot rating” – оценка летчика) по десятибалльной шкале Купера-Харпера..
Определяются следующие характеристики переходного процесса по нормальной перегрузке в короткопериодическом движении:
- опорная частота недемпфированных колебаний ω0(H,M);
- относительный коэффициент затухания колебаний ξ0(Н,М);
- время срабатывания tср(H,M);
- относительный заброс перегрузки (относительное перерегулирование)
 .
.
Опорную частоту недемпфированных колебаний находят из выражения:
 ,
,
коэффициент демпфирования – из выражения:
 ,
,
где
Если самолет устойчив по углу атаки (по перегрузке), то есть при  , то для него определяют:
, то для него определяют:
- относительный коэффициент затухания колебаний
 ;
; - время срабатывания и перерегулирование
 ,
,
где  - угол скоса потока при a=0 с убранной механизацией (
- угол скоса потока при a=0 с убранной механизацией (  рад для ГО, расположенного на фюзеляже, и
рад для ГО, расположенного на фюзеляже, и  для Т-образного ГО).
для Т-образного ГО).
Таблица. 5 Результаты расчетов динамических характеристик
H=500м
| M | Cy гп | V, м/с | nyα | Kz, 1/с | Mzα, 1/ 
| Mzωz, 1/с | MzaT, 1/с | ω0, 1/с | h0 | ξ0, с | tcp, с | ∆ny |
| 0,3 | 0,7689 | 101,5 | 5,16 | 1,97 | -0,16 | -0,17 | -0,073 | 0,492 | 0,37 | 0,7544 | 7,51 | 0,093528 |
| 0,4 | 0,4325 | 135,4 | 9,19 | 3,50 | -0,28 | -0,227 | -0,097 | 0,656 | 0,49 | 0,7545 | 5,64 | 0,093499 |
| 0,5 | 0,2768 | 169,2 | 14,4 | 5,48 | -0,44 | -0,284 | -0,122 | 0,82 | 0,62 | 0,7546 | 4,51 | 0,093479 |
| 0,6 | 0,1922 | 20,8 | 7,9 | -0,63 | -0,34 | -0,142 | 0,99 | 0,74 | 0,7534 | 3,73 | 0,093842 | |
| 0,7 | 0,1412 | 26,28 | 10,75 | -0,8 | -0,40 | -0,162 | 1,11 | 0,83 | 0,7431 | 3,24 | 0,096922 | |
| 0,8 | 0,1081 | 270,7 | 32,55 | 14,04 | -0,99 | -0,464 | -0,155 | 1,239 | 0,9 | 0,7256 | 2,79 | 0,102398 |
H=4000м
| M | Cy гп | V, м/с | nyα | Kz, 1/с | Mzα, 1/
| Mzωz, 1/с | MzaT, 1/с | ω0, 1/с | h0 | ξ0, с | tcp, c | ∆ny |
| 0,3 | 1,1906 | 97,4 | 3,33 | 1,28 | -0,10 | -0,12 | -0,049 | 0,37 | 0,25 | 0,6679 | 8,27 | 0,1227 |
| 0,4 | 0,6697 | 5,93 | 2,27 | -0,18 | -0,15 | -0,065 | 0,5 | 0,33 | 0,668 | 6,20 | 0,1227 | |
| 0,5 | 0,4286 | 9,27 | 3,54 | -0,28 | -0,191 | -0,081 | 0,62 | 0,42 | 0,6681 | 4,96 | 0,1226 | |
| 0,6 | 0,2976 | 13,40 | 5,1 | -0,41 | -0,23 | -0,095 | 0,75 | 0,50 | 0,6671 | 4,12 | 0,1230 | |
| 0,7 | 0,2187 | 16,97 | 6,94 | -0,52 | -0,27 | -0,109 | 0,84 | 0,56 | 0,6581 | 3,6 | 0,1265 | |
| 0,8 | 0,1674 | 21,02 | 9,07 | -0,64 | -0,31 | -0,104 | 0,94 | 0,61 | 0,643 | 3,14 | 0,1327 |
H=7000м
| M | Cy гп | V, м/с | nyα | Kz, 1/с | Mzα, 1/ 
| Mzωz, 1/с | MzaT, 1/с | ω0, 1/с | h0 | ξ0, с | tcp, c | ∆ny |
| 0,4 | 1,004 | 124,9 | 3,96 | 1,51 | -0,12 | -0,105 | -0,045 | 0,39 | 0,23 | 0,5901 | 6,97 | 0,1567 |
| 0,5 | 0,643 | 156,2 | 6,18 | 2,36 | -0,19 | -0,132 | -0,056 | 0,49 | 0,29 | 0,5902 | 5,57 | 0,1567 |
| 0,6 | 0,446 | 187,4 | 8,94 | 3,40 | -0,272 | -0,16 | -0,066 | 0,59 | 0,35 | 0,5895 | 4,63 | 0,1570 |
| 0,7 | 0,328 | 218,6 | 11,32 | 4,63 | -0,34 | -0,187 | -0,075 | 0,66 | 0,39 | 0,5816 | 4,06 | 0,1609 |
| 0,8 | -0,075 | 0,66 | 0,39 | 0,5816 | 4,06 | 0,1609 | ||||||
| 0,8 | 0,251 | 14,02 | 6,05 | -0,43 | -0,216 | -0,072 | 0,74 | 0,42 | 0,5684 | 3,58 | 0,1677 |

Рис. 5 Опорная частота не демпфируемых колебаний.
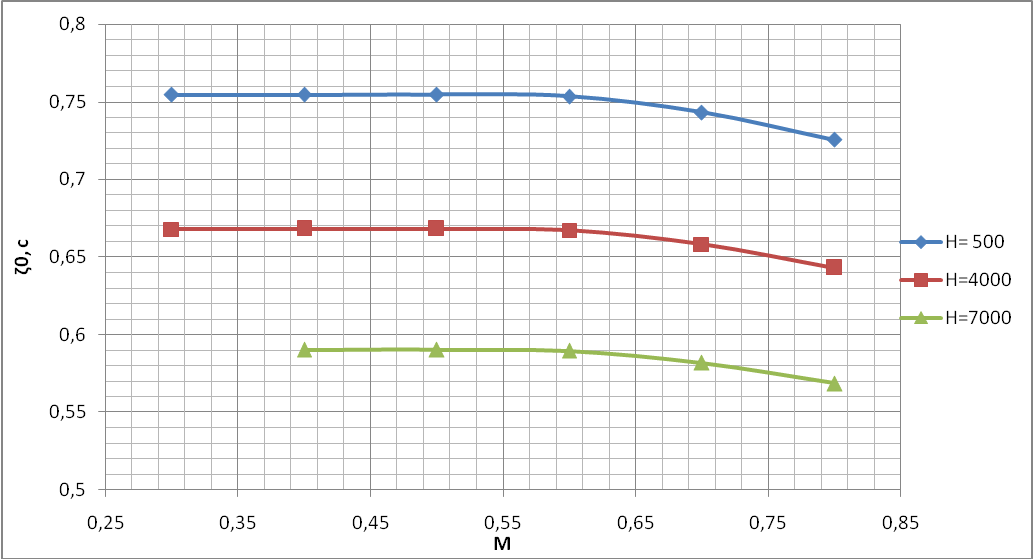
Рис. 6 Относительный коэффициент затухания колебаний.

Рис. 7 Время срабатывания.

Рис. 8 Области хорошей устойчивости и управляемости без АПУ.
Вывод:
Средствами аэродинамической компоновки самолета для заданного коэффициента запаса устойчивости  =-0,02, требуемые динамические характеристики не обеспечиваются, расчетные точки находятся за пределами области хорошей устойчивости и управляемости. Поэтому для перемещения точек в заданную область необходимо оборудовать самолет автоматом продольного управления (АПУ).
=-0,02, требуемые динамические характеристики не обеспечиваются, расчетные точки находятся за пределами области хорошей устойчивости и управляемости. Поэтому для перемещения точек в заданную область необходимо оборудовать самолет автоматом продольного управления (АПУ).