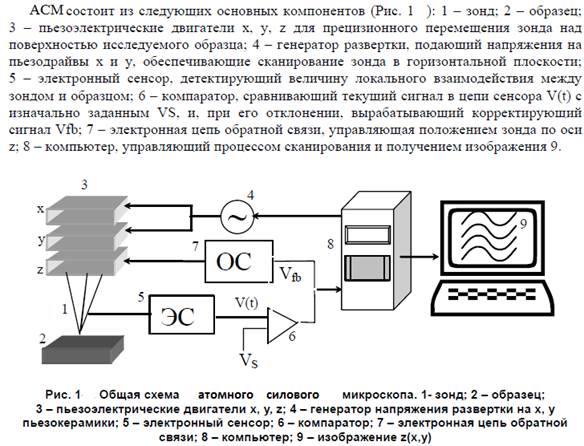
Общая конструкция АСМ
Основными конструктивными составляющими атомно-силового микроскопа являются:
· Жёсткий корпус, удерживающий систему

· Держатель образца, на котором образец закрепляется
Зондирование поверхности в АСМ производится с помощью специальных зондовых датчиков, представляющих собой упругую микробалку, называемую консолью или кантилевером (от англ.cantilever – консоль), один конец которой жёстко закреплен на кремниевом основании (держателе), а на другом конце располагается собственно зонд (рис.3).

Датчики изготовляются методами фотолитографии и травления из кремниевых пластин. Упругие консоли изготавливаются, в основном, из тонких слоев легированного кремния, SiO2 или Si3N4 (нитрид кремния).
В АСМ применяются, в основном, датчики двух типов - с кантилевером в виде балки прямоугольного сечения (I-образной формы) и с треугольным кантилевером, образованным двумя балками (V-образной формы) (рис.4а и рис.4б).

Рис.4. Зондовые датчики.
Иногда зондовые датчики АСМ имеют несколько кантилеверов различной длины на одном основании. В этом случае выбор рабочей консоли осуществляется юстировкой системы регистрации отклонения зонда.
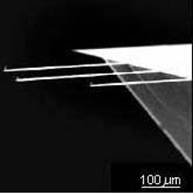
Кантилевер имеет следующие размеры: толщина около 50 мкм, ширина порядка 200 мкм и длинна 1…3 мм (пример реальной структуры).
Кантилеверы разделяются по длине балки на жесткие и мягкие, что характеризуется резонансной частотой колебаний кантилевера. Чем он длиннее и тоньше, тем он легче гнется. Перемещаясь в плоскости образца над поверхностью, кантилевер изгибается, отслеживая ее рельеф. Если бы он не мог хорошо гнуться, то при подводе его к исследуемой поверхности с помощью пьезодвигателя, зонд просто бы повредил поверхность, воткнувшись в нее. Поэтому его подбирают настолько мягким, чтобы при подводе к поверхности происходил его изгиб, а поверхность оставалась невредимой.
Зонд выполнен в виде острой алмазной (монокристалл Al2O3) иглы. Радиус закругления современных АСМ зондов составляет 1÷50 нм в зависимости от типа зондов и технологии их изготовления. Угол при вершине зонда - 10÷200.
· Устройства манипуляции (пьезоэлектрические двигатели - сканеры) предназначены для прецизионного перемещения зонда над поверхностью исследуемого образца с шагом в 0,01 нм или 0,1 А и для контроля расстояния зонд-образец.
В зависимости от конструкции микроскопа возможно сканирование поверхности двумя способами: движение зонда осуществляется относительно неподвижного образца или движение образца, относительно закреплённого зонда, посредством пьезодвигателя.
Работа большинства пьезоэлектрических двигателей основана на использовании обратного пьезоэлектрического эффекта, который заключается в изменении размеров пьезоматериала под действием электрического поля. В качестве прецизионных манипуляторов (или сканеров) используются элементы из пьезокерамики. Они способны осуществлять перемещения на расстояния порядка ангстрем, однако им присущи такие недостатки, как термодрейф, нелинейность, гистерезис, ползучесть (крип).
Наиболее распространенными типами сканеров являются треногий и трубчатый (рис.2).

В треногом сканере перемещения по трем координатам обеспечивают расположенные в ортогональную структуру три независимые пьезокерамики. Обычно электроды в виде тонких слоев металла наносятся на внешнюю и внутреннюю поверхность пьезоэлемента, а его торцы остаются непокрытыми. Под действием разности потенциалов между внутренним и внешним электродами пьезоэлемент изменяет свои продольные размеры.
Недостатками такого сканера являются сложность изготовления и сильная асимметрия конструкции. Поэтому наиболее широко используются сканеры на основе одного трубчатого элемента.
Внутренний электрод обычно сплошной. Внешний электрод сканера разделен по образующим цилиндра на 4 секции. При подаче противофазных напряжений на противоположные секции внешнего электрода (относительно внутреннего) происходит сокращение участка трубки в том месте, где направление поля совпадает с направлением поляризации, и удлинение там, где они направлены в противоположные стороны. Это приводит к изгибу трубки в соответствующем направлении. Таким образом осуществляется сканирование в плоскости X,Y. Изменение потенциала внутреннего электрода относительно всех внешних секций приводит к удлинению или сокращению трубки по оси Z.
· Система регистрации отклонения зонда (электронный сенсор) используется для регистрации величины силового взаимодействия между зондом и образцом.
Существует несколько возможных систем:
- Оптическая (включает лазер и фотодиод, наиболее распространённая)
- Интерферометрическая (состоит из лазера и оптоволокна)
- Ёмкостная (измеряется изменение ёмкости между кантилевером и расположенной выше неподвижной пластиной)
- Туннельная (исторически первая, регистрирует изменение туннельного тока между проводящим кантилевером и расположенной выше туннельной иглой)

Получение АСМ изображений рельефа поверхности связано с регистрацией малых изгибов упругой консоли зондового датчика. В атомно-силовой микроскопии для этой цели широко используются оптические методы (рис.5).

Для детектирования отклонения используется полупроводниковый лазер с длинной волны 670 нм и оптической мощностью 0,9 мВт. Происходит это следующим образом. Оптическая система АСМ юстируется таким образом, чтобы лазерный луч направлялся на обратную к по отношению к поверхности сторону кантилевера (тыльная сторона) (на самый кончик), которая покрыта специальным алюминиевым зеркальным слоем для наилучшего отражения, а отраженный луч попадал в центр специального четырёхсекционного фотодиода (фотоприемника). Таким образом, отклонения (изгиб) кантилевера приводят к смещению луча лазера относительно центра фотодиода. По относительному изменению освещенности верхней и нижней половинок фотодетектора судят о рельефе исследуемого образца
· Система обратной связи (ОС) предназначена для сохранения одного из режимов получения изображения во время процесса сканирования, а также для управления положением зонда по оси z.
Изображение рельефа в атомно-силовом микроскопе обычно получают в одном из двух режимов:
ü режим постоянной высоты (при постоянном среднем расстоянии между основанием зондового датчика и поверхностью образца)
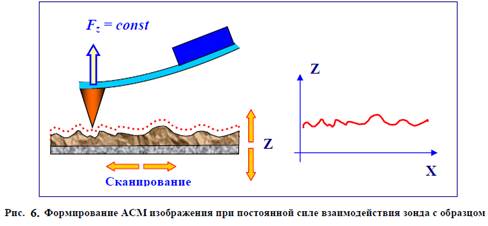
ü режим постоянной силы взаимодействия
При сканировании образца в режиме Fz = const система ОС поддерживает постоянной величину изгиба кантилевера, а следовательно, и силу взаимодействия зонда с образцом (рис.6). При этом управляющее напряжение в петле обратной связи, подаваемое на Z-электрод сканера, будет пропорционально рельефу поверхности образца.
Для схемы (рис.1) этот режим реализуется следующим образом. При приближении зонда к поверхности образца сигнал сенсора возрастает. Реальное мгновенное значение напряжения V(t), пропорциональное разностному току фотодиода, сравнивается в компараторе с опорным напряжением Vs, задаваемым оператором. Компаратор вырабатывает корректирующий сигнал Vfb = V(t) - Vs, используемый в качестве управляющего для Z-электрода сканера. Сканер отрабатывает данный сигнал до тех пор, пока разность (V(t) - Vs) не станет равной нулю, при этом удаляя зонд от поверхности образца. Сигнал с выхода компаратора записывается с помощью АЦП как информация о рельефе поверхности в память компьютера, а затем воспроизводится средствами компьютерной графики.
При исследовании образцов с малыми (порядка единиц ангстрем) перепадами высот рельефа часто применяется режим сканирования при постоянном среднем расстоянии между основанием зондового датчика и поверхностью (Z = const). В этом случае зондовый датчик движется на некоторой средней высоте Zср над образцом (рис.7), при этом в каждой точке регистрируется изгиб консоли ΔZ, пропорциональный силе, действующей на зонд со стороны поверхности. АСМ изображение в этом случае характеризует пространственное распределение силы взаимодействия зонда с поверхностью.

Образец (поверхность) и кантилевер сближаются с помощью шагового двигателя до тех пор, пока поверхность и кантилевер не начнут взаимодействовать, что приведёт к такому смещению лазерного луча на секциях фотодиода, а значит к такому разностному току, что обратная связь прекратит сближение.

· Управляющий блок с электроникой (компьютер), управляющий процессом сканирования и получением изображения.
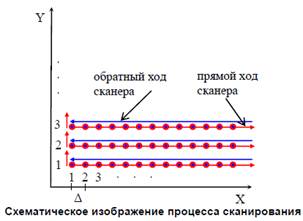
Процесс сканирования в АСМ осуществляется следующим образом. Зонд движется вдоль линии (строки) сначала в прямом, а потом в обратном направлении (строчная развертка), затем переходит на следующую строку (кадровая развертка). Движение зонда осуществляется с помощью сканера небольшими шагами под действием пилообразных напряжений, подаваемых с генератора развертки (обычно, с цифро-аналогового преобразователя). Регистрация информации о рельефе поверхности производится, как правило, при прямом проходе.
Информация, полученная с помощью АСМ, хранится в виде кадра – двумерного массива целых чисел Zij (матрицы). Каждому значению пары индексов ij соответствует определенная точка поверхности в пределах поля сканирования. Как правило, матрицы имеют размер 200х200 или 300х300 элементов. Визуализация полученных кадров производится средствами компьютерной графики в виде двумерных яркостных (2D) и трехмерных (3D) изображений.