Вычисление параметров эллипсоида ошибок
Если координаты пункта, определенного пространственной геодезической засечкой, найдены путем минимизации целевой функции (3.3), то эллипсоид погрешностей может быть получен в соответствии с теоремой Х.Вольфа [138] по изоповерхности критериальной функции
 . (4.6)
. (4.6)
Зная, что для многократной пространственной засечки в соответствии с (3.6) для точки минимума
 , (4.7)
, (4.7)
найдем приращение целевой функции из точки минимума до изоповерхности, соответствующей эллипсоиду ошибок, определяя разность (4.6) - (4.7)
 . (4.8)
. (4.8)
Формула (4.8) лучше равенства (4.6), поскольку позволяет выполнять не только апостериорную, но и априорную оценку точности для любых пространственных засечек, включая однократные, при решении которых  .
.
Таким образом, задавая приращение целевой функции из точки минимума, равное m2, определим средний квадратический эллипсоид ошибок методами нелинейного программирования по полученной изоповерхности.
Прежде чем приступить к изложению методики определения элементов эллипсоида погрешностей по изоповерхности (4.6), сначала получим вспомогательные формулы, необходимые для вычислений в системе координат X, Y, Z.
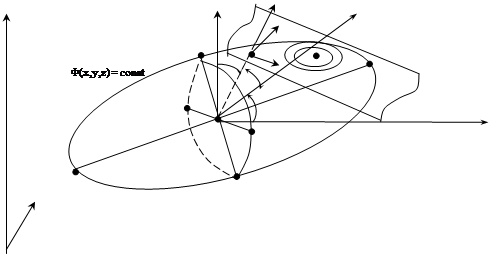
Предположим, что минимизация целевой функции (3.3) завершена в точке О (рис.4.3), являющейся центром эллипсоида погрешностей. Из множества изоповерхностей Ф(x, y, z) = const выберем изоповерхность (4.6), близкую к эллипсоиду погрешностей.
 Z Zo Z²
хо
Q х²
C P y² M
A
g w
E
b
O K yo
B
D
X Z Zo Z²
хо
Q х²
C P y² M
A
g w
E
b
O K yo
B
D
X
|

Рис. 4.3. Эллипсоид погрешностей и оси координат
Перейдем к новой системе x°, y°, z° с началом в точке О и возьмем некоторую произвольную точку P(x°p, y°p, z°p). Направление ОР характеризуется в пространстве косинусами углов w, b, g, которые найдем по координатам точки P по формулам
 (4.9)
(4.9)
Плоскость Q, проходящая через точку Р перпендикулярно к направлению ОР, пересечет множество изоповерхностей целевой функции. Их след на плоскости Q показан на рис. 4.3 вокруг точки M ¾ минимума целевой функции в плоскости Q. Если плоскость Q будет перпендикулярна к OA, то направление OM совпадет с направлением большой полуоси эллипсоида ошибок. Используя это свойство, можно построить в полученной на рис. 4.3 точке М новую плоскость, перпендикулярную не к ОР, а к ОМ, и, выполнив минимизацию целевой функции в этой новой плоскости, найти направление, ближайшее к направлению ОА.
Минимизацию целевой функции в секущей плоскости Q удобнее всего осуществлять в системе x², y², z², изменяя лишь переменные x², y². Эта система координат должна быть такой, чтобы возможен был переход к системе x°, y°, z°, и следовательно к системе x, y, z в которой вычисляются значения целевой функции.
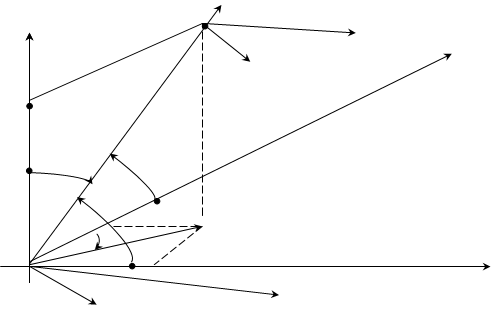
Для вывода соответствующих формул перехода обратимся к рис. 4.4, где изображена система x°, y°, z°, показана точка
 Z¢(Z²)
P
Zo ²x
xo
y²
H°P
g
w
b
P¢
a
YO
O
x¢
y¢1 Z¢(Z²)
P
Zo ²x
xo
y²
H°P
g
w
b
P¢
a
YO
O
x¢
y¢1
|
Рис. 4.4. Системы координат
P и обозначены углы w, b, g образованные направлением ОР с положительными направлениями осей координат.
Дирекционный угол стороны ОР¢ обозначен a, где Р¢ ¾ проекция точки Р на плоскость х°оу°. Перейдем к системе x°, y°, z° от вспомогательной системы x¢, y¢, z¢ с началом в точке О, ориентированной следующим образом: ось OZ¢ составляет с осью OZ° угол g; ось ОX¢, или направление ОР' образует с осью ox° угол a. Переход от системы x¢, y¢, z¢ к x°, y°, z° осуществляется путем преобразований:
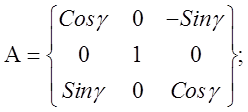
1) поворота системы x¢, y¢, z¢ вокруг оси oy¢ против хода часовой стрелки на угол g с помощью матрицы
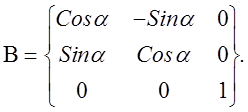
2) поворота полученной системы x*, y*, z° вокруг оси oz° 2 против хода часовой стрелки на угол a с помощью матрицы
Общий поворот систем координат выражается матричным произведением
Следовательно,
Выполняя параллельный перенос системы x¢, y¢, z¢ по оси Z¢ с началом в точке Р, получим систему x², y², z², а также на основании предыдущих формул ¾ выражение для перехода от x², y², z² к системе x, y, z
Поскольку в дальнейшем предполагается минимизация целевой функции только в плоскости x²Py² (т.е. в плоскости Q на рис 4.3), то полагая z² = 0, окончательно получим
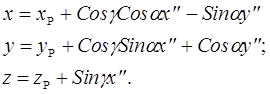 (4.10)
(4.10)
Чтобы в процессе минимизации целевой функции в секущей плоскости каждый раз не вычислять коэффициенты при переменных x², y² их необходимо получать заранее по формулам
 (4.11)
(4.11)
где Cosw, Cosb, Cosg ¾ направляющие косинусы отрезка ОР, найденные по (4.9).
Таким образом, зная координаты некоторой точки N(x², y²) на секущей плоскости, используя (4.10), получим координаты N (x, y, z), и вычислим в этой точке значение целевой функции, минимизацию которой в секущей плоскости Q в системе x², y² можно выполнить любыми известными методами нелинейного программирования.
Последовательность вычислений при определении элементов эллипсоида погрешностей методом прямого поиска состоит в следующем.
  Zo Zo
   16 16
  6 7 6 7
   8 8
  10 10
   2 2
       Yo
5 4 Yo
5 4
   11 12 11 12
 14 13 14 13
  15 15

|
| Х0 |
1. Найдем с точностью p/4 направление большой полуоси a. Для этого на полусфере единичного радиуса вычислим значения целевой функции в 17 симметрично расположенных точках (см.рис.4.5), и выделим из них ту, в которой приращение критериальной функции будет минимальным. Допустим, это будет точка Р на рис. 4.3.
Рис. 4.5. Вспомогательная полусфера и точки на ней
2 Найдем точное направление большой полуоси. Для этого вычислим направляющие косинусы отрезка ОР по формулам (4.9), и найдем минимум целевой функции в секущей плоскости Q, перпендикулярной ОР. Для этого, изменяя координаты x², y² и используя (4.10), осуществим минимизацию целевой функции любым двухмерным алгоритмом нелинейного программирования, например, методом релаксаций. В результате получим координаты точки М (см. рис.4,3). По направлению ОМ повторим вычисления, как и для направления ОР используя новую плоскость Q с минимумом целевой функции в точке М¢. Цель таких приближений ¾ найти точку Mj, лежащую по направлению ОA с тем, чтобы получить направляющие косинусы большой полуоси с необходимой точностью.
3 Зная направляющие косинусы для ОA, можно вычислить координаты любой точки на этом отрезке по формулам
и для поиска значения большой полуоси a, изменяя Sj, выполнить одномерную минимизацию целевой функции
 , (4.12)
, (4.12)
где DF ¾ приращения целевой функции из точки минимума до изоповерхности эллипсоида ошибок.
4. Выполняя поиск параметров эллипса в плоскости, проходящей через точку О перпендикулярно к ОА (см.рис.4.3) по методике, изложенной в подразделе 4.1, найдем полуоси b и c и их направляющие косинусы. Здесь также используются формулы (4.10), заменяя в них координаты точки Р на координаты точки O и вычисляя w, b, g, и a по формулам (4.9) и (4Л1) для отрезка ОА.
Как видим, методика поиска элементов эллипсоида погрешностей осталась той же, что и для двухмерного случая. Добавились лишь новые формулы (4.10).
Решим пример и найдём по предложенной методике элементы эллипсоида погрешностей для пространственной засечки по четырем вертикальным углам с исходными данными в табл. 2.16.
Путем минимизации целевой функции (3.3) методом нелинейного программирования получены уравненные координаты определяемого пункта:
 = 70,036 м;
= 70,036 м;  = 109,931 м;
= 109,931 м;  = 1,998 м
= 1,998 м
При sn = 5² определены m = 6,5² и элементы эллипсоида ошибок:
a = 0,018 м; Cosax = - 0,428; Cosay = 0,904; Cosaz = 0,015;
b = 0,012 м; Cosbx = - 0,903; Cosby = - 0,428; Cosbz = 0,042;
c = 0,00034 м; Coscx = 0,031; Coscy = 0,031; Coscz = 0,999;
Методом линейной алгебры получены:
a = 0,020 м; Cosax = - 0,468; Cosay = 0,883; Cosaz = 0,018;
b = 0,011 м; Cosbx = - 0,882; Cosby = 0,469; Cosbz = - 0,041;
c = 0,00035 м; Coscx = 0,045; Coscy = 0,004; Coscz = 0,999.
Отметим следующие недостатки новой методики по сравнению с получением элементов эллипсоида ошибок методами линейной алгебры.
1. Программа для ЭВМ занимает в 2,5 раза больше операторов и трудно отлаживается.
2. Программа примерно в 30 раз дольше считает и занимает на оценку точности одного пункта 2 с. времени на IВМ РС/АТ-386.
Преимущества новой методики заключаются в следующем.
1. Стратегия поиска одинакова для эллипса и эллипсоида погрешностей, не зависящая от вида целевой функции. Например, если та же засечка уравнивалась по методу наименьших модулей путем минимизации целевой функции (3.1) при n = 1, то эллипсоид ошибок при выборе DF, входящего в (4.12) под условием постоянства большой полуоси a при использовании функции (3.3), будет таким
= 70,036 м; = 109,931 м; = 1,998 м, m = 6,67²;
a = 0,018 м; Cosax = - 0,052; Cosay = 0,999; Cosaz = 0;
b = 0,013 м; Cosbx = 0,997; Cosby = 0,052; Cosbz = - 0,061;
c = 0,00034 м; Coscx = 0,061; Coscy = 0,003; Coscz = 0,998.
2. Методика устойчива при любом качестве засечек и не даст деления на ноль даже в вырожденном случае.