С. АД при холостом ходе.
Режимы работы асинхронных двигателей. Холостой ход. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя при холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
При холостом ходе в асинхронном двигателе имеют место те же электромагнитные процессы, что и в трансформаторе (обмотка статора аналогична первичной обмотке трансформатора, а обмотка ротора—вторичной обмотке). По обмотке статора проходит ток холостого хода I0, однако его значение в асинхронном двигателе из-за наличия воздушного зазора между ротором и статором значительно больше, чем в трансформаторе (20—40 % номинального тока по сравнению с 3—10 % у трансформатора). Для уменьшения тока I0 в асинхронных двигателях стремятся выполнить минимально возможные по соображениям конструкции и технологии зазоры. Например, у двигателя мощностью 5 кВт зазор между статором и ротором обычно равен 0,2—0,3 мм. Ток холостого хода, так же как и в трансформаторе, имеет реактивную и активную составляющие. Реактивная составляющая тока холостого хода (намагничивающий ток) обеспечивает создание в двигателе требуемого магнитного потока, а активная составляющая — передачу в обмотку статора из сети энергии, необходимой для компенсации потерь мощности в машине в этом режиме.
При холостом ходе асинхронного двигателя МДС ротора близка к нулю и вращающийся магнитный поток создается только МДС статора
 ,где
,где  – ток холостого хода двигателя.
– ток холостого хода двигателя.
При увеличении нагрузки на валу двигателя увеличивается ток ротора, а его МДС  . Геометрическая сумма МДС статора и ротора всегда равна МДС статора при холостом ходе
. Геометрическая сумма МДС статора и ротора всегда равна МДС статора при холостом ходе  .
.
Отсюда  или
или 
где  – приведенный ток ротора. (11.21)
– приведенный ток ротора. (11.21)
Здесь  – коэффициент трансформации по току.
– коэффициент трансформации по току.
D. Принцип создания вращающегося магнитного поля
(с помощью системы неподвижных катушек с токами).
 Рассматриваем линейную среду (воздух:
Рассматриваем линейную среду (воздух:  ), допустима суперпозиция.
), допустима суперпозиция.


Вывод: сумма двух пульсирующих полей, направленных вдоль осей, смещенных в пространстве друг относительно друга, при условии, что эти поля пульсируют во времени со сдвигом по фазе, является вращающимся полем, в общем случае- эллиптическим.
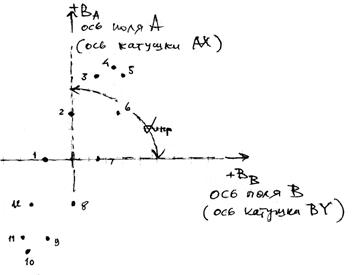
вращающееся поле, созданное двухфазной системой
При  получается круговое вращающееся поле.
получается круговое вращающееся поле.
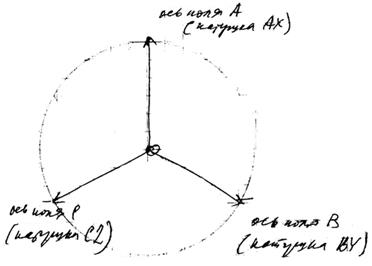
В случае трехфазной системы круговое вращающееся поле создается при условии, что катушки смещены в пространстве на  , а их токи- во времени на .
, а их токи- во времени на .
Обратим внимание на то, что в стержнях трехфазного трансформатора существуют пульсирующие потоки, смещенные по временной фазе на треть периода. Это значит, что расположив эти стержни определенным образом и вырезав часть стали чтобы создать пространство, которое в дальнейшем мы назовем активной зоной, можно получить вращающееся магнитное поле.
Для того, чтобы осуществить вращение внутренней части этого модифицированного трансформатора, надо, во-первых, обеспечить электрические контуры, в которых должны индуктироваться токи, и, во-вторых, избавиться от паразитных моментов, которые особенно сильны в том случае, когда число выступов (полюсов, зубцов) на внутренних и внешних сердечниках одинаково (пунктирные линии). С этой целью мы размещаем на внутренней части (роторе) обмотку и сердечник делаем цилиндрическим. Это- основные конструктивные изменения, вносимые в трансформатор.
Е. Приведение асинхронной машины с вращающимся ротором к асинхронной машине с неподвижным ротором.
Действующее значение ЭДС фазы первичной обмотки:  (2.1)
(2.1)
где  число эффективных витков фазы
число эффективных витков фазы
 обмоточный коэффициент первичной обмотки
обмоточный коэффициент первичной обмотки
 коэффициент распределения
коэффициент распределения
 коэффициент укорочения
коэффициент укорочения
 амплитуда потока взаимоиндукции
амплитуда потока взаимоиндукции
ЭДС фазы вторичной обмотки:  (2.2)
(2.2)
где  частота токов в роторе
частота токов в роторе
 скольжение (2.3)
скольжение (2.3)
Обозначим ЭДС ротора при заторможенном роторе  :
:  (2.4)
(2.4)
Очевидно, что  (2.5)
(2.5)
Обмотка ротора обладает собственными параметрами:
 индуктивное сопротивление рассеяния (при вращающемся роторе)
индуктивное сопротивление рассеяния (при вращающемся роторе)
 активное сопротивление
активное сопротивление
Причем  (2.6)
(2.6)
где  индуктивное сопротивление вторичной обмотки при заторможенном роторе.
индуктивное сопротивление вторичной обмотки при заторможенном роторе.
Полное сопротивление (короткозамкнутой) вторичной обмотки:  (2.7)
(2.7)
Если к обмотке ротора подключено дополнительное сопротивление, оно должно войти в  .
.
Ток ротора (при любом скольжении):  (2.8)
(2.8)
Таким образом, действующее значение тока ротора не изменится, если ротор, вращающийся со скольжением  заменить неподвижным с активным сопротивлением, уменьшенным в раз. Частота токов ротора при этом станет равной частоте сети.
заменить неподвижным с активным сопротивлением, уменьшенным в раз. Частота токов ротора при этом станет равной частоте сети.
F. Приведение обмотки ротора к обмотке статора
В отличие от трансформатора, в АМ первичная и вторичная обмотки могут иметь разное число фаз (в КЗ-АМ, например,  ) и разное конструктивное исполнение. Однако, так же как и для трансформатора, вторичную обмотку можно привести к первичной. При этом полагают:
) и разное конструктивное исполнение. Однако, так же как и для трансформатора, вторичную обмотку можно привести к первичной. При этом полагают:

В итоге получают: 
И так же как для трансформатора вводят коэффициенты приведения:
- по напряжениям:  - по току:
- по току: 
Через конструктивные данные машины коэффициенты приведения могут быть выражены следующим образом: 

Здесь  и
и  - обмоточные коэффициенты, учитывающие отличие обмотки, выполненной по реальной схеме (распределенной и, возможно, с укорочением шага) от так называемой сосредоточенной обмотки, состоящей из единственной катушки.
- обмоточные коэффициенты, учитывающие отличие обмотки, выполненной по реальной схеме (распределенной и, возможно, с укорочением шага) от так называемой сосредоточенной обмотки, состоящей из единственной катушки.  коэффициент скоса (пазов)
коэффициент скоса (пазов)
Заметим, что так же как и в трансформаторе, МДС приведенной обмотки сохраняется.
G. Уравнения, схема замещения и параметры асинхронной машины.
Уравнения АМ, в сущности, не отличаются от уравнений трансформатора. Отличие в том, что ко вторичной обмотке обычно не подключается полезная нагрузка  . Кроме того, индуктивное сопротивление взаимоиндукции обычно называют главным индуктивным сопротивлением.
. Кроме того, индуктивное сопротивление взаимоиндукции обычно называют главным индуктивным сопротивлением.
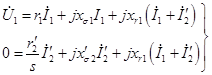
Этим уравнениям соответствует схема замещения:

Т-образная схема замещения
Здесь  может включать в себя дополнительное сопротивление, подключенное ко вторичной обмотке.
может включать в себя дополнительное сопротивление, подключенное ко вторичной обмотке.
H. Параметры асинхронной машины (схемы замещения)