РАБОТА 6
МОДЕЛИРОВАНИЕ САР С НЕЛИНЕЙНЫМИ СТАТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ В ВИДЕ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Существуют САР с элементами, статические характеристики которых описываются нелинейными аналитическими функциональными зависимостями. Такие нелинейные элементы (см. ниже) линеаризуются на основе ряда Тейлора, в результате чего получается приближенная математическая модель системы в виде структурной схемы линеаризованной САР. Примером подобной системы может служить нелинейная САР температуры в инкубационной камере.
В ПК «МВТУ» имеются типовые блоки Функции математические и Новый, с использованием которых можно моделировать практически любую нелинейную функциональную зависимость. Наличие этих блоков позволяет на основе ПК «МВТУ» моделировать нелинейные САР непосредственно по исходным нелинейным моделям без предварительной линеаризации нелинейных функциональных зависимостей, что существенно повышает достоверность результатов их исследований.
Цели работы:
• закрепить понятия и вопросы, относящиеся к нелинейным САР (понятия нелинейных элементов и систем, линеаризация нелинейных статических характеристик, понятие линеаризованной системы);
• освоить методику моделирования нелинейных САР на основе ПК «МВТУ» с использованием блоков Функции математтеские и Новый.
Теоретический материал, необходимый для выполнения лабораторной работы.Необходимо владеть понятиями, относящимися к нелинейным системам, а также знать функциональные возможности ПК «МВТУ» и основные этапы работы в его среде. Помимо этого следует изучить порядок и процедуры работы с блоком Новый.
Порядок выполнения работы:
• освоить приемы работы с блоком Новый на базе демонстрационного примера;
• по заданному варианту самостоятельно подготовить исходные данные конкретной САР и выполнить ее компьютерное моделирование.
Математическое моделирование технических систем, в том числе САУ и САР, базируется на математических моделях. Под термином математическая модельпонимается записанная в форме математических соотношений совокупность знаний, представлений и гипотез о технической системе.
Первичной (исходной) формой представления математической модели (математическим описанием) любой САР является система дифференциальных и алгебраических уравнений, отображающих динамические свойства объекта регулирования и элементов системы (регулятора). Эти уравнения могут быть определены аналитически на основе законов физики, положенных в основу работы объекта регулирования и элементов системы, или экспериментально с использованием методов активного или пассивного эксперимента.
Аналитический метод определения математических моделей автоматических систем рассмотрим на примере простейшей САР температуры в камере для инкубации яиц (рис. 1.1).
Объектом регулирования в данной САР является инкубационная камера с лотком и яйцами, уложенными на нем. Регулируемая величина — температура в камере U0к зависит от возмущающего воздействия — температуры окружающей среды Θ0. Величину ΘК можно регулировать, изменяя регулирующее воздействие — температуру нагревательного элемента ΘН.
Данная САР работает следующим образом. Для измерения температуры в инкубационной камере 7 имеется термопара 2, сигнал которой — ЭДС Е сравнивается с задающим (опорным) сигналом U0. Изменяя опорное напряжение U0 с помощью резистора 9, подключенного к стабилизированному источнику постоянного тока, задают необходимую температуру в камере инкубатора (Θзад = 37,5 ± 0,2 °С). При этом входные и выходные величины элементов САР (ΔU=U0 - Е; Uy; UH; Θ Н) будут иметь определенные значения, соответствующие заданному значению температуры в инкубаторе.

Рис. 1.1. Принципиальная (а) и функциональная (б) схемы САР температуры в камере инкубатора:
1 — инкубационная камера; 2 — термопара; 3 — лоток с яйцами; 4 — нагревательный элемент; 5 — исполнительный орган — тиристорный регулятор напряжения; 6— силовой блок; 7 — блок управления тиристорами; 8 — электронный усилитель постоянного тока; 9 — задающий резистор; ОР — объект регулирования; РО — регулирующий орган; ИО — исполнительный орган; УО — усилительный орган; СО — сравнивающий орган; ВО — воспринимающий орган
Если, например, внешнее возмущение — температура окружающей среды Θ 0 уменьшилась, то снизится и температура Θ К внутри камеры инкубатора. Это, в свою очередь, приведет к уменьшению сигнала термопары Ен к росту сигнала рассогласования ΔU=U0 - Е, что вызовет увеличение напряжения UH на нагревательном элементе, выделяемой им мощности Р и его температуры Θ Н. Увеличение последней приведет к росту температуры Θ К до заданного значения. Увеличение температуры окружающей среды 0о по аналогии с вышеизложенным вызовет обратный эффект (увеличение Θ К, Е и уменьшение Uy, UH, Θ H).
Рассматриваемая простейшая САР может функционировать только при выполнении условия Θ 0 < Θ зад. Если возможны условия, когда Θ 0 > Θ 0 (в теплый период года), то САР необходимо дополнить еще одним регулирующим органом, обеспечивающим охлаждение инкубационной камеры.
Задача построения математической модели данной САР состоит в определении уравнений, отображающих взаимосвязи в объекте регулирования регулируемой величины ΘК с входными воздействиями ΘН и Θ 0, а в остальных элементах системы соответственно выходных величин с входными в динамическом режиме.
В динамическом режиме работы любой САР регулируемая величина, а также входные и выходные величины изменяются во времени t. Поэтому все рассмотренные ранее величины применительно к САР (см. рис. 1.1) будут переменными во времени и их следует записывать так: ΘК(t) , Θ0(t), ΘН(t), Е(t), ΔU(t), Uy(t),UH(t). Однако для упрощения записи допускается изображение переменных величин без указания времени t, что и будет использовано при дальнейшем изложении.
Математическую модель объекта регулирования(камеры инкубатора совместно с лотком и яйцами) определяют на основе уравнения теплового баланса:

где Ск — усредненная теплоемкость, определяемая теплоемкостями воздуха внутри камеры, яиц и материала лотка; тк — усредненная масса, определяемая массами воздуха, яиц и лотка; Фп.к — поток теплоты, поступающий в камеру от нагревательного элемента; Фо.к — поток теплоты, отводимый из камеры через стенки в окружающую среду.
Поток теплоты, поступающий в камеру от нагревателя,

где αн — коэффициент теплоотдачи нагревательного элемента; FH — площадь поверхности нагревательного элемента.
Поток теплоты, отводимый из камеры,

где α0 — коэффициент теплоотдачи ограждения (стенок) камеры; F0 — площадь теплоотдающей поверхности стенок камеры.
С учетом формул (1.2) и (1.3) уравнение (1.1) после несложных преобразований примет вид
Постоянную времени Тк камеры и коэффициенты передачи kн и kо определяют по формулам

Математическую модель регулирующего органа(нагревательного элемента) определяют по аналогии с изложенным ранее на основе уравнения теплового баланса

где Сн, тн — соответственно удельная теплоемкость и масса нагревательного элемента; Рн — мощность нагревательного элемента.
С учетом формулы (1.2) уравнение (1.5) после соответствующих преобразований примет вид

Вводя обозначения
уравнение (1.5) можно окончательно записать так:

где Тн, kн — соответственно постоянная времени и коэффициент передачи нагревательного элемента.
Мощность

где UH — напряжение на нагревательном элементе; R— активное сопротивление нагревательного элемента.
Таким образом, динамика нагревательного элемента описывается уравнениями (1.7) и (1.8).
Для получения математической модели(дифференциального уравнения) воспринимающего органа(термопары) запишем уравнение теплового баланса

где Ст, mт — соответственно удельная теплоемкость и масса термопары; ΘТ — температура термопары; Θп т — поток теплоты, поступающий к термопаре из воздушного пространства камеры.
Поток теплоты

где αТ — коэффициент теплоотдачи от воздуха к термопаре; FT — площадь поверхности термопары.
С учетом формулы (1.10) уравнение (1.9) примет вид

Вводим обозначение

где ТТ — постоянная времени термопары.
Тогда уравнение теплового баланса окончательно запишем так:

Это уравнение отображает только термический процесс в термопаре. По условию же задачи необходимо определить взаимосвязь температуры в камере ΘК с ЭДС термопары Е. Зависимость ЭДС термопары от ее температуры ΘТ можно приближенно описать так:

где kТ — коэффициент, определяемый по графику градуировочной (статической) характеристики термопары (рис. 1.2) как отношение приращений ΔΕ к ΔΘ в рабочей зоне: kТ = ΔΕ / ΔΘ.
Исключая в уравнениях (1.12) и (1.13) промежуточную переменную ΘТ и учитывая, что
получим окончательно дифференциальное уравнение термопары
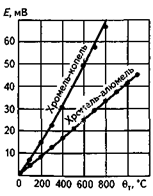
Рис. 1.2. Градуировочные характеристики термопар

Следует подчеркнуть, что при определении математических моделей инкубационной камеры, нагревательного элемента и термопары использован один физический принцип (закон) теплотехники — принцип теплового баланса. Это обусловлено тем, что работа (физическая суть) инкубационной камеры, нагревателя и термопары основана на тепловых процессах.
Остальные элементы рассматриваемой САР (см. рис. 1.1) — тиристорный регулятор напряжения (ИО) и электронный усилитель (УО) являются электротехническими устройствами. Их математические модели можно определить на основе законов электротехники. Эти элементы относятся к электронным устройствам, в которых входные сигналы передаются на выход практически без каких-либо временных задержек, так как ток в них создается за счет электронов и «дырок», обладающих сверхмалой массой. Поэтому математические модели тиристорного регулятора напряжения (усилителя) и электронного усилителя описываются соответственно следующими алгебраическими уравнениями:

где kтр, kэ — коэффициенты усиления соответственно тиристорного регулятора и электронного усилителя
Вывод уравнений (1.15), выполненный на основе законов Кирхгофа, можно найти в любом учебнике по электротехнике.
Таким образом, с учетом зависимости ΔU=U0 - Е, отображающей обратную связь в системе, на основе уравнений (1.4), (1.7), (1.8), (1.14) и (1.15) математическая модель САР температурыв инкубаторе может быть представлена следующей системой уравнений:
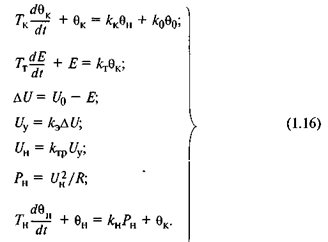
Анализ системы уравнений (1.16) показывает, что рассматриваемая САР нелинейная. Ее нелинейность обусловлена наличием нелинейного алгебраического уравнения (1.8). Это уравнение можно привести к линеаризованному виду, используя известные в теории автоматического регулирования методы линеаризации [2], основываясь на следующих рассуждениях.
Рассматриваемая система стабилизации температуры в инкубаторе (см. рис. 1.1) предназначена для поддержания температуры в камере ΘК на заданном уровне. При работе системы величина 8К изменяется в пределах малых отклонений ± ΔΘК относительно заданного значения. В пределах малых отклонений будут изменяться также все входные и выходные величины элементов САР, в том числе напряжение Uн на нагревательном элементе и его мощность Р соответственно относительно значений Uн0 и P0 (здесь Uн0, P0 — напряжение на нагревательном элементе и его мощность, соответствующие установившемуся заданному значению температуры в инкубаторе).
Для линеаризации уравнения (1.8) воспользуемся аналитическим методом линеаризации, разложив его в ряд Тейлора, при U = Uн0.
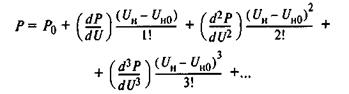
Пренебрегая нелинейными членами ряда ввиду их малости, получаем

Так как Р – P0 = ΔР, a UH - Uн0 = ΔUH, то линеаризованное уравнение в пределах малых отклонений мощности ΔР и напряжения ΔUH можно записать в следующем виде:

Для определения kp возьмем производную от исходной функции (1.8)
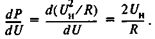
Подставив в это выражение UH = Uн0, получим

С учетом выражения (1.18) линеаризованное уравнение мощности нагревательного элемента (1.17) примет вид

Таким образом, нелинейную математическую модель САР (1.16) с учетом уравнения (1.17) можно рассматривать как линеаризованную математическую модель.
Известно [2...4], что линейные и линеаризованные математические модели САР в виде дифференциальных и алгебраических уравнений могут быть представлены соответствующими им передаточными функциями. Для рассматриваемой САР передаточные функции на основе уравнений (1.4), (1.7), (1.14), (1.15), (1.17) после их преобразования по Лапласу при нулевых начальных условиях примут вид:
 передаточная функция камеры инкубатора по регулирующему воздействию;
передаточная функция камеры инкубатора по регулирующему воздействию;
 - передаточная функция камеры по возмущающему воздействию;
- передаточная функция камеры по возмущающему воздействию;
 — передаточная функция термопары;
— передаточная функция термопары;
 — передаточная функция нагревателя по каналу мощности Р;
— передаточная функция нагревателя по каналу мощности Р;
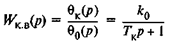
 — передаточная функция нагревателя по каналу температуры ΘК;
— передаточная функция нагревателя по каналу температуры ΘК;
 - передаточная-.функция, соответствующая линеаризованному уравнению (1.17);
- передаточная-.функция, соответствующая линеаризованному уравнению (1.17);
 - передаточная функция алектринного усилителя;
- передаточная функция алектринного усилителя;
 - передаточная функция шристорного регулятора напряжения,
- передаточная функция шристорного регулятора напряжения,
где Θк(р), ΘН(р), Θ0(р), Е(р), Р(р), ΔР(р), UH(p), ΔUH(p), Uy(p), ΔU(p) - изображения по Лапласу соответственно температуры в камере Θк, нагревателя ΘН, окружающей атмосферы Θ0, ЭДС Е термопары, мощности Р и ее отклонения ΔР, напряжения UH и его отклонения ΔUH, напряжения Uy и сигнала рассогласования ΔU при нулевых начальных условиях.
Интерпретация математических моделей автоматических систем совокупностью передаточных функций объекта регулирования и элементов регулятора позволяет представить математические модели САР графически в виде структурных схем [2...4], которые достаточно просто составить на основе заданных функциональных схем и передаточных функций. Применительно к рассматриваемому примеру структурная схема САР (см. рис. 1.1) в соответствии с ее функциональной схемой и приведенными выше передаточными функциями будет иметь вид, показанный на рисунке 1.3. На структурных схемах вместо изображений переменных (входных и выходных величин) допускается указывать их оригиналы, что существенно повышает их дидактичность и физическую наглядность.
Если математический аппарат передаточных функций применим только для линейных и линеаризованных САР, то графические представления динамических свойств автоматических систем с использованием структурных схем можно использовать также для любых нелинейных САР. На структурных схемах можно отображать нелинейные зависимости, заданные как аналитически, так и графически. При графическом представлении нелинейностей в соответствующих звеньях структурных схем указывают эти графики. Если нелинейность задана ввиду функциональных зависимостей, то в звеньях структурных схем указывают соответствующие формулы или адекватные им условные графические обозначения. На рисунке 1.4 в качестве примера показаны структурные схемы некоторых нелинейных звеньев и элементов.
На основе изложенного исходную нелинейную математическую модель САР температуры в камере инкубатора (1.16) можно представить в виде структурной схемы (рис. 1.5).
Обобщая изложенное, можно отметить следующее: исходные математические модели САР — это системы дифференциальных и
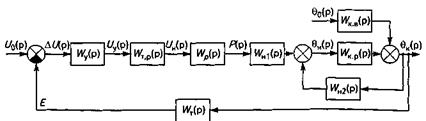
Рис. 1.3. Структурная схема линеаризованной САР температуры в инкубаторе
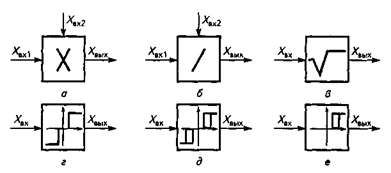
Рис. 1.4. Структурные схемы нелинейных звеньев и элементов:
а — звено, реализующее умножение двух входных величин: хвых = xвх1xвх2; б — звено, реализующее деление одной входной величины на другую (хвых = xвх2/xвх1; в — звено, реализующее извлечение квадратного корня из входной величины (хвых = =  ); г — трехпозиционный релейный элемент с зоной нечувствительности;д — трехпозиционный элемент с зоной нечувствительности и гистерезисом; е — двухпозиционный элемент с зоной нечувствительности и гистерезисом
); г — трехпозиционный релейный элемент с зоной нечувствительности;д — трехпозиционный элемент с зоной нечувствительности и гистерезисом; е — двухпозиционный элемент с зоной нечувствительности и гистерезисом
алгебраических уравнений, а производные от них — передаточные функции и структурные схемы.
Кроме рассмотренных ранее форм представления математических моделей в теории автоматических систем используют математические модели в форме Коши и векторно-матричной форме, изучение которых не предусмотрено типовой программой дисциплины «Автоматика» для агроинженерных специальностей.
В данном учебном пособии использованы математические модели в виде структурных схем, так как в основу ПК «МВТУ», являющегося его программной базой, заложен метод структурного моделирования. Следует подчеркнуть, что с помощью ПК «МВТУ» можно моделировать также'автоматические системы, представленные в форме Коши и векторно-матричной форме.
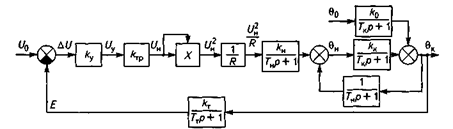
Рис. 1.3. Структурная схема линеаризованной САР температуры в инкубаторе
Рис. 1.4. Структурные схемы нелинейных звеньев и элементов:
а — звено, реализующее умножение двух входных величин: хвых = xвх1xвх2; б — звено, реализующее деление одной входной величины на другую (хвых = xвх2/xвх1; в — звено, реализующее извлечение квадратного корня из входной величины (хвых = = ); г — трехпозиционный релейный элемент с зоной нечувствительности;д — трехпозиционный элемент с зоной нечувствительности и гистерезисом; е — двухпозиционный элемент с зоной нечувствительности и гистерезисом
алгебраических уравнений, а производные от них — передаточные функции и структурные схемы.
Кроме рассмотренных ранее форм представления математических моделей в теории автоматических систем используют математические модели в форме Коши и векторно-матричной форме, изучение которых не предусмотрено типовой программой дисциплины «Автоматика» для агроинженерных специальностей.
В данном учебном пособии использованы математические модели в виде структурных схем, так как в основу ПК «МВТУ», являющегося его программной базой, заложен метод структурного моделирования. Следует подчеркнуть, что с помощью ПК «МВТУ» можно моделировать также'автоматические системы, представленные в форме Коши и векторно-матричной форме.
Рис. 1.5. Структурная схема нелинейной САР температуры в инкубаторе