Основные виды рычажных механизмов.
Основные понятия и определения.
Теория механизмов и машин занимается исследованием и разработкой высокопроизводительных механизмов и машин.
Механизм– совокупность подвижных материальных тел, одно из которых закреплено, а все остальные совершают вполне определенные движения, относительно неподвижного материального тела.
Звенья – материальные тела, из которых состоит механизм.
Стойка– неподвижное звено.
 Стойка изображается ; конфигурация стойки в курсе ТММ не изучается. Звено, к которому изначально сообщается движение, называется входным (начальным, ведущим). Звено, совершающее движение, для выполнения которого предназначен механизм – выходное звено.
Стойка изображается ; конфигурация стойки в курсе ТММ не изучается. Звено, к которому изначально сообщается движение, называется входным (начальным, ведущим). Звено, совершающее движение, для выполнения которого предназначен механизм – выходное звено.

Кривошипно-
Ползунный
Механизм
Рис.1
Если это компрессор, то зв.1 – входное, а зв.3 – выходное.
Если это механизм ДВС, то зв.3 – входное, а зв.1 – выходное.
Кинематическая пара– подвижное соединение звеньев, допускающее их относительное движение. Все кинематические пары на схеме обозначают буквами латинского алфавита, например A, B, C и т.д.

 Если , то К.П. – вращательная ; если , то поступательная.
Если , то К.П. – вращательная ; если , то поступательная.
Порядок нумерации звеньев:
входное звено – 1;
стойка – последний номер.
Звенья бывают:
· простые – состоят из одной детали;
· сложные – состоят из нескольких, жестко скрепленных друг с другом и совершающих одно и тоже движение.
Например, шатунная группа механизма ДВС.
Звенья, соединяясь друг с другом, образуют кинематические цепи, которые разделяют на:
· простые и сложные;
·  замкнутые и разомкнутые;
замкнутые и разомкнутые;
Пример замкнутой кинематической
цепи на рис.1;
пример разомкнутой цепи:
Машина – техническое устройство, в результате осуществления технологического процесса определенного рода, можно автоматизировать или механизировать труд человека.
Машины условно можно разделить на виды:
· энергетические;
· технологические;
· транспортные;
· информационные.
Энергетические машины разделяют на:
· двигатели;
· трансформирующие машины.
Двигатель – техническое устройство, преобразующее один вид энергии в другой. Например, ДВС.
Трансформаторная машина – техническое устройство, потребляющее энергию извне и совершающее полезную работу. Например, насосы, станки, прессы.
Техническое объединение двигателя и технологической (рабочей машины) – Машинный агрегат (МА).

Внешняя Технологический среда процесс
 |
Двигатель имеет определенную механическую характеристику, рабочая машина тоже. Механические характеристики указаны в техпаспорте.
w1 – скорость, с которой вращается вал двигателя;
w2 – скорость, с которой будет вращаться главный вал рабочей машины.
w1 и w2 нужно поставить в соответствие друг другу.
Например, число оборотов n1 =7000 об/мин., а n2=70 об/мин.
Чтобы привести в соответствие механические характеристики двигателя и рабочей машины, между ними устанавливают передаточный механизм, который имеет свои механические характеристики.
up2=w1/w2=700/70=10
В качестве передаточного механизма могут быть использованы:
· фрикционные передачи (с использованием трения);
· цепные передачи (привод мотоцикла);
· зубчатые передачи.
В качестве рабочей машины наиболее часто используют рычажные механизмы.
Основные виды рычажных механизмов.
1. Кривошипно-ползунный механизм.
а) центральный (рис.1);
б) внеосный (дезоксиальный) (рис.2);

е - эксцентриситет
Рис. 2
1-кривошип, т.к. звено совершает полный оборот вокруг своей оси;
2-шатун, не связан со стойкой, совершает плоское движение;
3-ползун (поршень), совершает поступательное движение;
4-стойка.
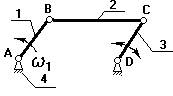 |
2. Четырехшарнирный механизм.
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если зв.1 – кривошип (совершает полный оборот), а зв.3 – коромысло (совершает неполный оборот), то механизм кривошипно-коромысловый.
Если зв.1,3 – коромысла, то механизм двукоромысловый.
3. Кулисный механизм.
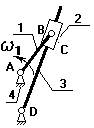 |
1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает полный оборот вокруг А (w1 и w2 одно и тоже), а также движется вдоль зв.3, приводя его во вращение;
3 - коромысло (кулиса).

 |
на зв.3 выбирают точку В3 и выбирают в данный момент так, чтобы она совпадала с точкой В.
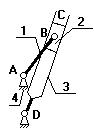
4.Гидроцилиндр
(в кинематическом отношении подобен кулисному механизму).
 |
В процессе проектирования конструктор решает две задачи:
· анализа (исследует готовый механизм);
· синтеза (проектируется новый механизм по требуемым параметрам);
Анализ рычажных механизмов.
В данной главе будут рассмотрены вопросы:
1. структурный анализ механизма (изучение строения механизма);
2. изучение классов и видов кинематических пар.
3. определение числа степеней свободы механизма и определение наличия или отсутствия избыточных связей; в случае наличия – дать рекомендации по способу их устранения;
4. кинематический анализ механизма.