Перед началом матча судья методом жеребьевки выбирает способ расстановки и направление начала движения роботов.
Сумо. Маневрирование.
В этом состязании участникам необходимо подготовить автономного робота, способного наиболее эффективно выталкивать робота-противника за пределы черной линии ринга. Перед началом матча судья методом жеребьевки выбирает способ расстановки и направление начала движения роботов.

Условия состязания
1.1. Состязание проходит между двумя роботами. Цель состязания - вытолкнуть робота-противника за черную линию ринга.
Перед началом матча судья методом жеребьевки выбирает способ расстановки и направление начала движения роботов.
1.3. Если любая часть робота касается поля за пределами черной линии, роботу засчитывается проигрыш в поединке (если используется поле в виде подиума, то проигрыш засчитывается, если любая часть робота касается поверхности вне подиума).
1.4. Если по окончании схватки ни один робот не будет вытолкнут за пределы круга, то выигравшим поединок считается робот, находящийся ближе всего к центру круга.
1.5. Если победитель не может быть определен способами, описанными выше, решение о победе или переигровке принимает судья состязания.
1.6. Во время схваток участники команд не должны касаться роботов.
Поле
2.1. Белый круг диаметром 1 м с чёрной каёмкой толщиной в 5 см.
2.2. В круге красными полосками отмечены стартовые зоны роботов.
2.3. Красной точкой отмечен центр круга.
2.4. Поле может быть в виде подиума высотой 10-20 мм.

Робот
3.1. На роботов не накладывается ограничений на использование каких-либо комплектующих, кроме тех, которые запрещены существующими правилами.*
3.2. Во всё время состязаний:
· Размер робота не должен превышать 250х250х250 мм.
· Вес робота не должен превышать 1 кг.
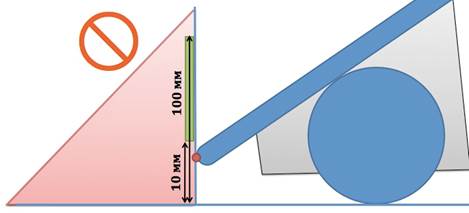
Перед началом раунда робот должен удовлетворять условию: вертикальная поверхность подведённая с любой стороны робота, должна касаться робота в любой точке не ниже 1 см и не выше 10 см. Причем точка(и) касания не должна выйти за указанные пределы при перемещении вертикальной пластины в сторону робота вместе с роботом не менее чем на 3 см. (поверхность на которой стоит робот - ЛДСП). Точка касания фиксируется с любой частью робота, в том числе: колёса, гусеницы, резинки, провода и т.п.


3.4. Робот должен быть автономным.
3.5. Робот, по мнению судей, намеренно повреждающий или пачкающий других роботов, или как-либо повреждающий или загрязняющий покрытие поля, будет дисквалифицирован на всё время состязаний.
3.6. Перед раундом роботы проверяются на габариты, вес, и расстояние деталей до поля.
3.7. Конструктивные запреты:
· Запрещено использование каких-либо клейких приспособлений на колесах и корпусе робота.
· Запрещено использование каких-либо смазок на открытых поверхностях робота.
· Запрещено использование каких-либо приспособлений, дающих роботу повышенную устойчивость, например, создающих вакуумную среду.
· Запрещено создание помех для ИК и других датчиков робота-соперника, а также помех для электронного оборудования.
· Запрещено использовать приспособления, бросающие что-либо в робота-соперника.
· Запрещено использовать жидкие, порошковые и газовые вещества в качестве оружия против робота-соперника.
· Запрещено использовать легковоспламеняющиеся вещества.
· Запрещено использовать конструкции, которые могут причинить физический ущерб рингу или роботу-сопернику.
Роботы, нарушающие вышеперечисленные запреты снимаются с соревнований.
3.8. Между раундами разрешено изменять конструкцию и программу роботов.
3.9. В каждой схватке разрешено запускать разные программы, загруженные в робота.
3.10. Спор между участником и судьёй по пунктам правил 3.x во время проверки робота, всегда решается не в пользу участника.