Краткие теоретические сведения
Лабораторная работа № 1. реакция типовых
Лр №2. Создание моделей линейных непрерывных систем управления
Цель работы:
– освоить способ составления модели в пространстве состояний (SS модели) замкнутой системы управления с использованием схем моделирования отдельных звеньев;
– изучить возможности MATLAB по пребразованию моделей систем управления;
– Использование имитационного моделирования в среде Simulink для исследования замкнутых систем управления по схемам моделирования.
Краткие теоретические сведения
Для получения модели в пространстве состояний системы управления, представленной структурной схемой, можно предложить два способа: 1) построение схем моделирования отдельных звеньев, входящих в структурную схему, соединение их между собой и запись уравнений SS модели; 2) определение передаточной функции замкнутой системы, используя правила преобразования структурных схем, составление по ПФ схемы моделирования системы тем или иным методом и запись уравнений SS модели. Первый способ дает уравнения в реальных физических переменных состояния, второй – в «виртуальных» переменных.
В данной работе используется первый способ.
Для создания различных моделей систем управления в MATLAB имеется пакет Control System Toolbox (CST),позволяющий получить линейные модели в четырех формах:
– SS модель (модель в пространстве состояний);
- TF модель (модель в виде передаточной функции);
- ZPK модель (модель с использованием нулей, полюсов и масштабного коэффициента передаточной функции системы);
- FRD модель (комплексно-частотная характеристика).
SS модель создается командой ss, использующей известные матрицы модели:
sys = ss(a,b,c,d).
TF модель можно создать двумя способами:
– использование tf команды;
– запись предаточной функции в виде отношения двух полиномов переменной Лапласа p (или s).
Для создания модели с помощью команды tf нужно записать
W = tf(num, den),
где numи denпредставляют собой вектора-строки коэффициентов полиномов числителя и знаменателя ПФ в порядке убывания степеней переменной Лапласа.
Использование второго способа подразумевает следующие операции:
а) определение переменной p (или s) как специальной TF модели
б) введение ПФ в виде отношения двух полиномов
ZPK модель можно создать двумя способами:
– использование zpk команды;
– запись предаточной функции в виде отношения двух полиномов, записанных с использованием нулей и полюсов в виде
Для создания модели с помощью команды zpk нужно записать
W = zpk(z,p,k),
где zи pпредставляют собой векторы нулей и полюсов, а k–масштабный коэффициент.
Использование второго способа подразумевает следующие операции:
а) определение переменной p (или s) как специальной ZPK модели;
б) введение ПФ в виде отношения двух полиномов, записанных через нули и полюса; в случае полинома второй степени с комплексно-сопряженными нулями (полюсами) можно вводить сам полином, а не его нули (полюса).
FRD модельхарактеризует систему в частотной области.
Исходными данными для создания FRD модели являются SS, TF или ZPK модели. Для снятия частотных характеристик на вход системы подается ряд частот, и команда frd определяет стационарную реакцию на эти возмущения. Для работы с FRD моделью в m-файле следует записать следующую программу, из которой следует, что исходная модель задана TF моделью, а тестовые сигналы, т.е. частоты, задаются вектором w:
H=tf(num,den); %Исходная модель
w=[1,2,5,10]; %Входные воздействия
H1=frd(H,w). %FRD модель
Для введения массива частот в нужном диапазоне можно использовать функции linspaceиlogspace, котораяпозволяет задатьравномерное распределение точек на равномерной шкале. Она подобна оператору двоеточие ":", но позволяет контролировать число точек.
Команда w=linspace(a,b) генерирует вектор-строку w из 100 точек (по умолчанию), линейно распределенных между a и b, включая и эти точки.
Команда w=linspace(a,b,n) генерирует вектор-строку w из n точек, линейно распределенных между a и b, включая и эти точки.
Команда w=logspace(a,b) генерирует вектор-строку w из 50 логарифимчески распределенных точек между декадами  и
и  .
.
Команда w=logspace(a,b,n) генерирует n точек между декадами  и
и  .
.
Первые три модели взаимно преобразуемы, модель FRD можно получить из любой модели.
На Рис. 2.1 представлена схема, показывающая связи между математическими моделями, представленными в пакете CST.
Рис. 2.1. Схема преобразования моделей в пакете CST
Переход от SS модели к TF и ZPK моделям задается командами:
h1=ss(A,B,C,D) %Создание SS модели
h2=tf(h1) %Переход от SS модели к TF модели
h3=zpk(h1) %Переход от SS модели к ZPK модели
h3=zpk(h2) %Переход от TF модели к ZPK модели
Аналогично можно записать команды, преобразующие ZPK и TF модели, к другим моделям.
Пример 2.1. Задана структурная схема управления (Рис. 2.2), содержащая три звена, соединенные последовательно. Составить SS модель замкнутой системы управления.
Рис. 2.2. Структурная схема управления к примеру 2.1
Передаточные функции звеньев:
 ;
;  ;
;  .
.
Решение.
1) Составление схемы моделирования системы управления.
Схемы моделирования апериодического (Рис. 1.1) и колебательного (Рис. 1.8) звеньев были получены в лабораторной работе №1. Используем эти схемы для получения схемы моделирования замкнутой САУ.
Рис. 2.3. Схема моделирования апериодического звена
Рис. 2.4. Схема моделирования колебательного звена
Постоянные времени, коэффициент демпфирования и коэффициенты в цепях обратных связей схем моделирования звеньев имеют значения:
 с;
с;  ;
;  ;
;
 с;
с;  ;
;  ;
;
 ;
;  .
.
Объединим две схемы в одну, введем единичную обратную связь и расставим переменные состояния: выходному сигналу каждого интегратора соответствует переменная состояния, входному – ее первая производная. В результате получаем схему моделирования (Рис. 2.5).
Рис. 2.5. Схема моделирования замкнутой САУ
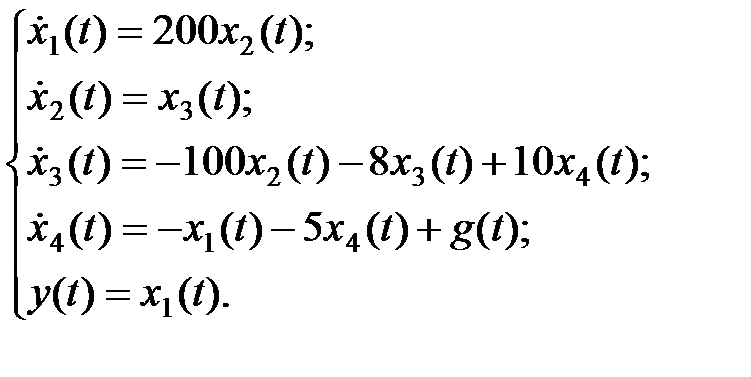
2) Запись уравнений модели в пространстве состояний.
Пусть на выходе последнего интегратора присутствует первая переменная состояния, а на выходе первого – последняя переменная (можно и наоборот). Тогда уравнения состояния и выхода принимают вид:
Матрицы модели:
A= 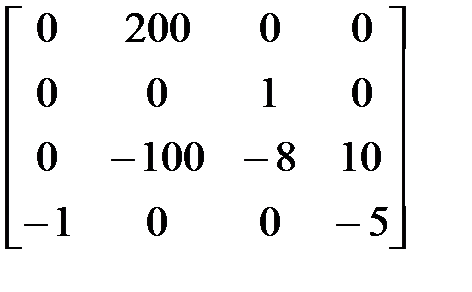 ; B=
; B=  ; C
; C  ; D = 0.
; D = 0.
3) Определение передаточной функции по матрицам SS модели.
Для нахождения ПФ воспользуемся формулой
T(p)=  .
.
Составим вначале матрицу (pЕ–A):
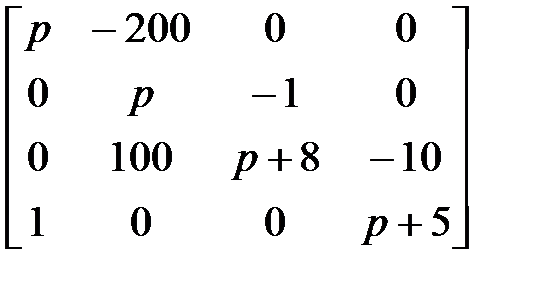 .
.
Затем запишем союзную матрицу  .
.
Напомним способ получения союзной матрицы:
а). Находим алгебраические дополнения элементов исходной матрицы  .
.
б). Составляем из этих дополнений новую матрицу и транспонируем ее.
Используя такой вид союзной матрицы, ее можно записывать сразу для квадратной матрицы порядка n: первый индекс каждого элемента означает номер столбца, а второй – номер строки, т.е.
 .
.
Для получения алгебраического дополнения  элемента aij нужно из определителя квадратной матрицы порядка n вычеркнуть i-ю строку и j-столбец, на пересечении которых стоит элемент aij, и составить из оставшихся элементов определитель порядка n – 1, умножив его на (–1)i+j.
элемента aij нужно из определителя квадратной матрицы порядка n вычеркнуть i-ю строку и j-столбец, на пересечении которых стоит элемент aij, и составить из оставшихся элементов определитель порядка n – 1, умножив его на (–1)i+j.
Запишем союзную матрицу для системы четвертого порядка:
 .
.
Перемножим матрицы, стоящие в числителе формулы для ПФ:
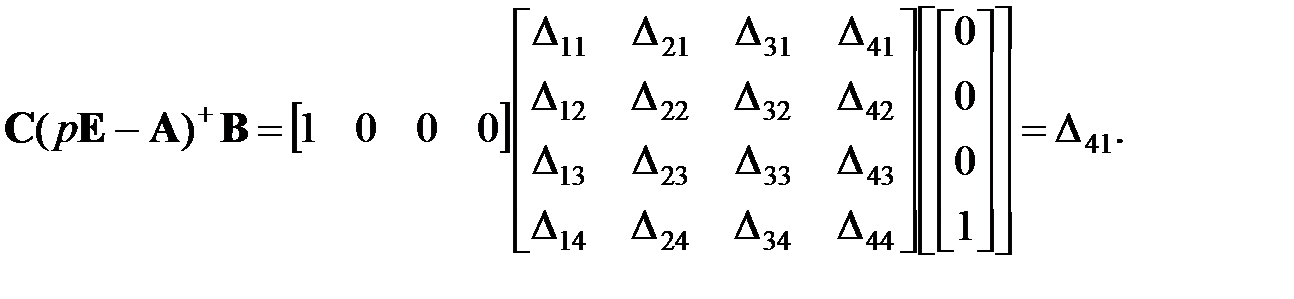
Найдем нужное алгебраические дополнение матрицы (pЕ–A):
 .
.
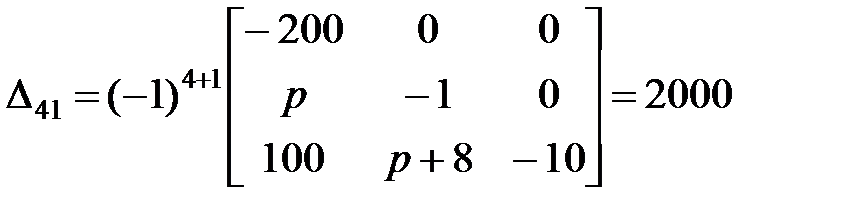
Подсчитаем определитель матрицы (pЕ–A). С этой целью воспользуемся методом разложения определителя по элементам любого ряда (строки или столбца): определитель n-го порядка, соответствующий некоторой матрице (n-го порядка), равен сумме парных произведений элементов любого ряда этой матрицы на их алгебраические дополнения. При этом, естественно, желательно выбирать ряд, содержащий некоторое число нулей. Применим это правило для определителя 4-го порядка матрицы (pЕ–A), раскладывая его по элементам первой строки:
 .
.
Здесь
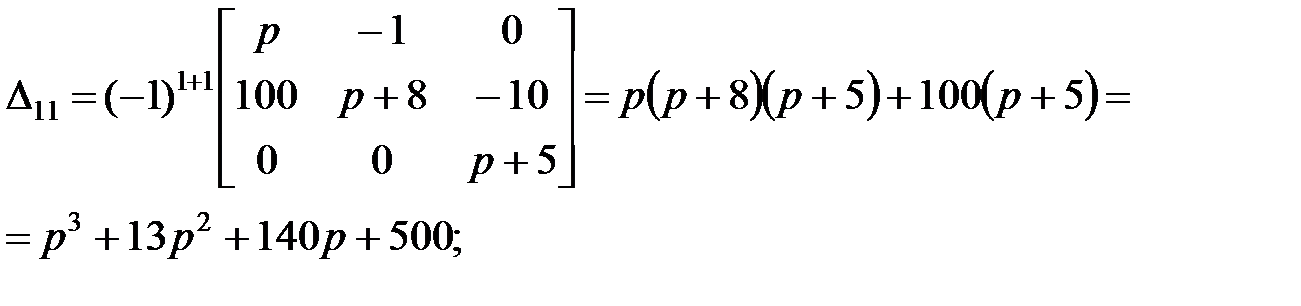 .
.
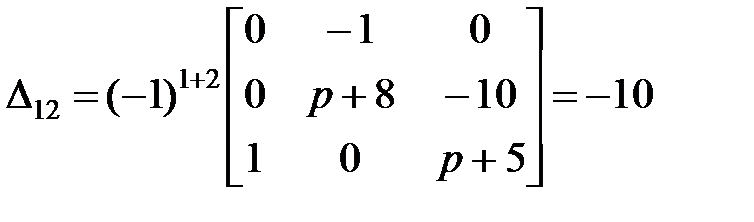 .
.
Следовательно:
 .
.
Передаточная функция системы:

Проверим правильность составления SS модели в Simulink. Для этого соберем две схемы моделирования, используя образцовую модель (модель в виде структурной схемы) и SS модель. Сравнить полученные переходные характеристики на выходах моделей, подавая их на один осциллограф, Рис. 2.6.
Рис. 2.6. Схема для опытной проверки результата моделирования
При правильном моделировании получаются одинаковые переходные характеристики.
4). Создание в MATLAB моделей системы.
% Создание SS модели
% матрицы модели
A=[0 200 0 0;0 0 1 0;0 -100 -8 10;-1 0 0 -5];
B=[0;0;0;1];C=[1 0 0 0];D=0;
Tss=ss(A,B,C,D)
>>SS модель замкнутой системы
a =
x1 x2 x3 x4
x1 0 200 0 0
x2 0 0 1 0
x3 0 -100 -8 10
x4 -1 0 0 -5
b =
u1
x1 0
x2 0
x3 0
x4 1
c =
x1 x2 x3 x4
y1 1 0 0 0
d =
u1
y1 0
% Создание TF модели
% первый способ
num=2000;den=[1 13 140 500 2000];
T=tf(num,den)
>> Transfer function:
-------------------------------------
s^4 + 13 s^3 + 140 s^2 + 500 s + 2000
% второй способ
s=tf('s');
Ts=2000/(s^4+13*s^3+140*s^2+500*s+2000)
>> Transfer function:
-------------------------------------
s^4 + 13 s^3 + 140 s^2 + 500 s + 2000
% Создание ZPK модели
% нули и полюса ПФ замкнутой системы
Z=zero(T), P=pole(T)
>>Z =
Empty matrix: 0-by-1
P =
-4.9231 + 7.8320i
-4.9231 - 7.8320i
-1.5769 + 4.5699i
-1.5769 - 4.5699i
% Масштабный коэффициент ПФ замкнутой системы
K=2000
% первый способ
Tzpk=zpk(Z,P,K)
>>Zero/pole/gain:
---------------------------------------------
(s^2 + 3.154s + 23.37) (s^2 + 9.846s + 85.58)
% второй способ
s=zpk('s');
Tzpk=2000/(s^4+13*s^3+140*s^2+500*s+2000)
>>Zero/pole/gain:
---------------------------------------------
(s^2 + 3.154s + 23.37) (s^2 + 9.846s + 85.58)
% Создание FRD модели
w=linspace(0,8,9);
disp('FRD модель из SS модели')
Hf_ss=frd(Hss,w)
disp('FRD модель из TF модели')
Hf_tf=frd(T,w)
disp('FRD модель из ZPK модели')
Hf_zpk=frd(Hz,w)
Все преобразования по получению FRD модели дают один и тот же результат, а именно:
>> Frequency(rad/s) Response
---------------- --------
0 1.0000 + 0.0000i
1 1.0058 - 0.2632i
2 0.9963 - 0.6131i
3 0.8234 - 1.1523i
4 0.0235 - 1.7120i
5 -1.1429 - 1.1429i
6 -1.1331 - 0.1247i
7 -0.7060 + 0.2753i
8 -0.3754 + 0.3482i
Соберем схему в Simulink, используя LTI Block, Рис. 2.7. Этот блок имитирует любую из трех моделей: SS, TF или ZPK. В окне, обозначенном как LTI system variable, вводится созданная в MATLAB модель, т.е. ее имя. В окне, обозначенном как Initial States, вводится вектор начальных значений переменных состояния.
Рис. 2.7. Схема для опытной проверки результата моделирования
Для удобства визуального отображения входные сигналы смещены друг относительно друга на 0,5 с.