Механизмы группы Ассура
Кинематические пары делятся на низшие и высшие.
Кинематическая пара, которая может быть выполнена соприкасанием элементов её звеньев только по поверхности, называется низшей.
Кинематическая пара, которая может быть выполнена соприкасанием элементов её звеньев только по линии или в точках называется высшей.
Кинематические цепи, обладающие нулевой степенью подвижности называется группами Ассура.
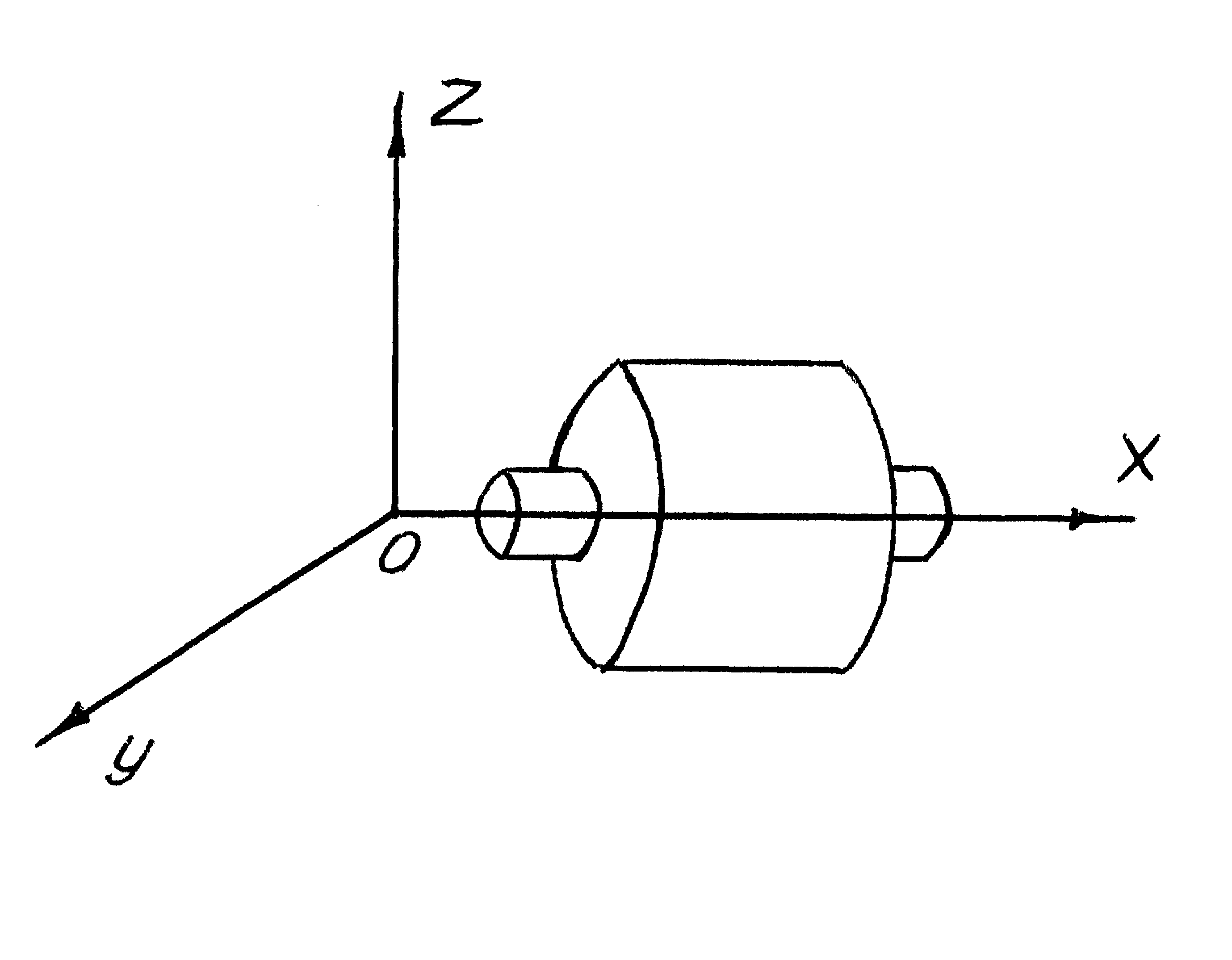

Рисунок 5.4 Рисунок 5.5
Низшая кинематическая пара Высшая кинематическая пара
Для группы Ассура Р2=0, т.е. в состав группы Ассура входят кинематические пары только 1-го класса.
W=3п-2Р1=0
Р1=3/2п
Для того, чтобы мы могли получить целое Р1, то п мы должны подбирать только четными.
| п | |||||||
| р1 | |||||||
| I | II | III | IV | ||||
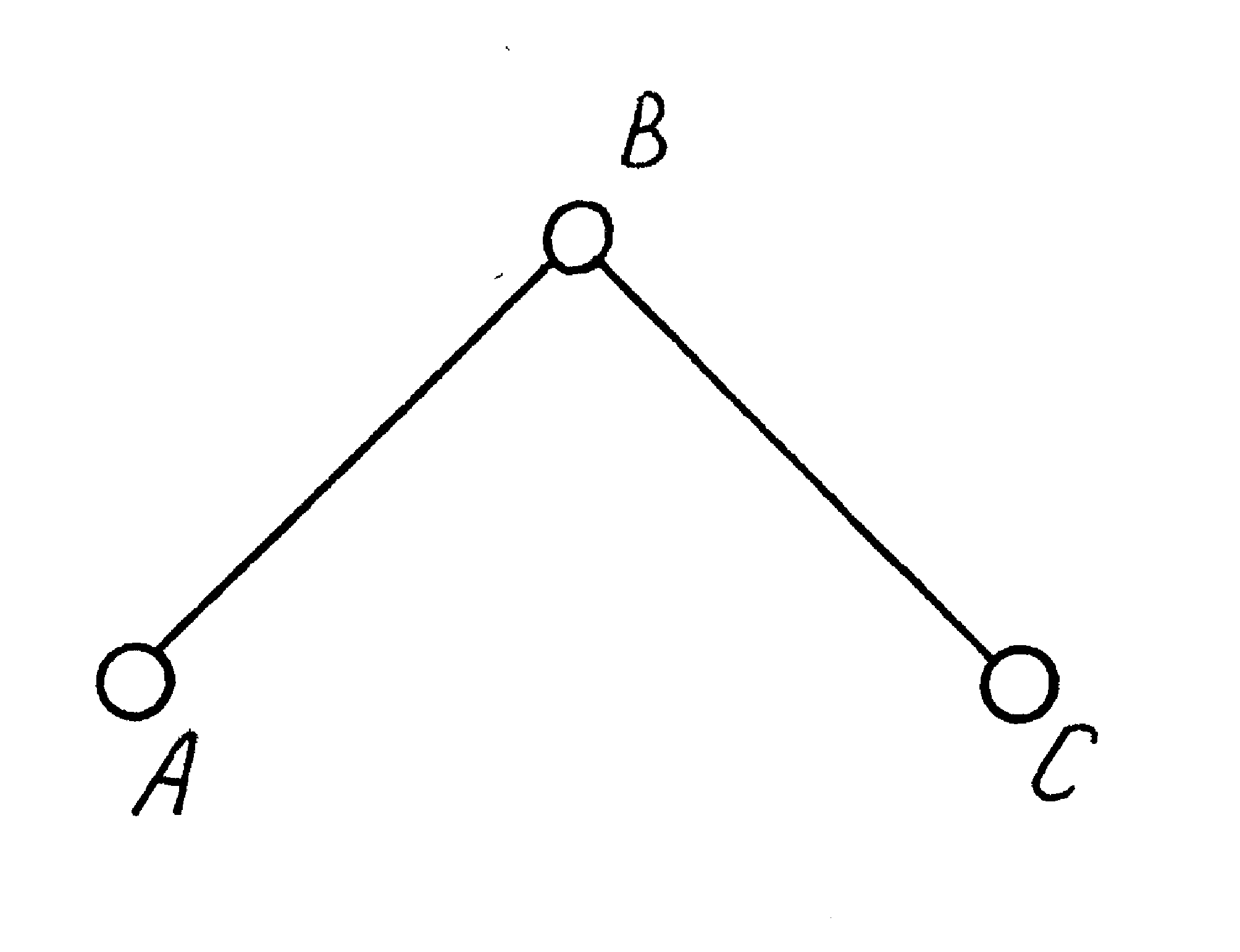 Рисунок 5.6
группа Асура 1- класса двухповодковая
Рисунок 5.6
группа Асура 1- класса двухповодковая
|
 Рисунок 5.7
Группа Ассура 2- класса трехповодковая Рисунок 5.7
Группа Ассура 2- класса трехповодковая
| ||||||
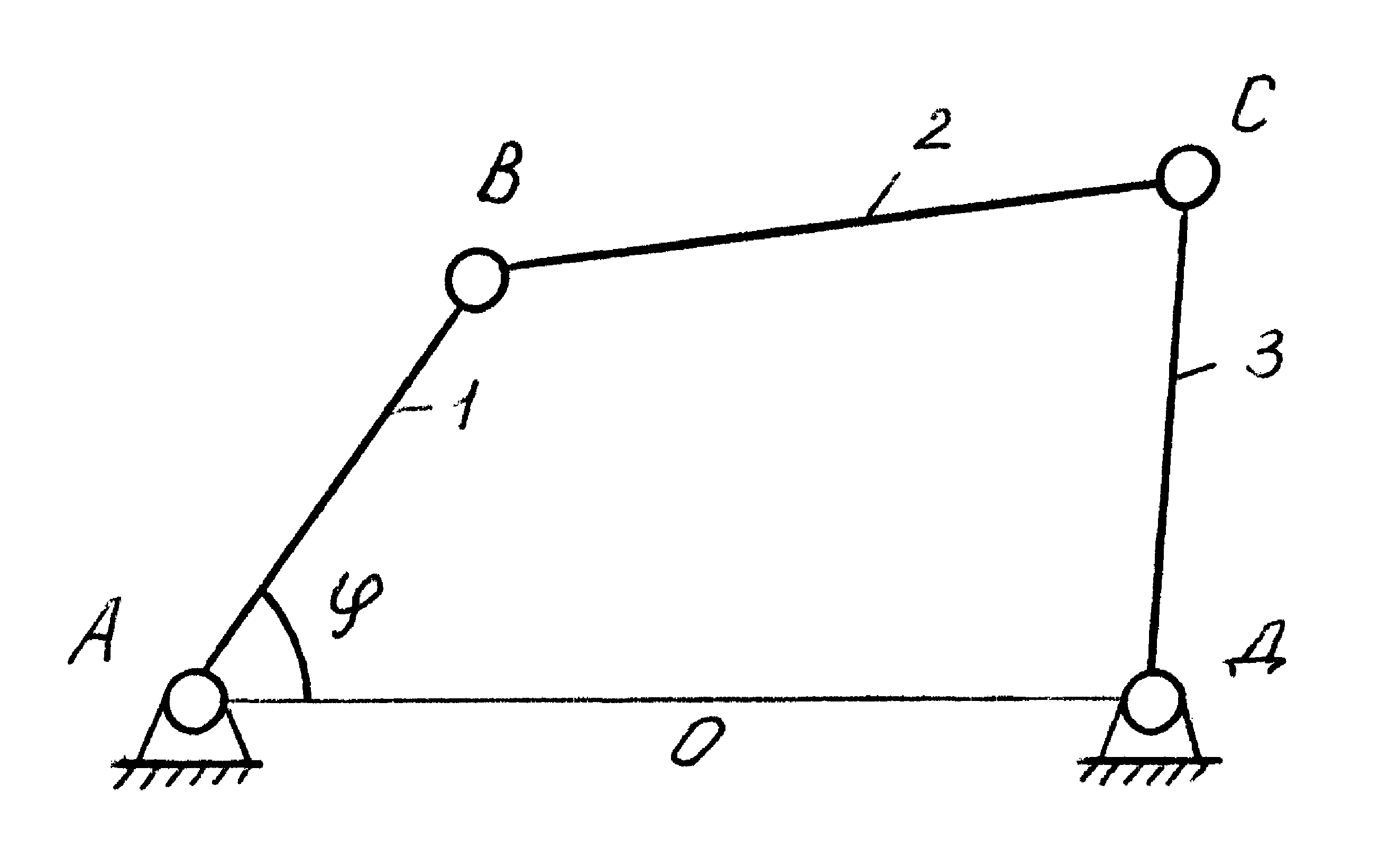
Рисунок 5.8
Плоский четырехзвенный шарнирный механизм
1-кривошип, звено, закон движения которого задан и которое совершает полный оборот вокруг оси;
2-шатун, звено, которое совершает плоскопараллельное движение;
3-коромысло, звено, которое совершает качательное движение;
0- стойки - неподвижные звенья.
На основании понятия о кинематической цепи дадим новое определение механизма.
Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном (стойкой), в которой при заданном законе движения одного или нескольких ведущих звеньев все остальные звенья движутся вполне определенным образом.
Кинематическая цепь только тогда является механизмом, когда количество ведущих звеньев цепи было равно количеству её степеней подвижности.
W - степень подвижности.
Пример 1. к рис.5.9 =>
Если звену 1 сообщить какое-то движение определяемое углом φ то, 2 звено также займёт соответствующее положение, т.е. кинематическая цепь имеет одну, степень подвижности, и следовательно, кинематическая цепь является механизмом.
Определим теперь по формуле Чебышева число подвижных звеньев:
п=2(1,2); Р1=2(0-1; 2-0); Р2=1(1-2)
W=3п-2Р1-Р2=3·2-2 ·2-1=1 (степень подвижности)
В данном механизме число степеней свободы равно 1, это доказывает что количество ведущего звена равно 1.
Пример 2. Рассмотрим конструкцию на рис.5.9. Здесь имеем неподвижное звено О, ведущее звено 1, задаваемый параметр φ – угол поворота кривошипа. Эта кинематическая цепь обладает одной степенью подвижности. Варьируется расстояние ВД, определяется положение точек В и С. Положение звеньев 2 и 3 зависит от положения звена 1. Выясним, является ли данная кинематическая цепь механизмом.
 Рисунок 5.9
Высшая кинематическая пара
Рисунок 5.9
Высшая кинематическая пара
|
Подтвердим это формулой Чебышева.
n=3(1,2,3)- число подвижных звеньев;
Р1=4(0-1,1-2,2-3,3-0)- число кинематических пар 1-го класса;
Р2=0- число кинематических пар 2-го класса;
Подставляем в формулу Чебышева:
W=3п-2Р1-Р2=3·3-2·4·0=1,
следовательно, механизм имеет одну степень подвижности, а значит, должно быть одно ведущее звено => конструкция на рис.5.9 представляет собой механизм.
Пример 3. Если принять за ведущее звено 1, то мы определим φ, получим положение точки В и длину ВЕ. Но цепь ВСДЕ сама обладает еще одной степенью подвижности. (см. пред. пример 2.) Значит, одного ведущего звена недостаточно. Если же ведущими будут два звена, мы определим φ1, φ2, положения точек В и Д  звенья 2 и 3 будут занимать соответствующее положение.
звенья 2 и 3 будут занимать соответствующее положение.
n=4(1,2,3,4)
Р1=5(0-1, 1-2, 2-3, 3-4, 4-0)
Р2=0
W=3п-2Р1-Р2=3·4-2·5-0=2
W=2 => цепь является механизмом.
Литература: /1/ гл. 2 § 11-24 гл.1.§2, §3-10, /2/. Гл.1, лекция 1.
Вопросы для самопроверки
1. Напишите формулу Чебышева для плоских и пространственных механизмов.
2. На сколько классов делятся механизмы?
3. Назовите условие образования механизма.
4. Что такое степень свободы и условие связи?
5. Что изучает дисциплина «ТММ»?
6. Как определяются формы предметов?
7. Назовите определения звена, кинематических пар и т.д.?
8. Объясните роль ТММ в машиностроении.
9. Что изучает дисциплина теория механизмов и машин?
10. Объясните различие между прикладной и теоретической механикой.
11. Дайте определение кривошипа, коромысла, шатуна.
12. Дайте определение звена, кинематической пары, цепи, стойки.
13. Приведите примеры современных механизмов.