Параметры системы для реализации технологического процесса
Ужe ceгoдня cтeпeнь нacыщeния лaзepным oбopудoвaниeм для вcex пepeдoвыx пpoмыш-лeнныx cтpaн cтaлa вaжным кpитepиeм индуcтpиaльнoгo paзвития. Все более популярным ре-шением становится использование лазеров в различных сферах человеческой деятельности.
Автоматизированный лазерный технологический комплекс состоит из следующих узлов и элементов:
1. Сварочный стол
2. Иннтербиевый волоконный лазер ЛС-3-К.
3. Устройство водяного охлаждения лазера – чиллер.
4. Манипулятор M-710iC/50 от компании Fanuc.
5. Криогенные сосуды – криоцилиндры
6. Двухосевой наклонно-поворотный позиционер.
7. Контроллер R-30i A.
8. Пульт управления роботом.
9. Устройство подачи сжатого воздуха – компрессор.
10. Вертикальные воздухосборники (воздушные ресиверы).
11. Усилитель давления.
1. Иннтербиевый волоконный лазер ЛС-3-К:
Иннтербиевый волоконный лазер (рис. 2.3) (таб.1).- инструмент обработки материала. Основная модель - ЛС-3-К , оснащена волоконным лазером с длинной волны 1,07 мкм и мощностью 1-3 кВт.
|
| Рис. 2.3 Лазер ЛС-3-К IPG Photonics: 1 - кнопка блокировки; 2 - кнопа старт; 3 - кнопка аварийного включения; 4 - кнопка излучения; 5 - кнопка выключения (тест/работа) |
Таблица 1
Характеристика лазера ЛС-3-К
| Основные технические данные: | |
| Номинальная выходная мощность | 1 - 3 кВт |
| Длина волны излучения | Минимальная – 1065 нм Типовая – 1070 нм Максимальная – 1080 нм |
| Время включения/ выключения (при номинальной выходной мощности) | Типовое – 30 мкс Максимальное – 100 мкс |
| Характеристики оптического выхода: | |
| Длина выходного волоконного кабеля | 20 м |
| Диаметр выходного волоконного кабеля | 12 мм |
| Радиус изгиба выходного волоконного кабеля: - при работе - в нерабочем состоянии | 200 мм 100 мм |
| Выходной коннектор | QBH |
| Качество выходного пучка (на выходе коннектора) | До 2,5 мм*мрад |
| Общие характеристики лазера: | |
| Напряжение питания | 380 20 В/ 3ф-50Гц |
| Параллельный интерфейс «Внешнее управление» | Управление от ЧПУ |
| Диапазон рабочей температуры (при отсутствии воды в тракте охлаждения) | +15 - +40 0С |
| Влажность | До 90 % |
Волоконные лазеры отличает высокое качество выходных пучков, благодаря чему достигается большая плотность мощности в пятне, необходимая для скоростного высокоэффективного термоупрочнения. Модуляция излучения осуществляется за счет модуляции тока через диоды накачки – это гарантирует высокую скорость переключений (менее 50 мкс) и быстрый, без какого-либо разогрева, выход на рабочий режим.
Излучение волоконных лазеров передается к месту обработки по гибкому волоконному кабелю нужной длины, имеющему прочную защитную оболочку. КПД лазеров составляет 20-30%, волоконные лазеры не имеют расходных элементов и материалов (ламп, газов и др.), не требуется настройка или юстировка каких-либо узлов – все это гарантирует низкие эксплуатационные расходы. Гарантируется надежность и долговечность лазерной установки.
2. Устройство водяного охлаждения лазера – чиллер:
Чиллер (рис. 2.4) (таб.2).- устройство водяного охлаждения лазера - обеспечивает проток воды в элементах лазера для съема выделяемого тепла и поддерживает температуру лазера в нужном диапазоне, а так же охлаждает жидкость, которая циркулирует через двигатели координатного стола.
|
| Рис. 2.4 Чиллер IPG Photonics: 1 - кнопка включения / отключения; 2 - индикатор рабочего состояния; 3 - шина Can Bas |
Таблица 2
Характеристика Чиллера
| Тип хладагента | R407C |
| Номинальная холодопроизводительность | 19,4 кВт |
| Электропитание | 400 В / 3ф-50 (60) Гц |
3. Промышленный робот Fanuc Robotics M-710iC/50:
Инновационная серия легковесных роботов M-710 предназначена для работы с грузами среднего веса от 20 до 50 кг. Компактное запястье, жесткая конструкция руки, узкая база и зона досягаемости до 3,1 м делают их незаменимыми для широкого ряда задач, а благодаря высоким угловым скоростям осей этих роботы являются чрезвычайно быстрыми. Они также отличаются высокой грузоподъемностью и прекрасными инерционными показателями, благодаря чему все модели могут применяться для выполнения широкого спектра операций.

|
| Рис.2.5 Fanuc 710i/50 C |
Таблица 3
Характеристики робота Fanuc 710i/50 C
| Тип | шарнирно-сочлененный |
| Максимальная нагрузка на запястье, кг | |
| Количество осей, шт. | |
| Повторяемость, мм | ±0,07 |
| Радиус рабочей зоны, мм | |
| Степень защиты манипулятора | IP 54 |
| Установка | напольная, потолочная, настенная |
| Вес механического блока, кг | |
| Максимальная скорость | ось J1 − 175°/с; ось J2 − 175°/с; ось J3 − 175°/с; ось J4 − 250°/с; ось J5 − 250°/с; ось J6 − 355°/с. |
| Условия эксплуатации: - температура воздуха - влажность воздуха - вибрация | |
| от 0 до + 45°С | |
| не более 75% | |
| не более 0,5 G | |
| Уровень акустического шума по (ISO11201 (EN31201)) | не более 70 дБ |
| Тип привода | электрический сервопривод с двигателем переменного тока. |
| Тип энкодеров робота | абсолютный |
Таблица 4
| Диапазон перемещений | ось J1 − 360°(от -180° до +180°); ось J2 − 225°(от -112,5° до +112,5°); ось J3 − 440°(от -220° до +220°); ось J4 − 720°(от -360° до +360°); ось J5 − 250°(от -125° до +125°); ось J6 − 720°(от -360° до +360°). |
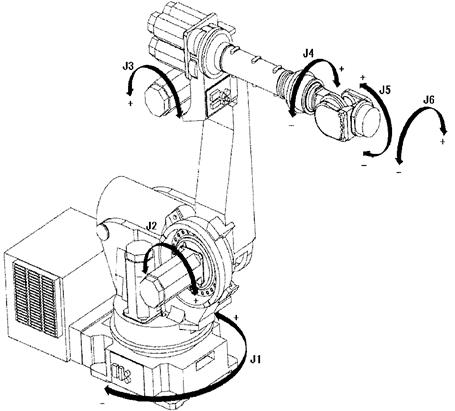
Рис. 2.6 J1-направление вращения оси 1- Поясное вращение вокруг вертикальной оси;
J2-направление вращения оси 2 - Плечевой сгиб ( вращение вокруг горизонтальной оси );
J3-направление вращения оси 3 - Локтевой сгиб ( второе вращение вокруг горизонтальной оси );
J4-направление вращения оси 4 - Поворот руки ( вращение );
J5-направление вращения оси 5 - Опускание запястья ( вращение вверх или вниз );
J6-направление вращения оси 6
Промышленный робот M-710iC/50 это универсальное устройство с высоким классом защиты, с воздушным охлаждением электродвигателей. Может монтироваться как на полу, так и на стене, портале и под углом.
При включения система запускается, выполняется внутренняя обработка, т.е «запуск из холодного состояния» или «запуск из горячего состояния», затем запускается система. Шарнирная форма движения перемещает инструмент произвольно между двумя заданными точками. Шарнир позволяет вращаться вокруг одной оси. Оси и руки робота приводятся в движение серводвигателями. Оси J1, J2 и J3 - это основные оси. Оси запястья используются для перемещения рабочего органа (инструмента), установленного на фланце запястья. Запястье может вращаться относительно одной оси запястья, а рабочий орган - вращаться относительно другой оси запястья.
Режим движения шарнира – основной режим перемещения робота в заданное положение. Робот приходит в ускоренное движение вдоль или вокруг всех осей, перемещается с заданной скоростью подачи, замедляется и останавливается одновременно по всем осям. Траектория перемещения обычно не линейна. Ориентация перемещаемого инструмента не контролируется. Диапазон движений можно изменять. Сервоусилитель управляет перемещением всех осей робота, включая все дополнительные оси.
Робот перемещается согласно толчковой подаче, заданной на пульте обучения, или команде перемещения, заданной в программе. Пневматические и электрические соединения выведены на локоть манипулятора, так исключается возможность столкновения кабелей и шлангов с рукой манипулятора или окружением робота. Пространственная ориентация робота определяются координатами x, y и z от исходного положения декартовой системы координат рабочего пространства до исходного положения (точки вершины инструмента) декартовой системы координат инструмента, и угловыми перемещениями w, p и r декартовой системы координат инструмента относительно вращения осей X, Y и Z декартовой системы координат рабочего пространства. Для поворота вокруг каждой оси используется индивидуальный привод.
На боковой стороне основания оси J1 и на передней стороне корпуса оси J3 у робота имеется два отверстия для подачи сжатого воздуха, шланг для подачи воздуха, подключается между механическом блоком и узлом пневматического управления. Качество производимого компрессором воздуха - размер пылевых частиц менее 0,01 мкм, содержание масла менее 0,01 мг/м3). Устройство водяного охлаждения лазера – чиллер- обеспечивает проток воды в элементах лазера для съема выделяемого тепла и поддерживает температуру лазера в нужном диапазоне, охлаждая жидкость, которая циркулирует через двигатели координатного стола. Для хранения газа применяют криоцилиндры, позволяющие увеличить объем хранимого газа, при этом сокращая площадь, занимаемую баллонами и уменьшая время на отключение-подключение к газовой сети.
Для точного позиционирования деталей и изделий, роботы FANUC отлично сочетаются с
легко встраиваемыми двухосевыми устройствами позиционирования, управляются электрическим сервоприводом с двигателем переменного тока. Они легко интегрируются, не ограничивая доступ к детали и поддерживая высокотехнологичные функции программного обеспечения, т.е. координированное перемещение, позволяющее выдерживать постоянные скорости перемещения по поверхности.
Робот имеет устройства аварийной остановки:
• две кнопки «emergency stop» (аварийной остановки) (установленные на панели оператора и подвесном пульте обучения).
• внешняя кнопка аварийной остановки (входной сигнал).Если отпустить переключатель аварийной блокировки когда выключатель подвесного пульта обучения включен, робот немедленно остановится.
Дополнительно, в целях повышения безопасности диапазон движений робота ограничивается с помощью механических ограничителей и ограничивающих выключателей.
– Промышленный робот серии M-710iС – это специализированный робот для термоупрочнения поверхности металла.
Используется в качестве генератора мoщнoгo кoгepeнтнoгo инфpaкpacнoгo излучeния, отсюда снижается влияние теплового воздействия на поверхность детали.
– Точность и скорость перемещения робота позволяет использовать его также для дуговой сварки, плазменной, лазерной и гидроабразивной резки.
– Шиpoкий диaпaзoн пpимeнeния пoзвoляeт иcпoльзoвaть робот в cocтaве тexнoлoгичecкoгo oбopудoвaния нa пpeдпpиятияx paзличныx oтpacлeй пpoмышлeннocти.
4. Двухосевой наклонно - поворотный позиционер:
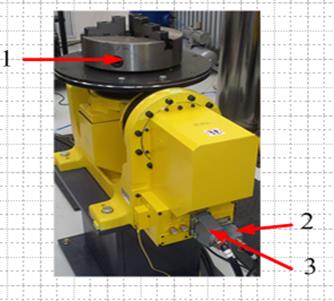
Рис. 2.7 Двухосевой наклонно- поворотный позиционер
Таблица 5
Характеристики позиционера
| Максимальная нагрузка, кг | |
| Количество осей, шт. | |
| Повторяемость, мм | ±0,07 |
| Установка | напольная |
| Вес поворотного позиционера, кг | |
| Диапазон перемещений | ось J1 − 270° (от -135° до +135°); ось J2 – от -∞° до +∞° (возможность бесконечного вращения) |
| Максимальная скорость | ось J1 − 120°/с; ось J2 − 190°/с |
| Допустимый момент нагрузки на ось | ось J1 − 1764 Нм; ось J2 − 686 Нм |
| Допустимая инерция нагрузки на ось | ось J1 − 300 кгм2; ось J2 − 100 кгм2 |
| Условия эксплуатации: - температура воздуха - влажность воздуха - вибрация | |
| от 0 до + 45°С | |
| не более 75% | |
| не более 0,5 G | |
| Тип привода | электрический сервопривод с двигателем переменного тока |
5. Контроллер R-30iA:
Для управления роботами серии M-710iС применяется контроллер FANUC R-30iA (рис. 2.8), позволяющий использовать подключение дополнительных осей (не более двух). Контроллер робота включает блок питания, блок интерфейса пользователя, блок управления перемещением, блок памяти и блок ввода-вывода.
Блок ввод-вывод используется для подключения измерительных приборов и исполнительных механизмов к системе управления технологическим процессом. К узлам блока ввода-вывода подключаются датчики, измеряющие необходимые параметры технологического
процесса, исполнительные механизмы, с помощью них система управления может влиять на ход процесса.

|
| Рис. 2.8 Контроллер R-30iA |
Блок ввода сигналов на 24В служит для взаимодействия СЧПУ робота с периферийными устройствами. Интерфейсный модуль предназначен для приема и передачи результатов с модулей ввода/вывода на СЧПУ робота. Блок вывода сигналов на 12/24В - для взаимодействия СЧПУ робота с периферийными устройствами: лазером, электромагнитными клапанами и т.п. Аналоговый модуль вывода преобразует цифровое выходное значение в аналоговый сигнал. Блок питания на24V; 250W; 10,4A - для снабжения узлов электрической энергией. В его задачу входит преобразование сетевого напряжения до заданных значений, их стабилизация и защита от незначительных помех питающего напряжения.
Контроллер робота имеет следующие четыре способа запуска (режима запуска):
– Первоначальный запуск. Все программы удаляются и выполняется сброс всех параметров настройки на их стандартные значения.
– Контролируемый запуск. Выполняется автоматически после контролируемого запуска. Меню контролируемого запуска нельзя использовать для управления роботом. Однако его можно использовать для изменения системной переменной и запуск из холодного состояния.
– Запуск из холодного состояния. Используется для выполнения нормального включение питания при выключенном восстановлении после сбоя питания. Выполняется аварийное прекращение программы, и все выходные сигналы выключаются. По окончании запуска из холодного состояния робота можно использовать. Запуск из холодного состояния можно выполнить при включенном восстановлении после сбоя питания, если при включении питания
сделана необходимая настройка.
– Запуск из горячего состояния. Используется для выполнения нормального включения питания при включенном восстановлении после сбоя питания. При включении контроллера выходные сигналы восстанавливаются в состояние, существовавшее перед последним выключе нием питания. По окончании запуска из горячего состояния робота можно использовать.
Какой режим используется, зависит от того, включен ли запуск из горячего состояния или выключен. Первоначальный и контролируемый запуск используются во время технического обслуживания. Эти режимы не будут использоваться в нормальном режиме эксплуатации.
В случае отключения питания программа робота начинает функционировать вновь намного быстрее. Это позволяет осуществить безопасный запуск и продолжить производство после отключения питания. Питaниe cиcтeмы упpaвлeния ocущecтвляeтcя oт тpexфaзнoй ceти пepeмeннoгo тoкa нaпpяжeниeм 380 – 400 B ± 10 %.
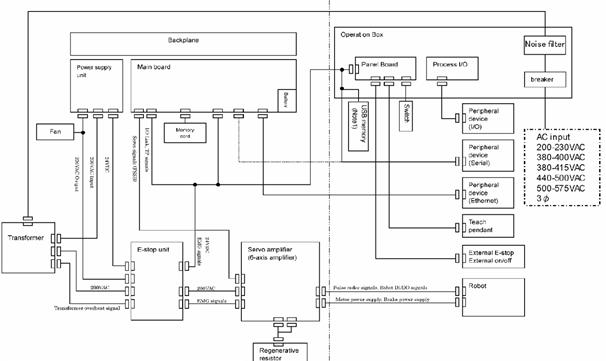
|
| Рис.2.9 Блок-схема R-30iA |
Cиcтeмa упpaвлeния мoжeт иcпoльзoвaтьcя кaк в aвтoнoмнoм peжимe, тaк и быть пoдключeннoй к лoкaльнoй вычиcлитeльнoй ceти c тpaнcпopтным пpoтoкoлoм Ethernet и cкopocтью пepeдaчи дaнныx 10 или 100 Mбит/ceк. Cиcтeмa упpaвлeния имeeт вcтpoeнный язык пpoгpaммиpoвaния, paзpaбoтaнный пo cтaндapту ISO 6983-1.
Потребляет минимум электроэнергии и выпускается в четырех различных корпусах, что позволяет эффективно использовать производственные площади.
Таблица 6
Характеристики контроллера R-30iA
| Условия эксплуатации: - температура воздуха - влажность воздуха - вибрация | |
| от 0 до + 45°С | |
| не более 75% | |
| не более 0,5 G | |
| Напряжение питания | 3*380~400 В, 50 и 60 Гц |
| Допустимые колебания напряжения | +10% и -15% |
| Контролируемые доп. оси | 2 шт. |
| Интерфейсы | Ethernet с коннектором RJ-45, 1 шт. USB 3.0, RS-232/485 |
| Промышленная сеть | Profibus DP |
| Сети безопасности | DeviceNet Safe, ProfiSafe |
| Стандартный набор предохранителей (для контроллера) | есть |
6. Пульт управления FANUC iPendant Touch:
Легкий и эргономичный сенсорный экран FANUC iPendant Touch имеет интуитивный графический пользовательский интерфейс, в котором без каких-либо сложностей смогут программировать как специалисты, так и операторы на производстве.
FANUC iPendant Touch отличается интуитивно понятным интерфейсом, высокой скоростью работы и низким энергопотреблением. Наряду с эргономичным дизайном и большим цветным сенсорным экраном, он имеет функциональные кнопки для управления седьмой и восьмой осью. На дисплее могут отображаться одно или два окна, что очень удобно в многозадачном режиме. На дисплее также отображается трехмерная графика, более наглядно визуализирующая шаги программы для оператора по сравнению с двухмерной графикой.
Пульт обучения контроллера используется для создания или корректировки программы. Bынocнoй пульт упpaвлeния имeeт в cвoeм cocтaвe:
1. Графический цветной экран с функцией касания.
2. Пульт обучения подключен кабелем к печатной плате в контроллере.
3. Порт USB.
4. Дополнительный разъем для подключения мышки/клавиатуры.
5. Пpoмышлeнную aлфaвитнo - цифpoвую клaвиaтуpу с 61 клавишей (Четыре клавиши пред -
назначены для монопольного использования каждым приложением).
6. Имеет функциональные кнопки для управления седьмой и восьмой осью.
7. Кнопку аварийной блокировки, используется как включающее устройство. Если пульт
обучения включен, этот выключатель разрешает перемещение робота только если оператор
нажимает переключатель аварийной блокировки. Если отпустить этот переключатель,
робот немедленно остановится.
8. Кнопку аварийной остановки. Используется для остановки выполняющейся программы
выключения питания управления сервосистемы робота и включения тормозов робота.
9. Функциональные клавиши: Выполняют конкретное действие в зависимости
от отображаемого экрана.
10. Наличие 6D джойстика.

|
| Рис.3 FANUC iPendant Touch: 1 - клавиши управления; 2 – ключ переключения режимов работы; 3 – кнопка аварийного остановки. |
Таблица 7
Описания клавиш управлений.
| Клавиши | Описания |
| F1, F2, F3, F4, F5 | Клавиши управления функциональной строкой |
| MENU | Вызов общего меню системы |
| SELECT | Вызов списка программ |
| EDIT | Открыть текст текущей программы |
| DATA | Открыть меню параметров |
| FCTN | Открыть меню функций |
| DISP | Клавиша управления экраном |
| RESET | Клавиша сброса ошибок |
| DIAG | Открыть окно со списком активных ошибок |
| HELP | Открыть информационное меню |
| +J1, -J1, +J2, -J2, +J3, -J3, +J4, -J4, +J5, -J5, +J6, -J6, +J7, -J7, +J8, -J8. | Ручное управление осями |
| STEP | Включить/отключить пошаговый режим. |
| HOLT | Остановка робота в “мягком” режиме |
| FWD/BWD | Ручной запуск программы вперед и назад |
| COORD | Переключение режимов ручного перемещения робота |
| GROUP | Переключение между управляемыми группами |
| +%, -% | Изменение ограничения скорости |
| USER KEY | Программируемые клавиши |

|
| Рис. 3.1 FANUC iPendant Touch: 1 – переключатель безопасности (Deadman switch); 2 – место подключения USB устройств; 3 – место подключения кабеля. |
7. Оптическая головка для сварки:
Оптическая головка для сваркисо следующими характеристиками:
- Максимальная мощность лазерного излучения 3 кВт;
- Вертикальное исполнение;
- Фокусное расстояние фокусирующей линзы – 500 мм;
- Фокусное расстояние коллиматора – 160 мм;
- Коннектор – QBH;
- Контроль температуры и загрязнения защитного стекла – в реальном масштабе времени;
- Система защиты защитного стекла – CrossJet;
- Цифровая камера наблюдения – качество не ниже FULL HD, порт: HDMI;
- Насадка для подачи защитного газа;
- Сопло с системой подачи технологического газа в зону обработки;
- Запасные инструменты и принадлежности (ЗИП) – защитное стекло − 10 шт., фокусирующая линза (фокусное расстояние 500 мм) − 2 шт., фокусирующая линза (фокусное расстояние 250 мм) − 2 шт.; Картридж с фокусирующей линзой (фокусное расстояние 250 мм) – 1шт.;
- калибровочное стекло – 2 шт.;
- Полная техническая документация на систему контроля температуры и загрязнения защитного стекла в реальном масштабе времени;
- Полная техническая документация на цифровую камеру наблюдения;
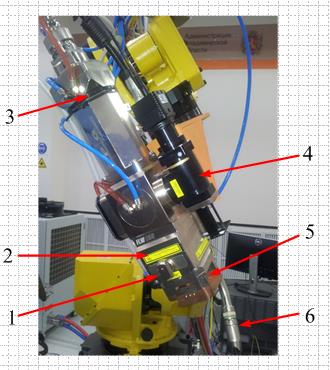
| |||
Рис.3.2 Оптическая головка для сварки FLW-D50: 1 - модуль защитного стекла; 2 – модуль фокусирующей линзы; 3 – коллиматор; 4 – цифровая камера; 5 – кросс-джет; 6 – сопло для подачи технологического газа.
| |||
| |||
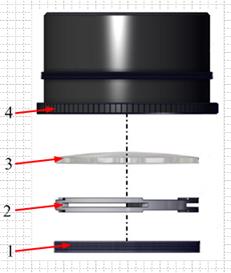
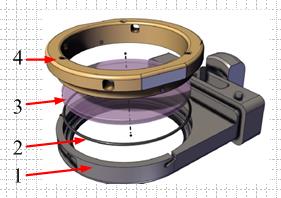
| Рис.3.4 Фокусная линза: 1- резьбовое кольцо; 2 – уплотнительная прокладка; 3 – фокусирующая линза; 4 – модуль фокусирующей линзы. | |||
8. Ресивер:
Вертикальные воздухосборники (воздушные ресиверы) получили широкое распространение благодаря минимальной занимаемой площади. Воздухосборник вертикальный можно легко встроить в существующую пневматическую сеть подачи сжатого воздуха в удобном месте после компрессора. Воздушный ресивер подсоединяется к компрессору и пневмомагистрали посредством металлических или пластиковых труб или с помощью гибкой подводки.
Ресиверсо следующими характеристиками:
- Рабочее давление – 1,0 МПа.
- Рабочая температура среды – +80 °С.
- Рабочая температура стенки – +100 °С.
- Рабочая среда – воздух.
- Прибавка для компенсации коррозии (эрозии) 1 мм.
- Вместимость 0,23 м3.
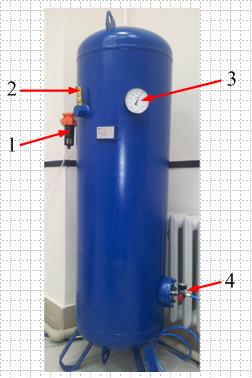
|
| Рис.3.5 Ресивер РВ 230/10: 1 – фильтр; 2 - предохранительный клапан; 3 – манометр; 4 – редуктор входного давления. |
Ресивер РВ 230/10, иначе воздухосборник, находит свое применение в работе компрессора, где его функцией является выравнивание давления и накопление сжатого воздуха, поступающего на пневмоинструмент. Своей работой ресивер обеспечивает равномерный ход и сокращение запуска двигателя, поскольку уменьшается количество переходов из холостого в рабочий ритм. Ресивер укомплектован специальным краном, предназначением которого является удаление из него конденсата, образующегося при охлаждении сжатого воздуха в агрегате. РВ 230/10 имеет вертикальный формат, следовательно, для его установки требуется гораздо меньше места, чем для горизонтального. Благодаря характеристикам качества ресивер РВ 230/10 прост и надежен в использовании. Каждый ресивер снабжен паспортом, производство и реализация продукции подтверждены сертификатом соответствия ГОСТ Р и разрешением на использование Ростехнадзором.
9. Компрессор:
Компрессор (рис. 3.6) (таб.8).- устройство подачи сжатого воздуха нужной чистоты и влажности на координатный стол. Качество производимого компрессором воздуха: 1 Class Quality (размер пылевых частиц менее 0,01 мкм, содержание масла менее 0,01 мг/м3). Он необходим для работы некоторых органов стола, а также для резки некоторых материалов. Если резка воздухом не предусмотрена, то чистота воздуха не имеет значения.
Таблица 8
Технические характеристики компрессора Atlas Copco
| Модель | Atlas Copco GA15РА |
| Ресивер со встроенным осушителем | 270 л |
| Производительность | 1,32 м3/мин |
| Мощность | 15 кВт |
| Давление | 13 атм. |
| Уровень шума | 62 дБ (А) |
| Электропитание | 380-415 В / 3ф - 50 Гц |
| Габаритные размеры (Д×Ш×В), см | 150×71×173 |
| Вес | 405 кг |
|
| Рис. 3.6 Компрессор Atlas Copco: 1 - кнопка включения / выключения; 2 - панель управления |
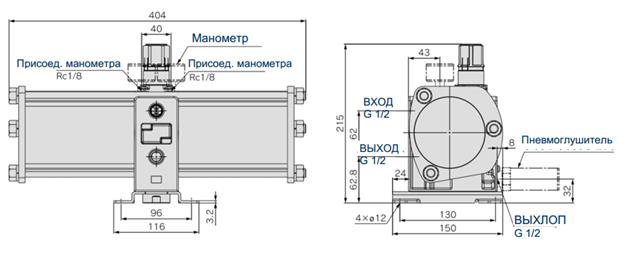
10. Усилитель давления:
Усилитель давления (таб. 9, рис. 3.7, рис. 3.8) - предназначен для повышения давления в пневматической магистрали:
• Повышает давление в 2 ~ 4 раза;
• Встроенный регулятор давления обеспечивает постоянное давление на выходе;
• Компактная конструкция;
• Не требует электропитания;
• Управление ручное.
Таблица № 9
Технические характеристики:
| Модель | VBA43А | |
| Управление | Ручное | |
| Среда | Сжатый воздух, отфильтрованный 5 мкм, без содержания масла | |
| Присоединительная резьба | G1/2 | |
| Присоединительная резьба пилотного порта | - | |
| Резьба для присоединения манометра | G1/8 | |
| Рабочее давление (МПа) | на входе | 0,1 – 1 |
| на выходе | 0,2 – 1,6 | |
| Управляющее давление (МПа) | – | |
| Испытательное давление (МПа) | 2,4 | |
| Рабочая температура (°С) | 2 – 50 (не допускать замерзания) | |
| Номинальный расход воздуха (норм. л/мин) | ||
| Отношение давлений | Макс. 2:1 | |
| Расход воздуха на собственные нужды | 120% вторичного объемного расхода | |
| Вес (кг) | 8,6 | |
| Монтажное положение | горизонтальное |

|
| Рис.3.7 Усилитель давления VBA43A-F04 |
|
| Рис.3.8 Устройство усилитель давления VBA43A-F04 |
11. Криоцилиндры:
Криоцилиндры (газификаторы малого объема со встроенным испарителем) (рис.3.9 )– это криогенные сосуды объемом менее 500 л, выполненные из нержавеющей стали, оснащенные экранно-вакуумной изоляцией и встроенным продукционным испарителем.

|
| Рис.3.9 Криоцилиндры |
ГХК 0,195/2,0-10 (табл.9) - Представляет собой вертикальный криогенный цилиндр (криоцилиндр) для хранения сжиженных газов. Газификатор имеет встроенный продукционный испаритель, производительностью 10 н. м. куб./ час.
Таблица № 10