Лекция №7: Организация связи микроконтроллера с внешней средой и временем
4.5. Таймеры и процессоры событий
Большинство задач управления, которые реализуются с помощью МК, требуют исполнения их в реальном времени. Под этим понимается способность системы получить информацию о состоянии управляемого объекта, выполнить необходимые расчетные процедуры и выдать управляющие воздействия в течение интервала времени, достаточного для желаемого изменения состояния объекта.
Возлагать функции формирования управления в реальном масштабе времени только на центральный процессор неэффективно, так как это занимает ресурсы, необходимые для расчетных процедур. Поэтому в большинстве современных МК используется аппаратная поддержка работы в реальном времени с использованием таймера (таймеров).
Модули таймеров служат для приема информации о времени наступления тех или иных событий от внешних датчиков событий, а также для формирования управляющих воздействий во времени.
Модуль таймера 8-разрядного МК представляет собой 8-ми или 16-разрядный счетчик со схемой управления. Схемотехникой МК обычно предусматривается возможность использования таймера в режиме счетчика внешних событий, поэтому его часто называют таймером/счетчиком. Структура типичного 16-разрядного таймера/счетчика в составе МК приведена на рис. 4.5.

Рис. 4.5. Структура модуля таймера/счетчика.
В памяти МК 16-разрядный счетчик отображается двумя регистрами: TH - старший байт счетчика, TL - младший байт. Регистры доступны для чтения и для записи. Направление счета - только прямое, то есть при поступлении входных импульсов содержимое счетчика инкрементируется. В зависимости от настройки счетчик может использовать один из источников входных сигналов:
импульсную последовательность с выхода управляемого делителя частоты fBUS;
сигналы внешних событий, поступающие на вход TOCKI контроллера.
В первом случае говорят, что счетчик работает в режиме таймера, во втором - в режиме счетчика событий. При переполнении счетчика устанавливается в "единицу" триггер переполнения TF, который генерирует запрос на прерывание, если прерывания от таймера разрешены. Пуск и останов таймера могут осуществляться только под управлением программы. Программным способом можно также установить старший и младший биты счетчика в произвольное состояние или прочитать текущий код счетчика.
Рассмотренный "классический" модуль таймера/счетчика широко применяется в различных моделях относительно простых МК. Он может использоваться для измерения временных интервалов и формирования последовательности импульсов. Основными недостатками "классического" таймера/счетчика являются:
потери времени на выполнение команд пуска и останова таймера, приводящие к появлению ошибки при измерении временных интервалов и ограничивающие минимальную длительность измеряемых интервалов времени единицами мс;
сложности при формировании временных интервалов (меток времени), отличных от периода полного коэффициента счета, равного (Kдел/fBUS) · 216;
невозможность одновременного обслуживания (измерения или формирования импульсного сигнала) сразу нескольких каналов.
Первые из двух перечисленных недостатков были устранены в усовершенствованном модуле таймера/счетчика, используемом в МК семейства MCS-51 (Intel). Дополнительная логика счетного входа позволяет тактовым импульсам поступать на вход счетчика, если уровень сигнала на одной из линий ввода равен "1". Такое решение повышает точность измерения временных интервалов, так как пуск и останов таймера производится аппаратно. Также в усовершенствованном таймере реализован режим перезагрузки счетчика произвольным кодом в момент переполнения. Это позволяет формировать временные последовательности с периодом, отличным от периода полного коэффициента счета.
Однако эти усовершенствования не устраняют главного недостатка модуля "классического" таймера - одноканального режима работы. Совершенствование подсистемы реального времени МК ведется по следующим направлениям:
увеличение числа модулей таймеров/счетчиков. Этот путь характерен для фирм, выпускающих МК со структурой MCS-51, а также для МК компаний Mitsubishi и Hitachi;
модификация структуры модуля таймера/счетчика, при которой увеличение числа каналов достигается не за счет увеличения числа счетчиков, а за счет введения дополнительных аппаратных средств входного захвата (input capture - IC) и выходного сравнения (output compare - OC). Такой подход используется, в частности, в МК компании Motorola.
Принцип действия канала входного захвата таймера/счетчика иллюстрирует рис. 4.6.
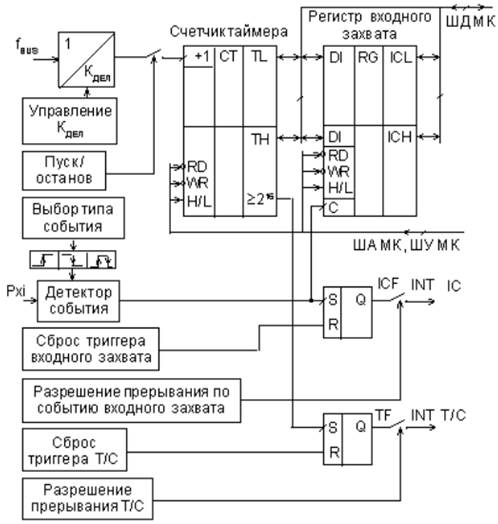
Рис. 4.6. Структурная схема канала входного захвата таймера.
Схема детектора события "наблюдает" за уровнем напряжения на одном из входов МК. Чаще всего это одна из линий порта ввода/вывода. При изменении уровня логического сигнала с "0" на "1" и наоборот вырабатывается строб записи, и текущее состояние счетчика таймера записывается в 16-разрядный регистр входного захвата. Описанное действие в микропроцессорной технике называют событием захвата. Предусмотрена возможность выбора типа сигнала на входе, и это воспринимается как событие:
положительный (передний) фронт сигнала;
отрицательный (задний) фронт сигнала;
любое изменение логического уровня сигнала.
Выбор типа события захвата устанавливается в процессе инициализации таймера и может неоднократно изменяться в ходе выполнения программы. Каждое событие захвата приводит к установке в "1" триггера входного захвата и появлению на его выходе флага (признака) входного захвата ICF. Состояние триггера входного захвата может быть считано программно, а если прерывания по событию захвата разрешены - формируется запрос на прерывание INT IC.
Использование режима входного захвата позволяет исключить ошибки измерения входного интервала времени, связанные со временем перехода к подпрограмме обработки прерывания, так как копирование текущего состояния счетчика осуществляется аппаратными, а не программными средствами. Однако время перехода на подпрограмму обработки прерывания накладывает ограничение на длительность измеряемого интервала времени, так как предполагается, что второе событие захвата произойдет позже, чем код первого события будет считан МК.
Структура аппаратных средств канала выходного сравнения представлена на рис. 4.7.
Цифровой компаратор непрерывно сравнивает текущий код счетчика таймера с кодом, который записан в 16-разрядном регистре выходного сравнения. В момент равенства кодов на одном из выходов МК (Pxj на рис. 4.7) устанавливается заданный уровень логического сигнала. Обычно предусмотрено три типа изменения сигнала на выходе Pxj в момент события выходного сравнения:
установка высокого логического уровня;
установка низкого логического уровня;
инвертирование сигнала на выходе.
При наступлении события сравнения устанавливаются в "1" триггер выходного сравнения и соответствующий ему признак выходного сравнения OCF. Аналогично режиму входного захвата состояние триггера выходного сравнения может быть считано программно, а если прерывания по событию сравнения разрешены - формируется запрос на прерывание INT OC.
Режим выходного сравнения предназначен, прежде всего, для формирования временных интервалов заданной длительности. Длительность сформированного временного интервала определяется только разностью кодов, последовательно загружаемых в регистр выходного сравнения, и не зависит от программного обеспечения МК. Время, необходимое для записи нового значения кода в регистр канала сравнения, ограничивает минимальную длительность формируемого временного интервала.

Рис. 4.7. Структурная схема канала выходного сравнения таймера.
Модули усовершенствованного таймера используются в составе МК в различных модификациях. При этом число каналов входного захвата и выходного сравнения в модуле может быть различным. Так, в МК семейства HC05 фирмы Motorola типовыми решениями являются модули 1IC+1OC или 2IC+2OC, а модуль таймера в составе МК только один. В ряде модулей каналы могут быть произвольно настроены на функцию входного захвата или выходного сравнения посредством инициализации. Счетчик модуля усовершенствованного таймера может не иметь функции программного останова. В этом случае состояние счетчика нельзя синхронизировать с каким-либо моментом работы МК, и такой счетчик характеризуется как свободно считающий (free counter).
Аппаратные средства усовершенствованного таймера позволяют решить многие задачи управления в реальном времени. Однако по мере роста сложности алгоритмов управления отчетливо проявляются ограничения модулей усовершенствованного таймера, а именно:
недостаточное число каналов захвата и сравнения, принадлежащих одному счетчику временной базы. Это не позволяет сформировать синхронизированные между собой многоканальные импульсные последовательности;
однозначно определенная конфигурация канала (или захват или сравнение) часто не удовлетворяет потребностям решаемой задачи;
формирование сигналов по методу широтно-импульсной модуляции (ШИМ) требует программной поддержки, что снижает максимально достижимую частоту выходного сигнала.
Поэтому следующим этапом развития модулей подсистемы реального времени МК стали модули процессоров событий. Впервые модули процессоров событий были использованы компанией Intel в МК семейства 8xC51Fx. Этот модуль получил название программируемого счетного массива (Programmable Counter Array - PCA).
РСА обеспечивает более широкие возможности работы в реальном масштабе времени и в меньшей степени расходует ресурсы центрального процессора, чем стандартный и усовершенствованный таймеры/счетчики. К преимуществам РСА также можно отнести более простое программирование и более высокую точность. К примеру, РСА может обеспечить лучшее временное разрешение, чем таймеры 0, 1 и 2 МК семейства MCS-51, так как счетчик РСА способен работать с тактовой частотой, втрое большей, чем у этих таймеров. РСА также может решать многие задачи, выполнение которых с использованием таймеров требует дополнительных аппаратных затрат (например, определение фазового сдвига между импульсами или генерация ШИМ-сигнала). РСА состоит из 16-битного таймера-счетчика и пяти 16-битных модулей сравнения-защелки, как показано на рис. 4.8.
Таймер-счетчик РСА используется в качестве базового таймера для функционирования всех пяти модулей сравнения-защелки. Вход таймера-счетчика РСА может быть запрограммирован на счет сигналов от следующих источников:
выход делителя на 12 тактового генератора МК;
выход делителя на 4 тактового генератора МК;
сигнал переполнения таймера 0;
внешний входной сигнал на выводе ЕСI (P1.2).

Рис. 4.8. Структура процессора событий МК семейства Intel 8xC51Fx.
Любой из модулей сравнения-защелки может быть запрограммирован для работы в следующих режимах:
защелкивания по фронту и/или спаду импульса на входе CEXi;
программируемого таймера;
высокоскоростного выхода;
широтно-импульсного модулятора.
Модуль 4 может быть также запрограммирован как сторожевой таймер (Watchdog Timer - WDT).
Режим защелкивания по импульсу на входе МК эквивалентен режиму входного захвата (IC ) усовершенствованного таймера. Режимы программируемого таймера и высокоскоростного выхода близки по своим функциональным возможностям к режиму выходного сравнения (OC).
В режиме ШИМ на соответствующем выводе МК формируется последовательность импульсов с периодом, равным периоду базового таймера/счетчика PCA. Значение 8-разрядного кода, записанное в младший байт регистра-защелки соответствующего модуля задает скважность формируемого сигнала. При изменении кода от 0 до 255 скважность меняется от 100 % до 0,4 %.
Режим ШИМ очень прост с точки зрения программного обслуживания. Если изменения скважности не предполагается, то достаточно один раз занести соответствующий код в регистр данных модуля, проинициализировать режим ШИМ, и импульсная последовательность будет воспроизводиться с заданными параметрами без вмешательства программы.
Назначение и особенности работы сторожевого таймера будут рассмотрены далее отдельно.
При работе модуля сравнения-защелки в режиме защелки, программируемого таймера или высокоскоростного выхода модуль может сформировать сигнал прерывания. Сигналы от всех пяти модулей сравнения-защелки и сигнал переполнения таймера РСА разделяют один вектор прерывания. Иными словами, если прерывания разрешены, то и сигнал переполнения таймера PCA и сигнал от любого из модулей вызывают одну и ту же подпрограмму прерываний, которая должна сама идентифицировать источник, вызвавший ее.
Для работы с внешними устройствами таймер-счетчик РСА и модули сравнения-защелки используют выводы P1 порта МК. Если какой-либо вывод порта не используется при работе РСА, или РСА не задействован, порт может применяться стандартным образом.
Реализованный в 8xC51FX PCA оказался настолько удачным, что архитектура данных МК стала промышленным стандартом де-факто, а сам PCA многократно воспроизводился в различных модификациях микроконтроллеров разных фирм.
Тенденция развития подсистемы реального времени современных МК находит свое отражение в увеличении числа каналов процессоров событий и расширении их функциональных возможностей.
4.6. Модуль прерываний МК
Обработка прерываний в МК происходит в соответствии с общими принципами обработки прерываний в МПС. Модуль прерываний принимает запросы прерывания и организует переход к выполнению определенной прерывающей программы. Запросы прерывания могут поступать как от внешних источников, так и от источников, расположенных в различных внутренних модулях МК. В качестве входов для приема запросов от внешних источников чаще всего используются выводы параллельных портов ввода/вывода, для которых эта функция является альтернативной. Источниками запросов внешних прерываний также могут быть любые изменения внешних сигналов на некоторых специально выделенных линиях портов ввода/вывода.
Источниками внутренних запросов прерываний могут служить следующие события:
переполнение таймеров/счетчиков;
сигналы от каналов входного захвата и выходного сравнения таймеров/счетчиков или от процессора событий;
готовность памяти EEPROM;
сигналы прерывания от дополнительных модулей МК, включая завершение передачи или приема информации по одному из последовательных портов и другие.
Любой запрос прерывания поступает на обработку, если прерывания в МК разрешены и разрешено прерывание по данному запросу. Адрес, который загружается в программный счетчик при переходе к обработке прерывания, называется "вектор прерывания". В зависимости от организации модуля прерываний конкретного МК различные источники прерываний могут иметь разные векторы или использовать некоторые из них совместно. Использование различными прерываниями одного вектора обычно не вызывает проблем при разработке программного обеспечения, так как аппаратная часть МК фиксирована, а контроллер чаще всего выполняет одну-единственную программу.
Вопрос о приоритетах при одновременном поступлении нескольких запросов на прерывание решается в различных МК по-разному. Есть МК с одноуровневой системой приоритетов (все запросы равноценны), многоуровневой системой с фиксированными приоритетами и многоуровневой программируемой системой приоритетов.
Отдельно необходимо описать аппаратные прерывания, связанные с включением питания, подачей сигнала "сброс" и переполнением сторожевого таймера. Они имеют немаскируемый характер и чаще всего разделяют один общий вектор прерывания. Это вполне логично, поскольку результатом каждого из событий является начальный сброс МК.
Лекция №8: Вспомогательные аппаратные средства микроконтроллера
4.7. Минимизация энергопотребления в системах на основе МК
Малый уровень энергопотребления является зачастую определяющим фактором при выборе способа реализации цифровой управляющей системы. Современные МК предоставляют пользователю большие возможности в плане экономии энергопотребления и имеют, как правило, следующие основные режимы работы:
активный режим (Run mode) - основной режим работы МК. В этом режиме МК исполняет рабочую программу, и все его ресурсы доступны. Потребляемая мощность имеет максимальное значение PRUN. Большинство современных МК выполнено по КМОП-технологии, поэтому мощность потребления в активном режиме сильно зависит от тактовой частоты;
режим ожидания (Wait mode, Idle mode или Halt mode). В этом режиме прекращает работу центральный процессор, но продолжают функционировать периферийные модули, которые контролируют состояние объекта управления. При необходимости сигналы от периферийных модулей переводят МК в активный режим, и рабочая программа формирует необходимые управляющие воздействия. Перевод МК из режима ожидания в рабочий режим осуществляется по прерываниям от внешних источников или периферийных модулей, либо при сбросе МК. В режиме ожидания мощность потребления МК PWAIT снижается по сравнению с активным режимом в 5:10 раз;
режим останова (Stop mode, Sleep mode или Power Down mode). В этом режиме прекращает работу как центральный процессор, так и большинство периферийных модулей. Переход МК из состояния останова в рабочий режим возможен, как правило, только по прерываниям от внешних источников или после подачи сигнала сброса. В режиме останова мощность потребления МК PSTOP снижается по сравнению с активным режимом примерно на три порядка и составляет единицы микроватт.
Два последних режима называют режимами пониженного энергопотребления. Минимизация энергопотребления системы на МК достигается за счет оптимизации мощности потребления МК в активном режиме, а также использования режимов пониженного энергопотребления. При этом необходимо иметь в виду, что режимы ожидания и останова существенно отличаются временем перехода из режима пониженного энергопотребления в активный режим. Выход из режима ожидания обычно происходит в течение 3:5 периодов синхронизации МК, в то время как задержка выхода из режима останова составляет несколько тысяч периодов синхронизации. Кроме снижения динамики работы системы значительное время перехода в активный режим является причиной дополнительного расхода энергии.
Мощность потребления МК в активном режиме является одной из важнейших характеристик контроллера. Она в значительной степени зависит от напряжения питания МК и частоты тактирования.
В зависимости от диапазона питающих напряжений все МК можно разделить на три основные группы:
МК с напряжением питания 5,0 В+10%. Эти МК предназначены, как правило, для работы в составе устройств с питанием от промышленной или бытовой сети, имеют развитые функциональные возможности и высокий уровень энергопотребления.
МК с расширенным диапазоном напряжений питания: от 2,0:3,0 В до 5,0-7,0 В. МК данной группы могут работать в составе устройств как с сетевым, так и с автономным питанием.
МК с пониженным напряжением питания: от 1,8 до 3 В. Эти МК предназначены для работы в устройствах с автономным питанием и обеспечивают экономный расход энергии элементов питания.
Зависимость тока потребления от напряжения питания МК почти прямо пропорциональная. Поэтому снижение напряжения питания весьма существенно понижает мощность потребления МК. Необходимо, однако, иметь в виду, что для многих типов МК с понижением напряжения питания уменьшается максимально допустимая частота тактирования, то есть выигрыш в потребляемой мощности сопровождается снижением производительности системы.
Большинство современных МК выполнено по технологии КМОП, поэтому мощность потребления в активном режиме PRUN практически прямо пропорциональна тактовой частоте. Поэтому, выбирая частоту тактового генератора, не следует стремиться к предельно высокому быстродействию МК в задачах, которые этого не требуют. Часто определяющим фактором оказывается разрешающая способность измерителей или формирователей временных интервалов на основе таймера или скорость передачи данных по последовательному каналу.
В большинстве современных МК используется статическая КМОП-технология, поэтому они способны работать при сколь угодно низких тактовых частотах вплоть до нулевых. В справочных данных при этом указывается, что минимальная частота тактирования равна dc (direct current). Это означает, что возможно использование МК в пошаговом режиме, например, для отладки. Мощность потребления МК при низких частотах тактирования обычно отражает значение тока потребления при fOSC = 32768 Гц (часовой кварцевый резонатор).
4.8. Тактовые генераторы МК
Современные МК содержат встроенные тактовые генераторы, которые требуют минимального числа внешних времязадающих элементов. На практике используются три основных способа определения тактовой частоты генератора: с помощью кварцевого резонатора, керамического резонатора и внешней RC-цепи.
Типовая схема подключения кварцевого или керамического резонатора приведена на рис. 4.9а.

Рис. 4.9. Тактирование с использованием кварцевого или керамического резонаторов (а) и с использованием RC-цепи (б).
Кварцевый или керамический резонатор Q подключается к выводам XTAL1 XTAL2, которые обычно представляют собой вход и выход инвертирующего усилителя. Номиналы конденсаторов C1 C2 определяются производителем МК для конкретной частоты резонатора. Иногда требуется включить резистор порядка нескольких мегаом между выводами XTAL1 XTAL2 для стабильной работы генератора.
Использование кварцевого резонатора позволяет обеспечить высокую точность и стабильность тактовой частоты (разброс частот кварцевого резонатора обычно составляет менее 0,01%). Такой уровень точности требуется для обеспечения точного хода часов реального времени или организации интерфейса с другими устройствами. Основными недостатками кварцевого резонатора являются его низкая механическая прочность (высокая хрупкость) и относительно высокая стоимость.
При менее жестких требованиях к стабильности тактовой частоты возможно использование более стойких к ударной нагрузке керамических резонаторов. Многие керамические резонаторы имеют встроенные конденсаторы, что позволяет уменьшить количество внешних подключаемых элементов с трех до одного. Керамические резонаторы имеют разброс частот порядка нескольких десятых долей процента (обычно около 0,5 %).
Самым дешевым способом задания тактовой частоты МК является использование внешней RС-цепи, как показано на рис. 4.9б. Внешняя RC-цепь не обеспечивает высокой точности задания тактовой частоты (разброс частот может доходить до десятков процентов). Это неприемлемо для многих приложений, где требуется точный подсчет времени. Однако имеется масса практических задач, где точность задания тактовой частоты не имеет большого значения.
Зависимость тактовой частоты МК от номиналов RC-цепи зависит от конкретной реализации внутреннего генератора и приводится в руководстве по применению контроллера.
Практически все МК допускают работу от внешнего источника тактового сигнала, который подключается ко входу XTAL1 внутреннего усилителя. При помощи внешнего тактового генератора можно задать любую тактовую частоту МК (в пределах рабочего диапазона) и обеспечить синхронную работу нескольких устройств.
Некоторые современные МК содержат встроенные RC или кольцевые генераторы, которые позволяют контроллеру работать без внешних цепей синхронизации. Работа внутреннего генератора обычно разрешается путем программирования соответствующего бита регистра конфигурации МК.
В большинстве моделей МК частота времязадающего элемента (резонатора или RC-цепи) и частота тактирования fBUS жестко связаны коэффициентом деления встроенного делителя частоты. Поэтому изменение частоты программным путем не представляется возможным. Однако ряд последних семейств МК (например, HC08 фирмы Motorola) имеют в своем составе схему тактирования, основанную на принципе синтезатора частоты с контуром фазовой автоподстройки (PLL - phase loop lock). Такая схема работает как умножитель частоты и позволяет задавать тактовую частоту с помощью низкочастотного кварцевого резонатора, что снижает уровень электромагнитного излучения МК. Коэффициенты деления контура PLL могут быть изменены программным путем, что позволяет снизить тактовую частоту (и, соответственно, потребляемую мощность) в промежутки времени, когда высокое быстродействие не требуется.
В некоторых МК семейства AVR фирмы Atmel тактовая частота контроллера, задаваемая внутренней RC-цепью, также может изменяться программными средствами.
4.9. Аппаратные средства обеспечения надежной работы МК
Прикладная программа, записанная в память программ МК, должна обеспечивать его надежную работу при любых комбинациях входных сигналов. Однако в результате электромагнитных помех, колебаний напряжения питания и других внешних факторов предусмотренный разработчиком ход выполнения программы может быть нарушен. С целью обеспечения надежного запуска, контроля работы МК и восстановления работоспособности системы в отсутствие оператора все современные МК снабжаются аппаратными средствами обеспечения надежной работы. К ним относятся:
схема формирования сигнала сброса МК;
модуль мониторинга напряжения питания;
сторожевой таймер.
4.9.1. Схема формирования сигнала сброса МК
При включении напряжения питания МК должен начать выполнять записанную в памяти программу работы. На этапе нарастания напряжения питания МК принудительно переводится в начальное состояние, которое называют состоянием сброса. При этом устанавливаются в исходное состояние внутренние магистрали МК, сигналы управления и регистры специальных функций. Последние определяют начальное состояние периферийных модулей МК, которое чаще всего по умолчанию неактивно.
С целью обеспечения надежного запуска от любых источников питания с различной динамикой нарастания напряжения большинство современных МК содержат встроенный детектор напряжения питания (схема Power-On-Reset - POR), который формирует сигнал сброса при нарастании напряжения питания. В частности, входящий в состав МК семейства PIC16 таймер установления питания (PWRT) начинает отсчет времени после того, как напряжение питания пересекло уровень около 1,2:1,8 В. По истечении выдержки около 72 мс считается, что напряжение достигло номинала.
Сразу после выхода из состояния сброса МК выполняет следующие действия:
запускает генератор синхронизации МК. Для стабилизации частоты тактирования внутренними средствами формируется задержка времени;
считывает энергонезависимые регистры конфигурации в соответствующие регистры ОЗУ (если необходимо);
загружает в счетчик команд адрес начала рабочей программы;
производит выборку первой программы из памяти программ и приступает к выполнению программы.
Адрес ячейки памяти, в которой хранится код первой исполняемой команды, называют вектором начального запуска или вектором сброса. В некоторых МК этот адрес однозначно определен и приведен в техническом описании. Про такие МК говорят, что они имеют фиксированный вектор сброса. В других МК вектор сброса может быть произвольно определен пользователем. На этапе программирования МК необходимый вектор начального запуска записывается в ячейки с фиксированными адресами, и при выходе МК из сброса автоматически загружается в счетчик команд. О таких МК говорят, что они имеют загружаемый вектор сброса. Загружаемый вектор сброса имеют все 8-разрядные МК фирмы Motorola, выполненные по структуре с единым адресным пространством команд и данных.
Для перевода МК в состояние сброса при установившемся напряжении питания достаточно подать сигнал высокого или низкого уровня (в соответствии со спецификацией МК) на вход сброса (RESET). Обычно для формирования сигнала сброса при включении напряжения питания и нажатии кнопки сброса используют RC-цепь. Типовые схемы формирования сигнала сброса представлены на рис. 4.10.
Кнопка Кн предназначена для "ручного" сброса МК при отладке. Диод VD препятствует попаданию на вход RESET отрицательного напряжения при выключении питания. Номиналы R C определяют задержку времени, необходимую для завершения всех переходных процессов при сбросе (указываются в техническом описании на МК). Триггер Шмитта на входе допускает подачу сигнала сброса с ненормированной длительностью фронта. При отсутствии триггера Шмитта на входе приходится использовать специальную внешнюю схему формирователя.
В современных МК линия RESET обычно является двунаправленной и имеет низкий активный уровень. При нажатии кнопки "сброс" или включении питания буфер линии устанавливается в режим ввода и реализует так называемый внешний сброс. МК может перейти в состояние сброса также по сигналам устройств контроля состояния, которые имеются в составе контроллера. В этом случае говорят, что МК находится в состоянии внутреннего сброса. При этом буфер линии RESET устанавливается в состояние вывода с низким логическим уровнем на выходе. Данный сигнал может быть использован для установки в начальное состояние периферийных ИС.

Рис. 4.10. Типовые схемы формирования сигнала внешнего сброса для МК с высоким активным уровнем сигнала сброса (а) и низким активным уровнем сигнала сброса (б).
Порядок выхода МК из состояний внешнего и внутреннего сброса в целом одинаков.
4.9.2. Блок детектирования пониженного напряжения питания
В реальных условиях эксплуатации может сложиться такая ситуация, при которой напряжение питания МК опустится ниже минимально допустимого, но не достигнет порога отпускания схемы POR. В этих условиях МК может "зависнуть". При восстановлении напряжения питания до номинального значения МК останется неработоспособным.
Для восстановления работоспособности системы после "просадки" напряжения питания МК необходимо снова сбросить. Для этой цели в современных МК реализован дополнительный блок детектирования пониженного напряжения питания. Такой модуль используется в МК семейства HC08 фирмы Motorola, аналогичный модуль имеется в составе семейства PIC17 фирмы Microchip. Рассматриваемый модуль генерирует сигнал внутреннего сброса при снижении напряжения питания до уровня чуть ниже минимально допустимого. Уровень срабатывания блока детектирования пониженного напряжения питания значительно превышает напряжение сохранения данных в ОЗУ МК. Событие сброса по сигналу блока пониженного напряжения питания отмечается специальным битом в одном из регистров МК. Следовательно, программно анализируя этот бит после сброса МК, можно установить, что данные целы, и продолжить выполнение программы.
4.9.3. Сторожевой таймер
Если, несмотря на все принятые меры, МК все же "завис" , то на случай выхода из этого состояния все современные контроллеры имеют встроенный модуль сторожевого таймера. Принцип действия сторожевого таймера показан на рис. 4.11.

Рис. 4.11. Принцип действия сторожевого таймера.
Основу сторожевого таймера составляет многоразрядный счетчик. При сбросе МК счетчик обнуляется. После перехода МК в активный режим работы значение счетчика начинает увеличиваться независимо от выполняемой программы. При достижении счетчиком максимального кода генерируется сигнал внутреннего сброса, и МК начинает выполнять рабочую программу сначала.
Для исключения сброса по переполнению сторожевого таймера рабочая программа МК должна периодически сбрасывать счетчик. Сброс счетчика сторожевого таймера осуществляется путем исполнения специальной команды (например, CLRWDT) или посредством записи некоторого указанного кода в один из регистров специальных функций. Тогда при нормальном, предусмотренном разработчиком, порядке исполнения рабочей программы переполнения счетчика сторожевого таймера не происходит, и он не оказывает влияния на работу МК. Однако, если исполнение рабочей программы было нарушено, например, вследствие "зависания", то велика вероятность того, что счетчик не будет сброшен вовремя. Тогда произойдет сброс по переполнению сторожевого таймера, и нормальный ход выполнения рабочей программы будет восстановлен.
Модули сторожевых таймеров конкретных МК могут иметь различные особенности:
в ряде МК векторы внешнего сброса и сброса по переполнению сторожевого таймера совпадают. Это не позволяет выявить причину сброса программным путем и затрудняет написание рабочей программы. Более высокоуровневые МК имеют либо различные векторы сброса, либо отмечают событие сброса по переполнению сторожевого таймера установкой специального бита в одном из регистров специальных функций;
в некоторых МК при переходе в один из режимов пониженного энергопотребления, когда рабочая программа не выполняется, автоматически приостанавливается работа сторожевого таймера. В других МК сторожевой таймер имеет независимый тактовый генератор, который продолжает функционировать и в режиме ожидания. В этом случае необходимо периодически выводить МК из состояния ожидания для сброса сторожевого таймера. В PIC-контроллерах фирмы Microchip выработка таких сбросов может быть запрещена путем записи нуля в специальный бит конфигурации WDTE.
Использование сторожевого таймера существенно повышает способность к самовосстановлению системы на основе МК.
4.10. Дополнительные модули МК
Описанные выше модули составляют так называемый базовый комплект МК и входят в состав любого современного контроллера. Очевидна необходимость включения в состав МК дополнительных модулей, состав и возможности которых определяются конкретной решаемой задачей. Среди таких дополнительных модулей следует, прежде всего, отметить:
модули последовательного ввода/вывода данных;
модули аналогового ввода/вывода.
4.10.1. Модули последовательного ввода/вывода
Наличие в составе 8-разрядного МК модуля контроллера последовательного ввода/вывода стало в последнее время обычным явлением. Задачи, которые решаются средствами модуля контроллера последовательного ввода/вывода, можно разделить на три основные группы:
связь встроенной микроконтроллерной системы с системой управления верхнего уровня, например, с персональным компьютером. Чаще всего для этой цели используются интерфейсы RS-232C и RS-485;
связь с внешними по отношению к МК периферийными ИС, а также с датчиками физических величин с последовательным выходом. Для этих целей используются интерфейсы I2C, SPI, а также нестандартные протоколы обмена;
интерфейс связи с локальной сетью в мультимикроконтроллерных системах. В системах с числом МК до пяти обычно используются сети на основе интерфейсов I2C, RS-232C и RS-485 с собственными сетевыми протоколами высокого уровня. В более сложных системах все более популярным становится протокол CAN.
С точки зрения организации обмена информацией упомянутые типы интерфейсов последовательной связи отличаются режимом передачи данных (синхронный или асинхронный), форматом кадра (число бит в посылке при передаче байта полезной информации) и временными диаграммами сигналов на линиях (уровни сигналов и положение фронтов при переключениях).
Число линий, по которым происходит передача в последовательном коде, обычно равно двум (I2C, RS-232C, RS-485) или трем (SPI, некоторые нестандартные протоколы). Данное обстоятельство позволяет спроектировать модули контроллеров последовательного обмена таким образом, чтобы с их помощью на аппаратном уровне можно было реализовать несколько типов последовательных интерфейсов. При этом режим передачи (синхронный или асинхронный) и формат кадра поддерживаются на уровне логических сигналов, а реальные физические уровни сигналов для каждого интерфейса получают с помощью специальных ИС, которые называют приемопередатчиками, конверторами, трансиверами.
Среди различных типов встроенных контроллеров последовательного обмена, которые входят в состав тех или иных 8-разрядных МК, сложился стандарт "де-факто" - модуль UART (Universal Asynchronous Receiver and Transmitter). UART - это универсальный асинхронный приемопередатчик. Однако большинство модулей UART, кроме асинхронного режима обмена, способны также реализовать режим синхронной передачи данных.
Не все производители МК используют термин UART для обозначения типа модуля контроллера последовательного обмена. Так, в МК фирмы Motorola модуль асинхронной приемопередачи, который поддерживает те же режимы асинхронного обмена, что и UART, принято называть SCI (Serial Communication Interface). Следует отметить, что модуль типа SCI обычно реализует только режим асинхронного обмена, то есть его функциональные возможности уже по сравнению с модулями типа UART. Однако бывают и исключения: под тем же именем SCI в МК МС68НС705В16 скрывается модуль синхронно-асинхронной передачи данных.
Модули типа UART в асинхронном режиме работы позволяют реализовать протокол обмена для интерфейсов RS-232C, RS-422А, RS-485, в синхронном режиме - нестандартные синхронные протоколы обмена, и в некоторых моделях - SPI. В МК фирмы Motorola традиционно предусмотрены два модуля последовательного обмена: модуль SCI с возможностью реализации только протоколов асинхронной приемопередачи для интерфейсов RS-232C, RS-422A, RS-485 и модуль контроллера синхронного интерфейса в стандарте SPI.
Протоколы интерфейсов локальных сетей на основе МК (I2C и CAN) отличает более сложная логика работы. Поэтому контроллеры CAN интерфейса всегда выполняются в виде самостоятельного модуля. Интерфейс I2C с возможностью работы как в ведущем, так и ведомом режиме, также обычно поддерживается специальным модулем (модуль последовательного порта в МК 89С52 фирмы Philips). Но если реализуется только ведомый режим I2C, то в МК PIC16 фирмы Microchip он успешно сочетается с SPI: настройка одного и того же модуля на один из протоколов осуществляется путем инициализации.
В последнее время появилось большое количество МК со встроенными модулями контроллеров CAN и модулями универсального последовательного интерфейса периферийных устройств USB (Universal Serial Bus). Каждый из этих интерфейсов имеет достаточно сложные протоколы обмена, для ознакомления с которыми следует обращаться к специальной литературе.
4.10.2. Модули аналогового ввода/вывода
Необходимость приема и формирования аналоговых сигналов требует наличия в МК модулей аналогового ввода/вывода.
Простейшим устройством аналогового ввода в МК является встроенный компаратор напряжения. Компаратор сравнивает входное аналоговое напряжение с опорным потенциалом VREF и устанавливает на выходе логическую "1", если входное напряжение больше опорного. Компараторы удобнее всего использовать для контроля определенного значения входного напряжения, например, в термостатах. В комбинации с внешним генератором линейно изменяющегося напряжения встроенный компаратор позволяет реализовать на МК интегрирующий аналого-цифровой преобразователь (АЦП).
Однако более широкие возможности для работы с аналоговыми сигналами дает АЦП, встроенный в МК. Чаще всего он реализуется в виде модуля многоканального АЦП, предназначенного для ввода в МК аналоговых сигналов с датчиков физических величин и преобразования этих сигналов в двоичный код. Структурная схема типового модуля АЦП представлена на рис. 4.12.
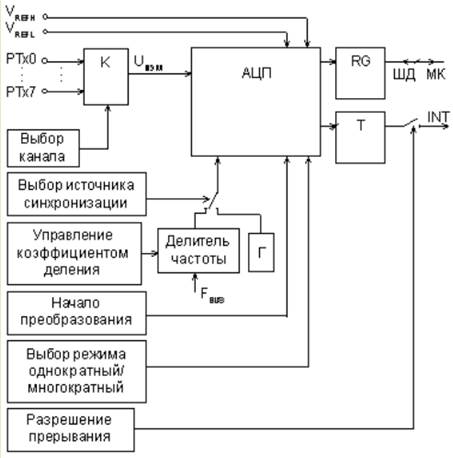
Рис. 4.12. Структура модуля АЦП.
Многоканальный аналоговый коммутатор К служит для подключения одного из источников аналоговых сигналов (PTx0...PTx7) ко входу АЦП. Выбор источника сигнала для преобразования осуществляется посредством записи номера канала коммутатора в соответствующие разряды регистра управления АЦП.
Два вывода модуля АЦП используются для задания опорного напряжения Uоп: VREFH - верхний предел Uоп, VREFL - нижний предел. Разность потенциалов на входах VREFH VREFL и составляет Uоп. Разрешающая способность АЦП составляет Uоп/2n, где n - число двоичных разрядов в слове результата. Максимальное значение опорного напряжения, как правило, равно напряжению питания МК. Если измеряемое напряжение Uизм > VREFH, то результат преобразования будет равен FF, код 00 соответствует напряжениям Uизм < VREFL. Для достижения максимальной точности измерения следует выбрать максимально допустимое значение Uоп. В этом случае напряжение смещения нуля входного буфера и нелинейность передаточной характеристики АЦП будут вносить относительно малые погрешности.
Собственно аналого-цифровой преобразователь выполнен по методу последовательного приближения. Практически во всех моделях 8-разрядных МК разрядность АЦП также составляет 8 разрядов. Соответственно, формат представления результатов измерения АЦП - однобайтовый. Исключение составляют лишь модули АЦП микроконтроллеров для управления преобразователями частоты для электроприводов, разрешающая способность которых равна 10 разрядам. Два младших разряда результата получают с помощью дополнительного емкостного делителя, не связанного с регистром последовательного приближения.
Длительность такта преобразования задает генератор синхронизации: один цикл равен двум периодам частоты генератора tADC. Время преобразования для типовых модулей АЦП микроконтроллеров составляет от единиц до десятков микросекунд.
Источником синхронизации модуля АЦП может служить встроенный RC-генератор (Г) или импульсная последовательность тактирования межмодульных магистралей МК. В первом случае частота синхронизации АЦП обязательно окажется оптимальной, то есть той, которая рекомендуется в техническом описании. Во втором случае выбранная по другим соображениям fBUS может оказаться неподходящей для модуля АЦП. На этот случай в составе некоторых модулей предусмотрен программируемый делитель частоты fBUS.
Момент завершения каждого цикла преобразования отмечается установкой триггера готовности данных. Если прерывания от модуля АЦП разрешены, то генерируется запрос на прерывания. Как правило, чтение регистра результата сбрасывает триггер готовности.
Большинство модулей АЦП имеют только режим программного запуска: установка одного из битов регистра режима запускает очередное измерение. Наиболее универсальные модули АЦП имеют также режим автоматического запуска, при котором после завершения одного цикла преобразования немедленно начинается следующий. Однако данные измерения каждого цикла должны быть считаны программным способом.
Цифро-аналоговые преобразователи в составе МК являются большой редкостью. Функция цифро-аналогового преобразователя реализуется средствами модуля программируемого таймера в режиме ШИМ. На одном из выводов МК формируется высокочастотная импульсная последовательность с регулируемой длительностью импульса. Полученный сигнал сглаживается фильтром нижних частот на операционном усилителе. Разрешающая способность такого ЦАП определяется дискретностью регулирования коэффициента заполнения в режиме ШИМ.