Автоматизированные складские системы
Автоматизированные складские системы ГПС совместно с транспортным оборудованием (рисунок 12.12) предназначены для выполнения следующих функций: приема с внутризаводского или внутрицехового транспорта сырья, материалов, заготовок, инструментов, пустой тары и их временного складирования; выдачи этих грузов по заранее предусмотренному графику, порядку или на основании команд приема от транспортной системы ГПС готовых изделий, отходов производства бракованной продукции и их временного хранения: выдачи на внутризаводской или внутрицеховой транспорт этих грузов по командам или по мере подхода транспортных средств.
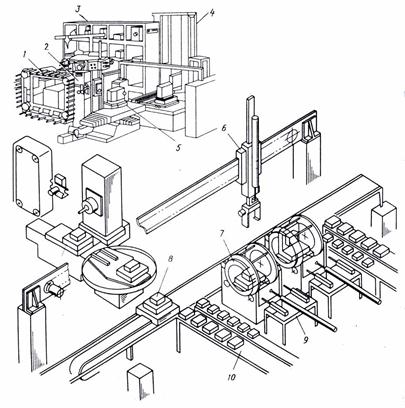
Рисунок 12.12 — Транспортирование и подача заготовок к стаку: 1 — цепной инструментальный магазин; 2 — горизонтальный многоцелевой станок; 3 — склад-накопитель; 4 кран-штабелер; 5 — стол с управлением по восьми координатам; 6 — манипулятор; 7 — реверсивное устройство; 8 — платформа для перемещения спутников; 9 — толкатель; 10 — транспортер
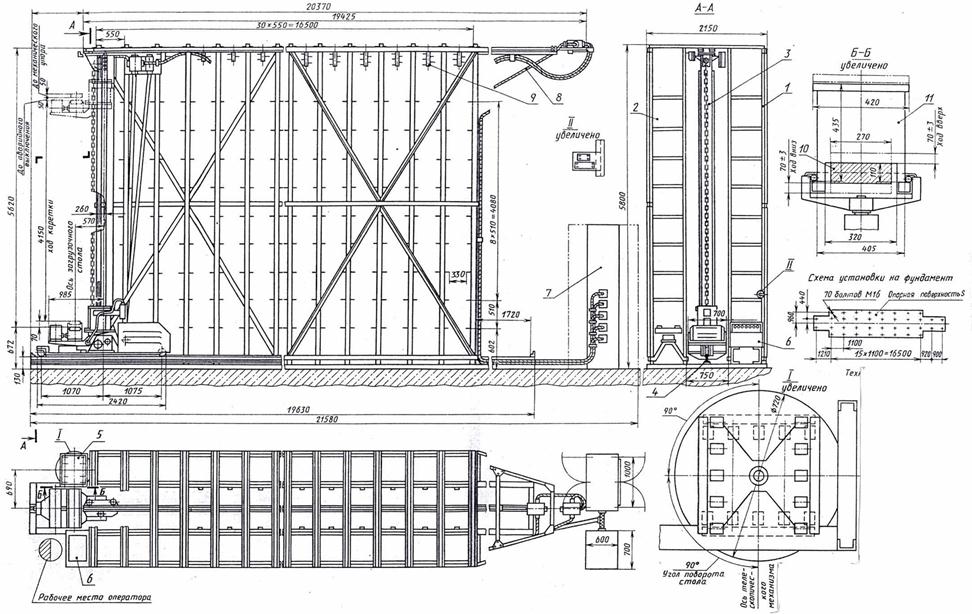
Рисунок 12.13 — Автоматизированный стеллажно-тарный склад СТАС-25
В состав автоматизированного технологического складского модуля СТАС-250АТ (рисунок 12.13) входят два каркасных стеллажа 1 с полками 2 для размещения тары с грузом; автоматический кран-штабелер 3, перемещающийся по рельсу 4; приемное устройство, выполненное в виде загрузочно-разгрузочного поворотного стола 5 с механизмом подъема; устройство управления с пультом управления 6; шкаф электрооборудования 7, который кабелем 8 подвешен на кронштейнах 9, соединен с краном-штабелером.
Кран-штабелер состоит из колонны с грузоподъемной платформой, на которой смонтирован выдвижной телескопический стол 10 для установки на нем тары 11 с грузом. По команде от системы управления на загрузку склада кран-штабелер подает на приемное устройство пустую тару или приспособления-спутники, которые загружаются заготовками, а затем транспортируются краном-штабелером в определенную ячейку стеллажа. При поступлении команды на разгрузку склада кран-штабелер забирает заготовки вместе с приспособлением-спутником или тарой из ячейки стеллажа, адрес которой задается системой управления, транспортирует и устанавливает их на стол загрузки-разгрузки. После окончания обработки по команде управления готовые детали с приспособлением-спутником (или в таре) снимаются штабелером в заданную ячейку стеллажа. Система управления складом имеет связь с ЭВМ ГПС. Наладочный и полуавтоматический режимы осуществляются от кнопок на пульте оператора крана-штабелера.
Типовые схемы компоновок автоматизированных складов показаны на рисунке 12.14, где 1 — робот-штабелер, 2 — стеллажи, 3 — приемно-выдающие устройства.

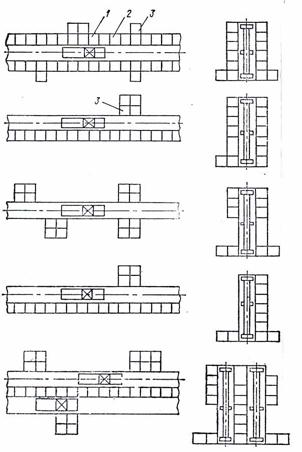
Рисунок 12.14 — Типовые схемы компоновок Рисунок 12.15 — Схема робота-штабелера РШ-500
автоматизированных складов
Схема робота-штабелера типа РШ-500 изображена на рисунке 12.15. Рама 7, служащая основной конструкцией, перемещается от привода 4 с тормозным устройством 3 по нижней опорной 2 и верхней направляющей 8 балкам. Грузоподъемник 6 со сдвоенным захватом груза 5 приводится в действие приводом подъема захвата 1.
Системы управления складом отечественного производства построены на базе микроЭВМ, «Электроника-60», «Электроника С5-12», СМ-1800, миниЭВМ СМ-2, М-600, СМ-1420.