Краткие теоретические сведения
Трехфазный асинхронный двигатель
Целью работы является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n1 определяется по формуле
n1 =  , об/мин (1)
, об/мин (1)
где f1 - частота сети, Гц;
р - число пар полюсов.
Разность в частотах вращения ротора n2 и поля статора n1 выражают скольжением
s =  (2)
(2)
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с f = 50 Гц.
Таблица 1.
| Частота вращения при s н = 5% | Число пар полюсов на статоре | ||||
| Поля статора n1, об\мин | |||||
| Ротора n2, об\мин |
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Y/Δ, 380/220 В.
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
n1 = (1– s 1), об/мин. (3)
Электрическая мощность Р1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность Р2 на валу и потери мощности на нагрев обмоток статора и ротора ΔРэ1 и ΔРэ2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис ΔРст и на потери от трения в подшипниках ΔРтр.
Таким образом,баланс мощности в двигателе выразится так
Р1 = Р2 + ΔРтр + ΔРэ + ΔРст, Вт. (4)
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
Р1 = 3 Р1ф, Вт, (5)
где Р1ф = U1ф ∙ I1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Рмех складывается из полезной мощности на валу Р2 и потерь на трение Ртр
Рмех = Р2 + Ртр, Вт. (6)
Механическая мощность может быть определена по формуле
Рмех = 0,105М ∙n2, Вт, (7)
где М – вращающий момент, Нм;
n2 – частота вращения ротора, об\мин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали ΔРст, практически не изменяются при увеличении нагрузки на валу Р2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди ΔРэ зависят от нагрузки и называются переменными.
Коэффициент полезного действия асинхронного двигателя η определяется как отношение полезной мощности на валу Р2 к потребляемой из сети Р1
η =  =
=  (8)
(8)
Полезная мощность двигателя на валу Р2 может быть определена по формуле
Р2 = М ∙ ω = М ∙  , Вт (9)
, Вт (9)
или Р2 = 0,105 М∙n2, Вт. (10)
Тогда
η =  =
=  =
=  , (11)
, (11)
где U1ф, В; I1ф, А; Cos φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
Cos φф =  =
=  (12)
(12)
В лабораторной работе коэффициент мощности Cos φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n2 = f (M), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).
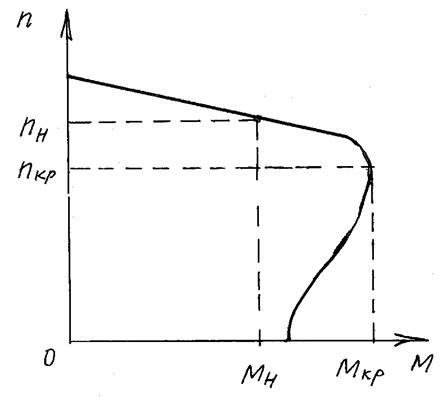
Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
М =  , Нм (13)
, Нм (13)
где U1ф – фазное напряжение обмотки статора, В;
n1 – синхронная частота вращения магнитного поля статора, об/мин;
s – скольжение;
р – число пар полюсов;
R1, R2’, Хк – параметры схемы замещения асинхронного двигателя, Ом (рис.2).

Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате  , скольжения s, частоты тока в статоре f1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
, скольжения s, частоты тока в статоре f1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s при остальных постоянных в формуле вращающего момента можно получить различные значения моментов Мн, Мкр, Мп , показанных на естественной механической характеристике (рис.1) .
Номинальный вращающий момент Мн может быть определен по формулам
Мн = 9,55  , Нм (14)
, Нм (14)
или
Мн = 9,55  , Нм (15)
, Нм (15)
В каталоге на асинхронные двигатели указаны паспортные данные: Р2н, U1н, s н, n2н, Мн, Мкр/Мн, Сos φн и способ соединения обмоток статора.
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n2, вращающего момента М, скольжения s тока фазы статора I1ф, коэффициента мощности Сos φ и к.п.д. двигателя от полезной мощности на валу Р2 при U1 = Const и f1 = Const.
При повышении Р2 величина скольжения s увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).

Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р2 = 0 , частота вращения ротора n2 может быть принята равной частоте вращения магнитного поля статора n1 и s = 0.
Так как Р2 ≈ Рмех , а Рмех = 0,105 М∙n2, то рабочая характеристика
n2 = f (Р2) подобна механической характеристике (рис.4).

Рис.4. Механическая характеристика асинхронного двигателя.
Вращающий момент М на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода М0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу Р2.
Таким образом, можно считать, что М ≈  . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n2 уменьшается при увеличении Р2, в связи с этим характеристика М = f (Р2) нелинейна и вращающий момент М быстро нарастает с увеличением Р2 (рис.5).
. Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n2 уменьшается при увеличении Р2, в связи с этим характеристика М = f (Р2) нелинейна и вращающий момент М быстро нарастает с увеличением Р2 (рис.5).

Рис.5. Зависимость М = f (Р2)
Кривая I1ф = f (Р2) подобна рабочей характеристике М = f (Р2) (рис.6).
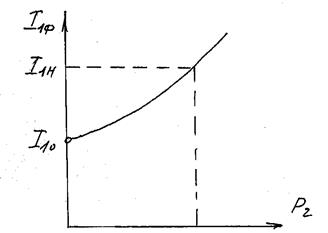
Рис.5. Зависимость I1ф = f (Р2)
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I1ф , то ток в фазе статора пропорционален полезной мощности Р2 и увеличивается при ее повышении. При холостом ходе Р2 = 0 и I1ф = I10 (рис. 5).
При холостом ходе двигателя коэффициент мощности Cos φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу Р2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность Р1, потребляемая из сети, увеличивается, а реактивная мощность Q1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных Cos φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.

Рис.6. Зависимость Cos φ = f (Р2)
Анализируя зависимость η = f (Р2) , можно видеть, что при изменении нагрузки на валу Р2 постоянные потери ΔРтр и ΔРст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток ΔРэ значительно меньше роста полезной мощности на валу. При Р2 = Р2н постоянные потери ΔРтр и ΔРст становятся равными переменным ΔРэ , а доля потерь в энергетическом балансе уже становится соизмеримой с Р2 . Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
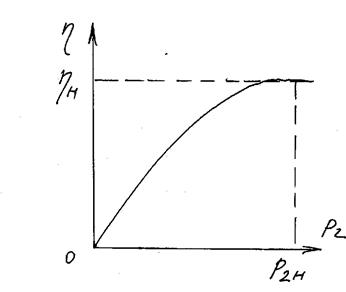
Рис.7. Зависимость η = f (Р2)
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. 8) и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U1ф по вольтметру V, ток в фазе I1ф по амперметру А1, потребляемую фазой двигателя активную мощность P1ф по ваттметру W, частоту вращения ротора n по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Данные опытов внести в табл.2.
Таблица 2
| № п/п | Измеренные величины | Вычисленные величины | ||||||||||
| М Нм | U1ф В | I1ф А | P1ф Вт | n2 об/мин | Cos φ | М Нм | P2 Вт | P1 Вт | S1 ВА | Cos φ | s | |
| … | ||||||||||||
7. По окончании измерений нажать кнопку «Стоп», обесточить схему и показать результаты преподавателю.
8. После получения разрешения преподавателя разобрать схему.
9. По измеренным данным вычислить вращающий момент на валу двигателя М, Нм; полезную мощность на валу P2 , Вт; активную мощность, потребляемую двигателем P1 , Вт; полную мощность, потребляемую двигателем S1 ; скольжение s; коэффициент мощности Cos φ и коэффициент полезного действия η .
10. По измеренным и вычисленным данным построить на миллиметровой бумаге характеристики двигателя:
а) механическую характеристику n2 = f (M) ;
б) рабочие характеристики s = f (Р2); n2 = f (Р2); M = f (Р2); I1ф = f (Р2).
в) рабочую характеристику Cos φ = f (Р2) , измеренную и вычисленную.
11. Материалы измерений и вычислений, полученные характеристики оформить в виде отчета по лабораторной работе.

Рис. 8. Электрическая схема исследования трехфазного асинхронного двигателя с короткозамкнутым ротором:
А1 – амперметр переменного тока на 1 А; А2 – амперметр постоянного тока на 1 А; W – ваттметр на 150 Вт; Ф – фазометр на 127 В 5 А в положении «приемник»; V – вольтметр переменного тока на 150 В; АТ – автотрансформатор; ЭТ – электромагнитный тормоз.
Контрольные вопросы
1. Устройство и принцип работы асинхронного двигателя.
2. Что такое скольжение (sхх, sпуск)?
3. Почему двигатель называется асинхронным?
4. Условие возникновения вращающегося магнитного поля.
5. Стандартные величины n1 (частота вращения магнитного
поля).
6. Режим холостого хода асинхронного двигателя.
7. Почему Ixx асинхронного двигателя больше чем I0 трансформатора.
8. Схема замещения асинхронного двигателя в режиме холостого хода.
9. Упрощенная схема замещения.
10.Почему Iпуск асинхронного двигателя в 6…8 раз больше Iн?
11 .Механическая характеристика асинхронного двигателя n = f(M); n = f(s) (естественная и реостатная).
12.Формула Клосса.
13.Регулирование числа оборотов асинхронного двигателя.
14.Достоинства и недостатки каждого метода.
15.Типы роторов (короткозамкнутый и фазный).
16.Предназначение фазного ротора.
17.Метод ограничения Iпуск у асинхронного двигателя с короткозамкнутым ротором.
18. Метод ограничения Iпуск у асинхронного двигателя с фазным ротором.
19.Энергетическая диаграмма. Потери мощности в асинхронном двигателе.
20.КПД асинхронного двигателя.
21.Достоинства и недостатки асинхронного двигателя.