Кинетостатический расчет плоских механизмов с низшими кинематическими парами
Зная активные силы, действующие на механизм, и силы инерции звеньев можно определить силы реакции в его кинематических парах и движущий момент (или силу) на ведущем звене. Эта задача может быть решена аналитическим или графоаналитическим методом.
Механизм расчленяют на структурные группы, которые являются статически определимыми (группы Асура) и проводят последовательный расчет, начиная с наиболее удаленной от ведущего звена группы.
Сила взаимодействия звеньев, образующих низшую кинематическую пару, представляет собой равнодействующую элементарных сил, распределенных по поверхности соприкосновения звеньев (Рис 7.2а, б).
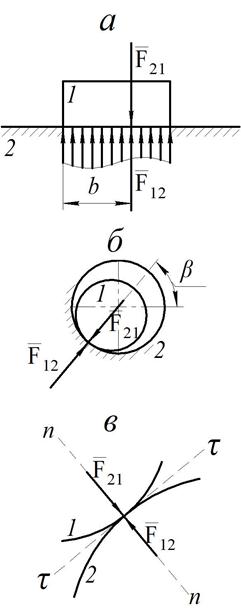 Эта равнодействующая (при отсутствии сил трения) направлена по нормали к поверхности, но ее величина и точка приложения не известны, т.е. каждая низшая кинематическая пара приводит к появлению двух неизвестных, подлежащих определению в процессе расчета. В высших кинематических парах (контакт звеньев происходит либо в точке, либо по линии) сила взаимодействия будет направлена по нормали в точке соприкосновения звеньев (при отсутствии сил трения) (Рис 7.2в). Таким образом, для высшей кинематической пары не известной оказывается только величина силы.
Эта равнодействующая (при отсутствии сил трения) направлена по нормали к поверхности, но ее величина и точка приложения не известны, т.е. каждая низшая кинематическая пара приводит к появлению двух неизвестных, подлежащих определению в процессе расчета. В высших кинематических парах (контакт звеньев происходит либо в точке, либо по линии) сила взаимодействия будет направлена по нормали в точке соприкосновения звеньев (при отсутствии сил трения) (Рис 7.2в). Таким образом, для высшей кинематической пары не известной оказывается только величина силы.
После того как произведен силовой расчет всех структурных групп подвижное звено первичного механизма получает статическую определенность, что дает возможность определить движущую силу, действующую на это звено.
Рис. 7.2